

geometry24
.pdfРассмотрим механический смысл кривизны.Для натуральной параметризации
r00 = dsdt = kn.Рассмотрим кривую как траекторию движения точки единичной массы |
|||||||||||||||||||||||||||||
в силовом поле.Тогда вектор ускорения |
r00 |
|
равен действующей на точку силе.Имеем |
||||||||||||||||||||||||||
|
|
d2r |
|
d2r |
|
|
|
ds |
|
2 |
|
|
dr d2s |
|
ds |
|
2 |
|
d2s |
||||||||||
a = |
|
|
= |
|
|
· |
|
|
|
+ |
|
|
· |
|
|
= k(s) · |
|
|
|
n + |
|
t, |
|||||||
dt2 |
ds2 |
dt |
|
ds |
dt2 |
dt |
|
dt2 |
|||||||||||||||||||||
d2r |
|
|
|
d2r |
|
|
ds |
|
2 |
|
|
|
ds |
|
|
2 |
|
|
|
|
|
||||||||
|
|
, n = |
|
, n |
|
|
|
|
= (kn, n) |
|
|
= kv2. |
|||||||||||||||||
dt2 |
ds2 |
dt |
|
dt |
|||||||||||||||||||||||||
Кривизна пропорциональна абсолютной величине нормальной составляющей силы и обратно пропорциональна квадрату линейной скорости.Чем больше сила,тем более она искривляет движение,но это влияние тем меньше,чем движение быстрее.
Теорема90.2. Если r = r(t) регулярная параметризация кривой γ ,то для квадрата кривизны этой кривой справедлива формула
k2 = [r0, r00]2 .
(r02)3
Доказательство. Выразим вторую производную вектор-функции r по дуге s через производные по t.Имеем
r0 = r0ss0.
Отсюда
|
|
|
|
|
|
|
|
|
|
|
|
r02 = s02. |
|
|
|
|
|
|
|
|
|||||||
Следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r0 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
rs0 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
= |
p |
|
. |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
r02 |
|
|
|
|
|
|
|
|
||||||||
Дифференцируя это равенство еще раз по t,получаем |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
r00 |
p |
|
|
|
r0 |
|
· 2(r0, r00) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
r0 |
2 |
− |
|
r00r0 |
2 |
− (r0, |
r00)r0 |
|
|
||||||||||||
|
|
|
|
s0 = |
2p |
|
= |
. |
|
||||||||||||||||||
|
|
r00 |
|
|
|
r02 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
ss |
|
|
|
|
|
|
|
r02 |
|
|
|
|
|
|
|
r02pr02 |
|||||||||
Возводя это равенство в квадрат,будем иметь |
|
|
|
|
|
|
|
|
|||||||||||||||||||
r002 |
· |
s02 |
= |
r002r04 + (r0, r00)2r02 − 2r02(r0, r00)2 |
= |
r002r02 − (r0, r00)2 |
. |
||||||||||||||||||||
ss |
|
|
|
|
|
|
|
|
|
r06 |
|
|
|
|
|
|
|
|
|
|
|
r04 |
|||||
Теперь заметим,что |
|
s02 = r02 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
k2 = r002r02 − (r0r00)2 ,
(r02)3
или,что то же самое
k2 = [r0, r00]2 .
(r02)3
Пользуясь определениями и свойствами скалярного,двойного векторного и смешанного произведений векторов,докажем равенство
[r0, r00]2 = r002r02 − (r0r00)2.
[r0, r00]2 = ([r0, r00], [r0, r00]) = (r0, r00, [r0, r00]) = −(r0, [r0, r00], r00) =
= −([r0, [r0, r00]], r00) = −(r0(r0, r00) − r00(r0, r0), r00) = r02r002 − (r0, r00)2.
171
Отсюда для кривизны кривой,заданной уравнениями
|
|
|
|
x = x(t), y = y(t), z = z(t), |
|
|
|
|
|||||||||||||
получаем |
|
|
" |
|
|
" |
2 |
|
2" |
|
|
|
" |
2 |
|
" |
|
|
" |
2 |
|
k |
|
= |
x |
y |
|
y |
z |
|
z |
x |
|
||||||||||
|
x000 |
y000 |
|
+ |
y000 |
2 |
|
|
2 3 |
z000 |
x000 |
. |
|||||||||
|
2 |
|
" |
" |
|
" |
z000 |
" |
|
+ |
" |
" |
|
|
|||||||
|
|
|
" |
|
|
" |
|
(x0 |
" |
+ y0 |
|
+ |
"z0 |
) |
" |
|
|
" |
|
|
|
|
|
|
" |
|
|
" |
|
|
" |
|
|
|
" |
|
|
" |
|
|
" |
|
|
Если кривая плоская и расположена в плоскости xy, то
k2 = (x00y0 − x0y00)2 .
(x02 + y02)3
Если плоская кривая задана уравнением y = y(x), то
y002
k2 = (1 + y02)3 .
Найдем кривизну кривой,заданной уравнением в полярных координатах. Пусть кривая задана уравнением r = r(').Подставим в формулы,выражающие
прямоугольные координаты через полярные
x = r cos ', y = r sin '
выражение r через ',получим
x = r(') cos ', y = r(') sin '.
Данные уравнение можно рассматривать как параметрические уравнения кривой( 'параметр).Тогда
ddx' = ddr' cos ' − r sin ', ddy' = ddr' sin ' + r cos ',
d2x |
|
d2r |
|
dr |
|
d2y |
|
d2r |
|
dr |
|
|
= |
|
cos ' − 2 |
|
sin ' − r cos ', |
|
= |
|
sin ' + 2 |
|
cos ' − r sin '. |
d'2 |
d'2 |
d' |
d'2 |
d'2 |
d' |
||||||
Полученные выражения подставим в формулу для кривизны и получим ее значение:
|r2 + 2r02 − rr00| k = (r2 + r02)3/2 .
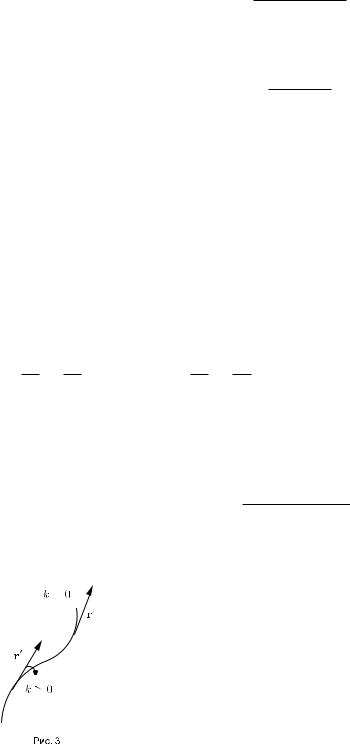
Замечание. Кривизна кривой по определению неотрицательна.Для плоских кривых во многих случаях имеет смысл рассматривать кривизну со знаком,считая ее в одних случаях положительной,в других отрица- 
 тельной.При этом пользуются следующим соображени-
тельной.При этом пользуются следующим соображени-
ем.Касательный вектор r0(t) кривой при движении вдоль кривой в направлении возрастающих t поворачивается.В зависимости от направления вращения вектора r0(t) кри-
визну считают положительной или отрицательной.
Если определить этим условием знак кривизны плоской кривой,то для нее получается формула
172

|
x00y0 |
− |
x00y0 |
или k = |
− |
x00y0 |
− |
x00y0 |
|||||
k = |
|
|
|
3 |
|
|
|
3 |
. |
||||
|
(x02 + y02) |
2 |
|
(x02 + y02) |
2 |
|
|||||||
В частности,для задания кривой уравнением |
y = y(x) |
|
|
||||||||||
k = |
|
y00 |
|
или k = − |
y00 |
|
. |
||||||
(1 + y02)23 |
(1 + y02)23 |
||||||||||||
Найдем теперь все кривые,имеющие в каждой точке кривизну,равную нулю. |
|||||||||||||
Имеем |
|
k = |r00(s)| = 0. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
Отсюда r00(s) = 0 и r(s) = as + b,где |
|
a и b постоянные векторы. |
|||||||||||
Таким образом,кривая,имеющая всюду кривизну,равную нулю,является либо прямой,либо открытым отрезком прямой.Обратное также верно.
Кривизна есть мера отклонения кривой от прямой линии,кривизна которой равна нулю.
§91.Кручение кривой
Пусть P произвольная точка кривой γ и Q точка кривой,близкая к P . Обозначим угол между соприкасающимися плоскостями кривой в точках P и Q, а s длину отрезка P Q кривой.
Определение. Абсолютным кручением | | кривой γ в точке P называется предел отношения s при Q ! P .
Теорема91.1. Регулярная(трижды непрерывно дифференцируемая)кривая в каждой точке,где кривизна отлична от нуля,имеет определенное абсолютное кручение | |.Если r = r(s) естественная параметризация кривой,то
|
|
|
|
|
| |
|
| |
= |
|
|(r0, r00, r000)|. |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
k2 |
|
|
|
|
|
|
|
|||
Доказательство. Если кривизна кривой γ в точке P отлична от нуля,то по непре- |
|||||||||||||||||||
рывности она отлична от нуля в точках,близких к |
P .В каждой точке,где кривизна |
||||||||||||||||||
отлична от нуля,векторы r0 |
и r00 отличны от нуля и не параллельны.Поэтому в каж- |
||||||||||||||||||
дой точке Q,близкой к |
P ,существует определенная соприкасающаяся плоскость. |
||||||||||||||||||
Пусть b(s) и b(s+ |
s) единичные векторы бинормали в точках P и Q кривой |
||||||||||||||||||
γ .Угол равен углу между векторами b(s) и b(s + |
s). |
|
|
||||||||||||||||
Так как |
векторы b(s) и b(s + s) единичные и образуют угол ,то b(s + |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|||
s) − b(s)| = sin |
2 .Поэтому |
|
|
|
|
= 2 sin 2 |
|
|
2 |
|
|
||||||||
|
|
|
|b(s + |
s) − b(s)| |
|
= sin |
. |
||||||||||||
|
|
|
|
|
s |
|
|
|
|
|
s |
|
|
|
|
· |
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
173
Отсюда,переходя к пределу при |
s ! 0,получаем |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
| | = |b0|. |
|
|
|
|
Вектор b0 |
перпендикулярен b,так как bb0 |
= 1 (b2)0 |
= 0.Также он перпендику- |
||||||||||
лярен и t.Действительно, |
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
b0 = [t, n]0 = [t0, n] + [t, n0]. |
|
|
||||
но t0kn,поэтому |
b0 = [t, n0],откуда следует,что |
b0 перпендикулярен t.Таким об- |
|||||||||||
разом,вектор |
b0 |
параллелен вектору n,и,следовательно, |
|||||||||||
|
|
|
|
|
|
|
|
| | = |(b0, n)|. |
|
|
|||
Подставим сюда n = 1 r00 и b = |
[r0,r00] |
,для чего сначала найдем b0 : |
|||||||||||
|
|||||||||||||
|
|
|
|
|
k |
|
|
k |
|
|
|
|
|
b0 = |
|
[r0 |
, r00] |
|
0 = |
k([r00, r00] + [r0, r000]) − k0[r0, r00] |
= |
k[r0, r000] − k0[r0, r00] |
. |
||||
|
|
k |
|
||||||||||
|
|
|
|
k2 |
|
|
k2 |
||||||
Теперь воспользуемся полученным равенством:
|(b0, n)| = k13 ·|(k[r0, r000]−k0[r0, r00], r00)| = k13 ·|k(r0, r000, r00)−k0(r0, r00, r00)| = k12 |(r0, r00, r000)|.
Таким образом,
| | = |(r0, r00, r000)|.
k2
Определим теперь кручение кривой.
Из параллельности векторов b0 и n следует,что при движении вдоль кривой в сторону возрастающих s соприкасающаяся плоскость кривой поворачивается около касательной к кривой.В связи с этим кручение кривой определяется равенством
= ±| |
и знак (+),если вращение касательной плоскости происходит в направлении от b к n, и (−), если вращение происходит в направлении от n
к b.
Определив так кручение кривой,будем иметь = (b0, n) или
= −(r0, r00, r000).
k2
Найдем выражение для кручения кривой в случае любой регулярной параметризации r = r(t).Имеем
r0s = r0t0, r00ss = r00(t0)2 + r0t00, r000sss = r000(t0)3 + {r0, r00},
где {r0, r00} линейная комбинация векторов r0 и r00 .Подставляя найденные выражения для r0s , r00ss и r000sss в формулу для и замечая,что t02 = r102 ,получим
= −(r0, r00, r000).
174
Найдем теперь все кривые,у которых в каждой точке кручение равно нулю. Имеем
= (b0, n) = 0.
Так как,кроме того (b0, t) = 0 и (b0, b) = 0, то b0 = 0, b = b0 = const.
Векторы t и b перпендикулярны.Поэтому (r0, b0) = 0.Отсюда (r, b0)0 = 0. Следовательно, (r, b0) = const,т.е.радиус-вектор любой точки кривой удовлетворяет уравнению плоскости.В этой плоскости и лежит кривая.
Итак,кривая,у которой кручение в каждой точке равно нулю,плоская.Обратное тоже верно.
Тем самым,кручение кривой характеризует ее отличие от плоской кривой.
175

ЛЕКЦИЯ27.ФОРМУЛЫ ФРЕНЕ.ЭВОЛЮТА
§92.Формулы Френе.Натуральные уравнения кривой
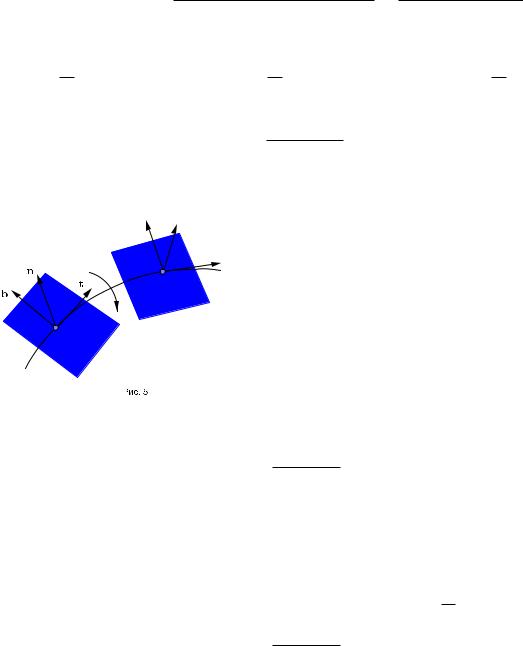
Три луча,исходящие из точки кривой и имеющие направления векторов t, n, b, являются ребрами трехгранного угла.
Определение. Этот трехгранный угол называется естественным трехгранником.
При исследовании свойств кривой в окрестности произвольной точки P во многих случаях оказывается удобным выбрать прямоугольную систему координат,приняв точку P кривой за начало координат,а оси естественного трехгранника за оси координат.Далее получим уравнение кривой при таком выборе системы координат.
Выразим производные векторов t, n, b по дуге кривой через сами векторы t, n, b. Имеем
t0 = r00 = kn.
Вектор b0 параллелен n и b0n = .Отсюда
b0 = n.
Наконец
n0 = [b, t]0 = [b0, t] + [b, t0] = [ n, t] + [kb, n] = −(kt + b).
Формулы
t0 |
= |
kn |
n0 |
= −kt− b, |
|
b0 |
= |
n |
называются формулами Френе8.
Найдем разложение радиус-вектора r(s+ s) в окрестности произвольной точки P ,соответствующей дуге s,по осям естественного трехгранника в этой точке.Имеем
|
|
|
|
|
|
s2 |
|
s3 |
|
|
||||
r(s + |
s) = r(s) + |
sr0 + |
|
r00 + |
|
|
|
r000 + . . . |
||||||
|
6 |
|||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
||||
Но в точке 0 r = 0, r0 = t, r00 = kn, |
r000 = k0n − k2t − k b, . . . и т.д.Таким образом, |
|||||||||||||
r(s + s) = |
s − |
k2 s3 |
+ . . . t + |
k s2 |
+ |
k0 |
s3 |
+ . . . n+ |
||||||
6 |
2 |
|
6 |
|||||||||||
|
|
+ − |
k s3 |
+ . . . b. |
|
|
|
|
|
|
||||
|
|
6 |
|
|
|
|
|
|
||||||
Отсюда,принимая касательную,главную нормаль и бинормаль за оси x, y, z прямоугольной системы координат,получаем уравнение кривой,отнесенное к осям естественного трехгранника
x = |
s − |
|
k2 s3 |
+ . . . , |
|||||
6 |
|||||||||
y = |
k s2 |
|
+ |
|
k0 |
s3 |
+ . . . , |
||
|
|
|
|
||||||
|
|
2 |
|
6 |
|
|
|||
z = − |
k |
|
s3 |
|
|
||||
|
|
+ . . . |
|
||||||
6 |
|
|
|||||||
8Жан Фредерик Френе(1816–1900) французский математик,астроном и метеоролог.
176

Проекции кривой на плоскости естественного трехгранника в окрестности его вершины задаются соответствующими парами этих уравнений.Вид проекций при k, 6= 0 показан на рисунке.
Для дальнейшего нам понадобится теорема из курса дифференциальных уравнений.
Теорема92.1. Рассмотрим систему линейных дифференциальных уравнений
|
dy1 |
= a11y1 + a12y2 + . . . + a1nyn + f1, |
|
|
dx |
|
|
|
|
|
|
|
dy2 |
= a21y1 + a22y2 + . . . + a2nyn + f2, |
|
|
dx |
(1) |
|
. . . |
|
|
|
|
dyn |
= an1y1 + an2y2 + . . . + annyn + fn, |
|
|
dx |
|
|
|
|
|
|
где функции aij, fj непрерывны по x при x 2 [x1, x2].Тогда система(1)имеет
единственное решение y1(x),0y2(0x), . . . ,0yn(x),принимающее при x = |
x0 2 (x1, x2) |
любые начальные значения y1 , y2 , . . . , yn . |
|
Это решение существует на всем отрезке [x1, x2]. |
|
Коэффициенты разложения функции r(s + s) в ряд по степеням |
s выража- |
ются только через кривизну и кручение кривой.Это дает основание полагать,что кривизна и кручение в какой-то мере определяют кривую.И действительно,имеет место
Теорема92.2. Пусть k(s) и (s) любые регулярные функции,причем k(s) > 0. Тогда существует,и притом единственная,с точностью до положения в пространстве,кривая,для которой k(s) является кривизной,а (s) кручением в точке,соответствующей дуге s.
Доказательство. Если кривая,существование которой утверждается в теореме, действительно существует,то единичные векторы касательной,главной нормали и бинормали этой кривой t(s), n(s), b(s) удовлетворяют системе дифференциальных
уравнений |
|
8 00 |
= |
k |
, |
|
|
|
|
= |
k , |
|
|
|
|
< 0 |
= − |
− |
|
|
в силу формул Френе. |
: |
|
|
|
|
|
Естественно поэтому при разыскании интересующей нас кривой обратиться к |
||||||
решениям этой системы. |
|
|
|
|
|
|
Пусть (s), (s), (s) решение этой системы,удовлетворяющее начальным |
||||||
условиям:при s = s0 , = 0 , = 0 , = 0 ,где |
0, 0, 0 три единичные взаимно |
|||||
перпендикулярные вектора,смешанное произведение которых |
( 0, 0, 0) = 1. |
|||||
Покажем,что |
векторы |
(s), (s), (s) |
единичные и |
взаимно перпенди- |
||
кулярные при |
любом s |
и ( (s), (s), (s)) = 1.Для |
этого вычислим |
|||
177

( 2)0, ( 2)0, ( 2)0, ( , )0, ( , )0, ( , )0 .Используя уравнения системы,для этих производных получаем следующие выражения:
( 2)0 |
= 2k( , ), |
( , )0 |
= k 2 − k 2 − ( , ), |
( 2)0 |
= −2k( , ) − 2 ( , ), |
( , )0 |
= 2 − 2 − k( , ), |
( 2)0 |
= 2 ( , ), |
( , )0 |
= k( , ) + ( , ). |
Рассматривая эти равенства как систему дифференциальных уравнений относительно ( 2), ( 2), ( 2), ( , ), ( , ), ( , ),замечаем,что она удовлетворяется значениями2 = 1, 2 = 1, 2 = 1, ( , ) = ( , ) = ( , ) = 0.С другой стороны,эта система удовлетворяется значениями 2 = 2(s), 2 = 2(s), . . . , ( , ) = ( (s), (s)).Оба эти решения совпадают при s = s0 ,а следовательно,по теореме о единственности решения,совпадают тождественно.Тем самым,для всех s
2(s) = 1, 2(s) = 1, . . . , ( , ) = 0.
Покажем,что ( (s), (s), (s)) = 1.Так как , , единичные взаимно перпендикулярные векторы,то ( , , ) = ±1.Смешанное произведение ( , , ) непрерывно зависит от s,при s = s0 оно равно1,поэтому оно равно1для всех s.
Рассмотрим теперь кривую γ ,определяемую векторным уравнением
Z s
r = |
(s)ds. |
|
s0 |
Параметризация кривой γ естественная.В самом деле,длина дуги отрезка s0s кри-
вой γ равна |
Z s |
Z s |
|
|r0(s)|ds = | (s)|ds = s − s0.
|
|
|
|
|
s0 |
|
|
s0 |
|
|
|
|
|
Кривизна кривой γ равна |r00(s)| = | 0(s)| = k(s).Кручение кривой |
γ равно |
||||||||||||
− |
(r0 |
, r00, r000) |
= |
− |
( , k , k0 + k 0) |
= |
− |
( , k , k0 + k(−k − )) |
= (s). |
||||
|
|
|
k2 |
|
|||||||||
|
k2 |
|
|
k2 |
|
|
|
||||||
Таким образом,кривая |
γ имеет в точке,соответствующей дуге |
s,кривизну k(s) |
|||||||||||
и кручение (s). |
|
|
|
|
|
|
|
|
|
|
|||
Существование кривой доказано.Докажем единственность. |
|
|
|
||||||||||
Пусть γ1 и γ2 две кривые,которые в точках,соответствующих дуге |
s,имеют |
||||||||||||
одинаковые кривизны k(s) |
и кручения (s).Совместим кривые |
γ1 и γ2 |
точками, |
||||||||||
соответствующими дуге s0 и естественными трехгранниками в этих точках.Пусть t1, n1, b1 и t2, n2, b2 единичные векторы касательных,главных нормалей и бинормалей кривых γ1 и γ2 соответственно.
Тройки вектор-функций t1(s), n1(s), b1(s) и t2(s), n2(s), b2(s) являются решениями системы для , , .Начальные значения этих решений совпадают.Отсю-
да следует,что решения совпадают тождественно.В частности t1(s) t2(s) или r01(s) r02(s).Интегрируя это равенство в пределах s0, s,получим:
r1(s) r2(s).
Таким образом,кривая γ2 отличается от γ1 только положением в пространстве. Определение. Система равенств
k = k(s), = (s)
называется натуральными уравнениями кривой.
178

По доказанной теореме,кривая натуральными уравнениями определяется однозначно с точностью до движения.
§93.Эволюта плоской кривой
Определение. Эволютой9 плоской кривой называется огибающая ее нормалей.
Пусть регулярная кривая γ без особых точек задана естественной параметризацией r = r(s), s 2 (a, b).Как известно,уравнение нормали в произвольной точке
кривой имеет вид
(R − r(s), r0(s)) = 0.
Поэтому нормали данной кривой образуют однопараметрическое семейство прямых,где s параметр.Продифференцируем это соотношение по параметру s.Тогда с учетом равенства |r0(s)| = 1 получаем систему уравнений для определения огибающей указанного семейства
(R − r, r0) = 0, (R − r, r00) = 1,
но r0(s) = t(s), r00(s) = k(s)n(s).Поэтому R−r?t.С другой стороны, t ортогонален вектору n,следовательно, n коллинеарен вектору R − r.Тогда для некоторого λ справедливо равенство
R − r(s) = λn(s).
Найдем соответствующее значение λ.Для этого заметим,что
(R − r(s), k(s)n(s)) = 1,
и тогда имеем (λk(s)n, n) = 1,откуда получаем λ = 1/k(s) = p(s).
Определение. Величина p(s),обратная кривизне кривой,называется радиусом кри-
визны.
Таким образом,радиус-вектор R произвольной точки эволюты плоской кривой вычисляется по формуле
R= r(s) + p(s)n(s),
асама эта точка называется центром кривизны. Пусть γ плоская кривая, P точка на ней.
Определение. Окружность ! ,проходящая через точку P ,называется соприкасающейся окружностью кривой γ в точке P ,если кривая в этой точке с окружностью имеет соприкосновение второго порядка.
Теорема93.1. |
Радиус соприкасающейся окружности кривой γ ,заданной уравне- |
нием r = r(t) |
в точке t0 равен 1/k(t0),где k(t0) кривизна кривой γ в точке |
t0 . |
|
Доказательство. Пусть ! соприкасающаяся окружность в точке M(x0, y0) кривой γ .Ее уравнение имеет вид
(x − a)2 + (y − b)2 = R2,
9Понятия эволюты и эвольвенты ввел голландский физик,механик,математик,астроном и изобретатель Христиан Гюйгенс(1629–1695).
179
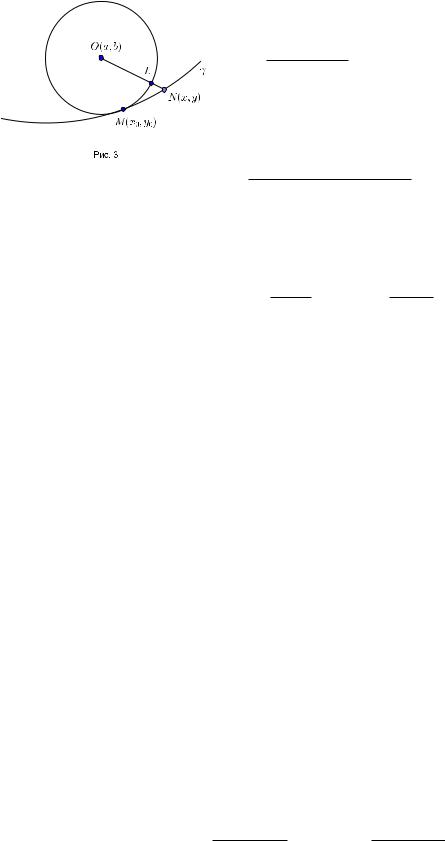
где O(a, b) центр окружности,а R ее радиус.Пусть N(x, y) точка кривой γ , достаточно близкая к точке M ,соответствующая значению параметра t.Пусть L точка пересечения соприкасающейся окружности и отрезка ON (рис. 2).
Расстояние от точки N кривой γ до окружности ! равно LN = ON − OL.Относительно t − t0 оно является бесконечно малым того же порядка,что и ON2 − OL2 ,поскольку
ON2 − OL2 = ON + OL ! 2R при t ! t0.
ON − OL
При этом расстояние MN при N ! M имеет порядок t − t0 :
|MN| = |r(t)−r(t0)| = |r0(t0)(t−t0)+"(t0, t−t0)(t−t0)|.
p
Поскольку |OL| = R, |ON| = (x(t) − a)2 + (y(t) − b)2 ,рассмотрим функцию
'(t) = |ON|2 − |OL|2 = (x(t) − a)2 + (y(t) − b)2 − R2.
Разложим '(t) в ряд Тейлора в окрестности точки t0 :
'(t) = '(t0) + '0(t0)(t − t0) + '00(t0)(t − t0)2 + '000(t0)(t − t0)3 + . . .
2! 3!
Для того чтобы окружность ! была соприкасающейся окружностью кривой γ в точке M ,необходимо и достаточно,чтобы функция '(t) была бесконечно малой не ниже третьего порядка при t ! t0 .Для выполнения последнего условия необходимо и достаточно,чтобы выполнялись равенства
'(t0) = 0, '0(t0) = 0, '00(t0) = 0,
откуда получаем
'(t0) = (x0 − a)2 + (y0 − b)2 − R2 = 0,
'0(t0) = 2[x00(x0 − a) + y00 (y0 − b)] = 0,
'00(t0) = 2[x000(x0 − a) + y000(y0 − b) + x002 + y002] = 0.
Рассматривая последние два уравнения как систему линейных уравнений относительно (x0 − a), (y0 − b),находим
0 |
x02 |
+ y02 |
|
0 |
x02 |
+ y02 |
00 |
0 |
00 |
0 |
|
0 |
0 |
|
0 |
0 |
|
||||||
x0 − a = y0 |
|
|
, b − y0 |
= x0 |
|
|
, (x0y0 |
− y0 x0 |
6= 0). |
||
x000y00 |
− y000x00 |
x000y00 |
− y000x00 |
||||||||
Подставим найденные значения в первое уравнение:
|
2 |
|
2 |
|
2 |
|
|
(x02 |
+ y02)3 |
1 |
|
|
R |
= (x0 − a) |
+ (y0 − b) |
= |
|
0 |
0 |
= |
|
. |
|||
|
|
|
(x000y00 |
− y000x00 )2 |
k2(t0) |
|||||||
Теорема доказана.
Следствие93.1. Уравнение эволюты кривой γ в случае произвольной параметризации x = x(t), y = y(t) имеет вид
X = x − y0 x02 + y02 , Y = y + x0 x02 + y02 .
x0y00 − x00y0 x0y00 − x00y0
180