

4.5.2. Алгоритмы обработки внешнетраекторных измерений
4.5.2.1. Система координат и состав измерительной системы
Расчет координат производится в прямоугольной системе координат OXYZ, в которой ось OX направлена горизонтально (обычно оно примерно соответствует направлению движения объекта); ось OY направлена вертикально вверх; ось OZ образует правую систему координат.
Система измерений, служащая для измерения положения движущегося объекта включает в себя:
- теодолиты с устройствами регистрации траектории движущегося объекта (обычно на видеоматрицу) – не менее 2-х;
- систему единого времени;
- устройства вывода угловых координат объекта с видеокарты для формирования массива результатов измерений;
- программа обработки результатов измерений.
Исходными данными являются координаты расположения теодолитов в выбранной системе координат (стартовой).
Схема расположения теодолитов в выбранной прямоугольной (декартовой) системе координат представлена на рисунке 4.16, где введены следующие обозначения:
1, 2 - углы в горизонтальной плоскости (углы азимута) - углы между проекциями оптических осей теодолитов (радиус-векторов «теодолит1 - объект» и «теодолит2 - объект») и вертикальной плоскостью, проходящей через оптические оси теодолитов;
ε1, ε2 - углы в вертикальной плоскости (углы места) – углы между горизонтальной плоскостью и оптическими осями теодолитов, направленных на объект.
З десь
стрелками показаны обычно принимаемые
положительные направления отсчетов
углов в горизонтальной и вертикальной
плоскости.
десь
стрелками показаны обычно принимаемые
положительные направления отсчетов
углов в горизонтальной и вертикальной
плоскости.
4.5.2.2. Определение параметров траектории объекта по внешнетраекторным измерениям
Определение параметров траектории объекта по внешнетраекторным измерениям включает в себя следующие этапы:
- предварительная подготовка данных;
- определение траекторных параметров объекта;
- сглаживание траектории.
Предварительная
подготовка
данных сводится к измерению текущих
угловых координат объекта в выбранной
системе координат OXYZ
(углов
1,
2,
ε1,
ε2)
в процессе
его движения с шагом дискретности
T,
равным периоду видеосъемки. Шаг
дискретности определяется как
![]() ,
где
,
где![]() - частота съемки.
- частота съемки.
В результате такой операции получают массив со значениями угловых координат (на каждый теодолит по два угла , ε). Каждая пара углов соответствует определенному значению времени
![]() ,
,
где t0 – начальный момент времени;
N – количество рассматриваемых кадров съемки;
![]() –шаг изменения
времени.
–шаг изменения
времени.
Определение траекторных параметров объекта
К траекторным параметрам относятся:
- собственно траектория объекта (координаты объекта) и
- ее производные параметры.
А). Определение траектории объекта
Определение траектории движения объекта предполагает определение его координат в принятой системе координат в каждый текущий момент времени его движения.
Простейший способ такого определения в произвольный момент времени заключается в следующем:
- выбирают основной (“А”) и вспомогательный (“B”) теодолиты;
- регистрируют их
положение в выбранной системе координат
(![]() –
координаты основного теодолита,
–
координаты основного теодолита,
![]() – координаты вспомогательного
теодолита);
– координаты вспомогательного
теодолита);
- по углам азимута,
снятым с основного (![]() )
и вспомогательного (
)
и вспомогательного (![]() )теодолитов
в данный момент времени, формируется в
горизонтальной плоскости треугольникАОВ (см.
рис. 4.17);
)теодолитов
в данный момент времени, формируется в
горизонтальной плоскости треугольникАОВ (см.
рис. 4.17);
- из полученного треугольника по известным углам и координатам определяются координаты объекта на горизонтальной плоскости Xо и Zо;
- по полученной
координате Xо
и известному замеренному значению
вертикального угла (угла места объекта
с основного теодолита)
![]() определяется и координатаYо.
определяется и координатаYо.
Соответствующие формулы для определения текущих координат объекта будут иметь вид:
 (4.26)
(4.26)
Справка.
Представленные зависимости (4.26) вытекают из следующих преобразований.

Как следует из изложенного выше, для определения координат движущего объекта по данной методике требуется:
- координаты
теодолитов (все три – для основного
теодолита:![]() ,
,![]() ,
,![]() ;
две координаты на горизонтальную
плоскость – для вспомогательного
теодолита:
;
две координаты на горизонтальную
плоскость – для вспомогательного
теодолита:![]() ,
,![]() );
);
- три угла (угол азимута А и угол места εА - с основного теодолита, и угол азимута В - со вспомогательного теодолита).
Б). Определение производных параметров траектории объекта
К производным параметрам траектории относятся:
- скорость;
- углы наклона вектора скорости в вертикальной и горизонтальной плоскости (углы траектории);
- кинематические осевые и боковые (нормальные) перегрузки движения объекта.
Определение скорости движения объекта
С корость
движения объекта в каждый момент времениti
корость
движения объекта в каждый момент времениti
![]() определяется из следующих выражений:
определяется из следующих выражений:
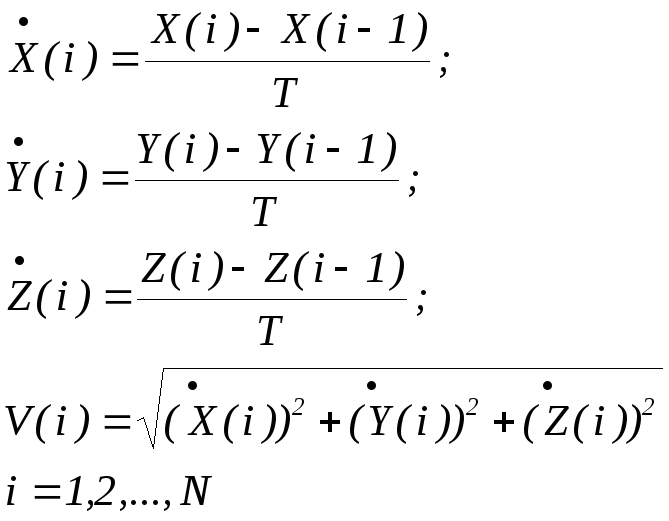 , (4.27)
, (4.27)
где
![]() ,
,![]() ,
,![]() - проекции скорости на соответствующие
осиОХ, ОУ,
OZ
, определяемые в момент времени ti;
- проекции скорости на соответствующие
осиОХ, ОУ,
OZ
, определяемые в момент времени ti;
![]() –шаг изменения
времени.
–шаг изменения
времени.
Определение углов траектории
Углы наклона
вектора скорости в вертикальной
![]() и горизонтальной
и горизонтальной![]() плоскости вычисляются по следующим
зависимостям:
плоскости вычисляются по следующим
зависимостям:
 (4.28)
(4.28)
Определение кинематических осевых и боковых перегрузок
Для вычисления
кинематических осевых
![]() (направленных по вектору скорости) и
нормальных
(направленных по вектору скорости) и
нормальных![]() ,
,![]() (направленных по нормали к вектору
скорости) перегрузок используются
следующие зависимости:
(направленных по нормали к вектору
скорости) перегрузок используются
следующие зависимости:
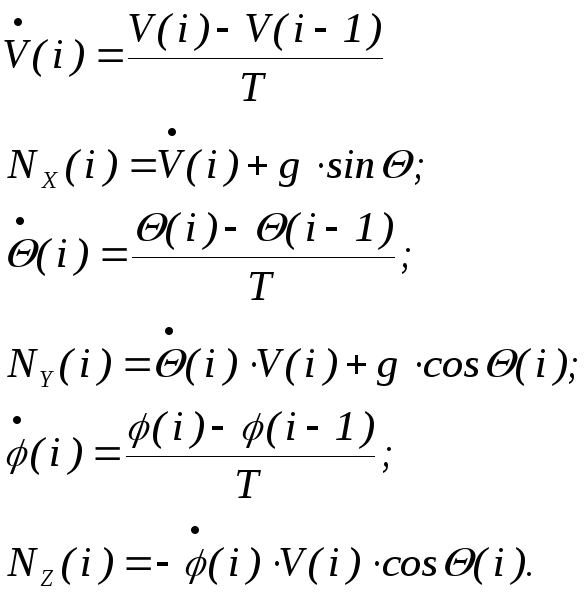 (4.29)
(4.29)
Сглаживание данных
Для уменьшения случайных инструментальных погрешностей теодолита и погрешностей обработки показаний теодолитов производится сглаживание траекторных параметров.
В качестве метода сглаживания может быть использован метод сглаживания полиномами.
Например, в случае использования кубического полинома значения сглаженной функции в данной точке будет определяться по зависимости
![]() ,
(4.30)
,
(4.30)
где p1, p2, p3, p4 - коэффициенты сглаживающего полинома.
В случае необходимости можно получить значение производных данной функции:
![]() .
(4.31)
.
(4.31)
Использование полинома позволяет изменять шаг сглаженной функции, либо выводить значения сглаженной функции в точках, отличных от точек входной функции (сдвиг по аргументу). Это свойство полезно при введении временных поправок угловых координат, либо при определении отсутствующих значений во входной функции, например, когда объект не виден на кадре съемки теодолита.
Выбор степени сглаживания для каждого траекторного параметра j предоставляется пользователю, который определяет коэффициенты сглаживания этих параметров p1-j, p2-j, p3-j, p4-j в зависимости от исходных данных и полученных результатов.
Пример сглаживания функции представлен на рисунке 4.18.
