

1.6. Скорость.
Для характеристики направления и быстроты движения точки вводится векторная физическая величина-скорость.
Пусть
за произвольное время
![]() точка переместилась из т.1 в т.2. Вектор
перемещения
точка переместилась из т.1 в т.2. Вектор
перемещения
![]() представляет собой приращение
радиуса-вектора
представляет собой приращение
радиуса-вектора
![]() за время
за время
![]()
![]() .
Отношение
.
Отношение
![]() называется средней скоростью точки
называется средней скоростью точки
![]() за время
за время
![]() или скоростью перемещения. Направление
вектора
или скоростью перемещения. Направление
вектора
![]() совпадает с перемещением
совпадает с перемещением
![]() .
.
Скорость
![]() точки в заданный момент времени, т.е.,
мгновенная скорость, определяется как
предел отношения
точки в заданный момент времени, т.е.,
мгновенная скорость, определяется как
предел отношения
![]() при
при
![]() ,
,
![]()
т.е.
равна производной от радиуса-вектора
![]() по времени и направлена по касательной
к траектории в заданной точке в сторону
ее движения. Модуль скорости
по времени и направлена по касательной
к траектории в заданной точке в сторону
ее движения. Модуль скорости
![]() .
Вектор
.
Вектор
![]() можно разложить по базису
можно разложить по базису
![]() ,
т.е., на три составляющие по осям декартовой
системы координат
,
т.е., на три составляющие по осям декартовой
системы координат
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
1.7. Ускорение. Нормальное и тангенциальное ускорения.
Движение
точки характеризуется также
ускорением—быстротой изменения
скорости. Если скорость точки за
произвольное время
![]() изменяется на величину
изменяется на величину
![]() ,
то величина
,
то величина
![]() называется
средним ускорением точки за это время.
Ускорение в данный момент времени:
называется
средним ускорением точки за это время.
Ускорение в данный момент времени:
![]() ;
;
![]()
т.е.
вектор
![]() равен производной
равен производной
![]() по времени. Направление вектора
по времени. Направление вектора
![]() совпадает с направлением приращения
скорости
совпадает с направлением приращения
скорости
![]() за
за
![]() .
Поскольку,
.
Поскольку,
![]() ,
то ускорение точки можно записать как
вторую производную по времени от
радиуса-вектора:
,
то ускорение точки можно записать как
вторую производную по времени от
радиуса-вектора:
![]() ;
;
Вектор
ускорения можно разложить по компонентам
:
![]() ;
где
;
где
![]() ,
соответственно,
,
соответственно,
![]() …проекции
ускорения на оси координат.
…проекции
ускорения на оси координат.
Если
траектории точки плоская кривая, то для
описания движения можно выбрать два
перпендикулярные друг к другу направления:
касательной к траектории (орт
![]() )
и нормали к ней (орт
)
и нормали к ней (орт
![]() ).
Тогда
).
Тогда
![]() раскладывается по составляющим
раскладывается по составляющим
![]() .
.
Поскольку
вектор скорости
![]() ,
то подставив сюда элементарное перемещение
,
то подставив сюда элементарное перемещение
![]() ,
получим для скорости:
,
получим для скорости:
![]() .
.
Тогда для ускорения точки можно записать:
![]() ;
;
Из
рис. видно, что
![]() есть разность векторов
есть разность векторов
![]() и
и
![]() .
Видно, что
.
Видно, что
![]() есть приращение орта касательной к
траектории, соответствующее элементарному
пути
есть приращение орта касательной к
траектории, соответствующее элементарному
пути
![]()
![]() за время
за время
![]() .
.
В 0
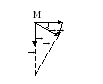
![]() его можно считать совпадающим с дугой
окружности радиуса
его можно считать совпадающим с дугой
окружности радиуса
![]() с центром в т.0 с центральным углом
с центром в т.0 с центральным углом
![]() .
.
При
перемещении по траектории на длину
![]() единичный вектор
единичный вектор
![]() поворачивается на угол
поворачивается на угол
![]() .
Из равнобедренного треугольника векторов
.
Из равнобедренного треугольника векторов
![]() ,
ввиду малости
,
ввиду малости
![]() ;
;
По
направлению
![]() совпадает с ортом
совпадает с ортом
![]() :
при
:
при
![]() вектор
вектор
![]() становится перпендикулярным
становится перпендикулярным
![]() .
Тогда производная:
.
Тогда производная:
![]() и
полное ускорение точки
и
полное ускорение точки
![]() ;
;
Отсюда
видно, что
![]() —
касательное (тангенциальное) ускорение
характеризует быстроту изменения модуля
скорости. При ускоренном движении
—
касательное (тангенциальное) ускорение
характеризует быстроту изменения модуля
скорости. При ускоренном движении
![]() и
и
![]() совпадает с
совпадает с
![]() ,
при замедленном
,
при замедленном
![]() и
и
![]() противоположно
противоположно
![]() .
.
Нормальное
ускорение
![]() характеризует быстроту изменения
направления вектора скорости. Оно
направлено к центру кривизны траектории;
характеризует быстроту изменения
направления вектора скорости. Оно
направлено к центру кривизны траектории;
![]() ;
поэтому его также называют
центростремительным. При прямолинейном
движении
;
поэтому его также называют
центростремительным. При прямолинейном
движении
![]() .
.
М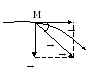 одуль
полного ускорения
одуль
полного ускорения
![]() ;
;
При
ускоренном движении угол
![]() острый, рис. , при замедленном - тупой (
острый, рис. , при замедленном - тупой (![]() угол между
угол между
![]() и
и
![]() ).
Если точка движется по окружности
равномерно, т.е.
).
Если точка движется по окружности
равномерно, т.е.
![]() ,
то
,
то
![]() и
и
![]() ,
т.е. перпендикулярно касательной к
траектории.
,
т.е. перпендикулярно касательной к
траектории.