

7.1. Полунатурное моделирование
7.1.1. Общие положения
Организация испытаний САУ на основе полунатурного моделирования отвечает поэлементному комплексированию устройств в систему так, что можно провести оценку каждого устройства в отдельности, прежде чем они будут объединены с другими.
При этом одновременно используются адекватные математические модели части устройств наряду с ее реальной аппаратурой, макетами, образцами.
Испытания САУ с участием в контуре человека, например, САУ летательного аппарата (ЛА), позволяет оценить взаимодействие САУ с человеком – оператором, построить тренажер для отработки действий оператора.
Программа летных испытаний САУ ЛА обычно на этапе ее проектирования ограничена несколькими летными экспериментами, поэтому применение полунатурного моделирования позволяет достичь оптимального распределения работ между испытателями САУ ЛА с использованием моделей и натурными (летными) испытаниями.
Практика показывает, что за счет полунатурного моделирования удается сократить натурные испытания на 30%.
Важным принципом, закладываемым при организации испытаний САУ с помощью полунатурного моделирования, является принцип испытаний на основе комплексного воздействия возмущений.
Оценка результатов комплексных испытаний проводится обычно на основе суперпозиции реакций на отдельные возмущающие воздействия.
Эти воздействия воспроизводятся при так называемых частных испытаниях. Важно иметь в виду, что весьма сложно оценить степень приближения таких испытаний к реальным условиям работы САУ, когда все возмущения действуют одновременно.
Комплексные испытания иногда проводят по схеме простого механического соединения динамических моделирующих стендов.
Однако в такой схеме невозможно практически оценить достоверность испытаний из-за неконтролируемого взаимодействия отдельных механических элементов испытательного оборудования и сложность соблюдения условий подобия.
В то же время комплексные испытания оказываются возможными на основе динамических моделирующих комплексов.
7.1.2. Автоматизация испытаний на основе полунатурного моделирования
Автоматизация испытаний на основе полунатурного моделирования сводится:
- к формированию возмущающих воздействий, задаваемых на реальную аппаратуру;
- к измерению сигналов состояния САУ;
- сбору и накоплению данных испытаний, обработке результатов и изготовлению проектных документов.
Отсюда, соответственно, возникает необходимость разработки сразу нескольких базовых инструментов испытателя.
Это:
- во-первых, инструмент для формирования возмущающих воздействий;
- во-вторых, инструмент для обработки результатов испытаний и;
- в-третьих, инструмент для управления испытаниями.
Алгоритмы формирования воздействий
Алгоритм формирования детерминированных воздействий
Алгоритм формирования детерминированных воздействий, составленный с учетом собственного движения ДМС, имеет вид:
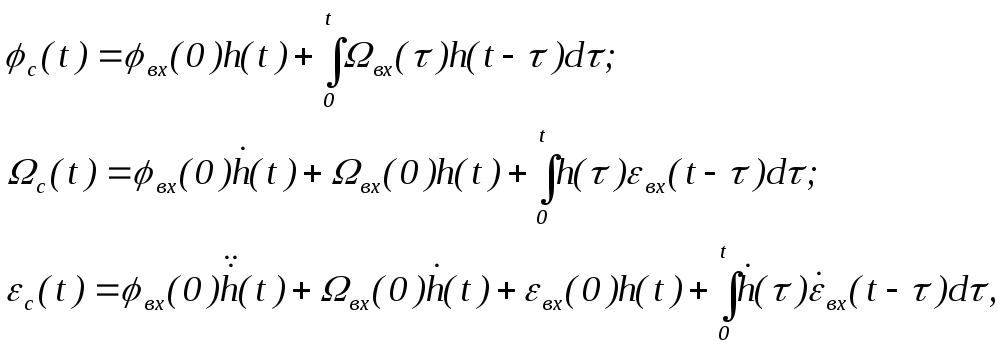 (7.1)
(7.1)
где
![]() ,
,![]() ,
,![]() - начальные значения входного сигнала
ДМС
- начальные значения входного сигнала
ДМС![]() ,
его скорости
,
его скорости![]() и ускорения
и ускорения![]() ;
;
![]() ,
,
![]() ,
,![]() - импульсная переходная функция ДМС и
ее производные.
- импульсная переходная функция ДМС и
ее производные.
Алгоритм формирования случайных воздействий
Алгоритм формирования случайных испытательных сигналов задается в виде многомерного случайного процесса
![]() ,
(7.2)
,
(7.2)
нестационарного относительно заданных математических ожиданий
![]() ,
(7.3)
,
(7.3)
дисперсий
![]() , (7.4)
, (7.4)
и стационарного относительно нормированной корреляционной матрицы
![]() ,
(7.5)
,
(7.5)
которой соответствует заданная спектральная матрица
![]() .
(7.6)
.
(7.6)
Согласно выражениям (7.3) - (7.6) испытательный сигнал представляется в виде:
 (7.7)
(7.7)
где
![]() - некоррелированные нормированные
случайные процессы с единичной
спектральной плотностью и нулевым
математическим ожиданием (составляющие
“белого шума”);
- некоррелированные нормированные
случайные процессы с единичной
спектральной плотностью и нулевым
математическим ожиданием (составляющие
“белого шума”);
![]() - передаточная
матрица формирующего фильтра;
- передаточная
матрица формирующего фильтра;
![]() - центрированные
и нормированные случайные процессы
с единичным СКО;
- центрированные
и нормированные случайные процессы
с единичным СКО;
![]() - центрированные
случайные процессы, нестационарные
относительно дисперсий
- центрированные
случайные процессы, нестационарные
относительно дисперсий
![]()
Методы и алгоритмы обработки результатов испытаний
Методы и алгоритмы обработки результатов испытаний обеспечивают определение оценок вероятностных характеристик в ДМК как нестационарных случайных процессов.
Методы и алгоритмы управления испытаниями
Методы и алгоритмы управления испытаниями служат для управления процессами испытаний в реальном масштабе времени, т.е. в темпе реальной аппаратуры.