

Камерна частина
У камерній частині (рис. 4.35) розташовані реєстраційні механізми (лічильник циклів і годинник), механізми підйому столу 8, блок реле і електроблок.
Для поліпшення експонування шкал реєстраційних приладів та пластини з номером АФА і фокусною відстанню в камері встановлений спеціальний затвор 11 із пластинчастою пружиною 14. Він має приводний механізм від окремого електромагніта. Затвор реєстраційних приладів забезпечує визначену витримку (0,1 с).

Рис. 4.35. Кінематична схема аерофотоапарата А-54
Лампи підсвічування включені постійно, тим самим забезпечується постійна температура накалювання (сила світла) ламп. У залежності від чутливості аероплівки перемикачем установлюється відповідне розжарення лампи.
Механізм підйому й опускання столу касети складається з електродвигуна М4 і редуктора 8 зі штовхальником.
Об’єктивна частина
В об'єктивній частині розташовані об'єктив, затвор, механізм діафрагми, механізм введення виправлення на дефокусировку об'єктива з датчиком висоти і механізм оптичної компенсації зрушення зображення.
Об'єктив. В аерофотоапараті А-54/75-2М встановлений об'єктив "Ленінград 8-2М", в аерофотоапараті А-54/100-2М встановлений об'єктив "Ленінград 7-2М".
Між лінзами встановлені аерофотозатвор 32 і ірисова діафрагма 33. Задні лінзи об'єктива рухливі і можуть переміщатися уздовж осі об'єктива вручну за допомогою рукоятки 25 введення виправлень у механізм дефокусировок, або за допомогою електродвигуна М7 механізму дефокусировки об'єктива.
Діафрагма 33 (ірисова) розташована між ламелями затвора 32 і задніх лінз об'єктива 38. Зміна діафрагми здійснюється за допомогою електродвигуна МЗ і редуктора 59.
Механізм введення виправлення на дефокусировку об'єктива призначений для компенсації зміни величини фокусної відстані.
Усі види дефокусировок об'єктива усуваються шляхом введення виправлень за допомогою спеціального механізму.
Тиск, що визначає коефіцієнт переломлення світлових променів у повітряному середовищі об'єктива, і висота (дистанція) фотографування однозначно визначаються статичним тиском на висоті польоту. Тому, як чуттєвий елемент в автоматичному регуляторі застосований блок анероїдів, розміщений в об'єктиві.
Схема автоматичного пристрою уведення виправлення на дефокусировку від тиску показана на рис.4.36.
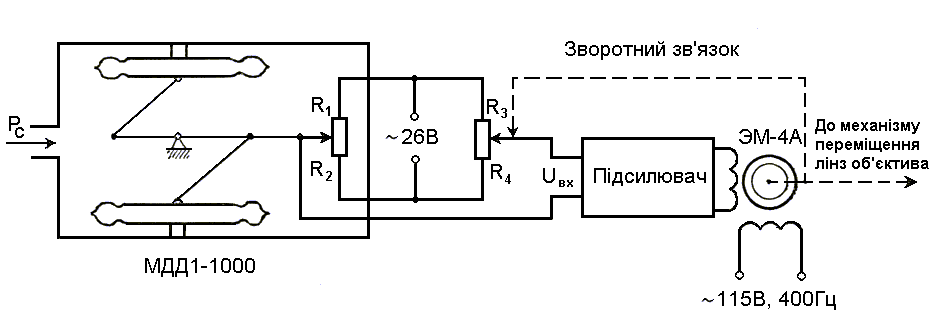
Рис. 4.36. Схема автоматичного пристрою уведення виправлення на дефокусировку
Блок датчика МДД1-1000 складається з двох анероїдів, передавального механізму і потенціометра R1-R2, що разом з потенціометром зворотного зв'язку R3-R4 утворюють мостову схему.
Зміна тиску повітряного середовища Pc, що викликає дефокусировку об'єктива, приводить до розбалансу мостової схеми і появі напруги Uвх на вході підсилювача. Вихідний сигнал надходить на обмотку управління двофазного двигуна ЭМ-4А – М7 (рис. 4.З5), що за допомогою приводного механізму переміщає лінзи об'єктива й одночасно по лінії жорсткого зворотного зв'язку відновлює балансування моста.
Зміна сумарної величини дефокусировки при одночасній зміні тиску і відстані до об'єктів, що фотографуються, компенсується спеціальним потенціометром (R1-R2). Опір цього потенціометра розраховано так, що зміна напруги на потенціометрі відповідає визначеній величині зсуву об'єктива, необхідній для компенсації сумарної дефокусировки.
При заміні типу (сорту) аероплівки необхідно вводити відповідні виправлення в механізм дефокусировки. Уведення виправлень здійснюється рукояткою, установленою на корпусі АФА – 25 (рис. 4.35). При обертанні рукоятки задня лінза об'єктива додатково переміщається відповідно до типу аероплівки.
Для запобігання дефокусировки за причиною температурних змін корпуса АФА прикладна рамка камери з'єднана з об'єктивом спеціальними температурно-компенсаційними стрижнями, що забезпечують постійну величину відстані від об'єктива до фокальної площини камери (рис. 4.37).

Рис. 4.37. До пояснення дії температурно-компенсаційних стрижнів
Стрижні виконані з інвару, що має практично нульовий температурний коефіцієнт лінійного розширення.
Щоб зменшити вплив температурних перепадів на об'єктив, корпус об'єктива оснащений тепловою ізоляцією. Для зменшення теплового контакту об'єктива з корпусом АФА між ними вмонтована прокладка з текстолітового кільця, що виконує роль теплоізолятора.
Аерофотозатвор 32 (рис. 4.35) типу "жалюзі" виконаний окремим вузлом із самостійним електричним приводом від електромеханізму М5 (МУФ-5), що забезпечує взведення робочих пружин затвора. Спуск затвора здійснюють робочі пружини 45 при спрацьовуванні електромагніта ЭМ1, що одержує імпульс струму від вузла оптичної компенсації зрушення зображення в момент, коли швидкість відхилення оптичних променів буде дорівнювати швидкості відносного руху оптичного зображення.
Затвор пропускає світловий потік, коли його прямокутні пластини (ламелі) 41 одночасно перекидаються на 180° за допомогою зубцюватої рейки 42 і шестірень, укріплених на осях ламелей.
Для запобігання різких ударів частин затвора у момент його спуску існує механізм, якій демпфірує, що складається з двох дисків 50, пружин і водила 43. Водило вдаряє по дисках раніш, ніж ударяються один об одного ламелі.
Механізм спуску затвора кінематично зв'язаний з механізмом зміни витримок, що має привод від двигуна М2.
Для зміни величини витримок до рухомих частин аерофотозатвору підключаються додаткові інерційні маси через кулісний механізм 51 з різним передаточним числом. Зміна передаточного числа кулісного механізму виконується електродвигуном М2.
Механізм оптичної компенсації зсуву зображення складається з двох оптичних клинів 61 і 62, одночасно виконуючих роль світлофільтрів, редуктора й електродвигуна М1. Швидкість обертання оптичних клинів для компенсації руху оптичного зображення повинна бути пропорційна співвідношенню Vп/H.
На рис. 4.38 показана схема автоматичного регулювання швидкості двигуна привода оптичних клинів по сигналах uVп = k1Vп і u = k2H. Необхідні вихідні сигнали, пропорційні шляховій швидкості і висоті польоту Н літака, надходять від барометричних чи навігаційних приладів.
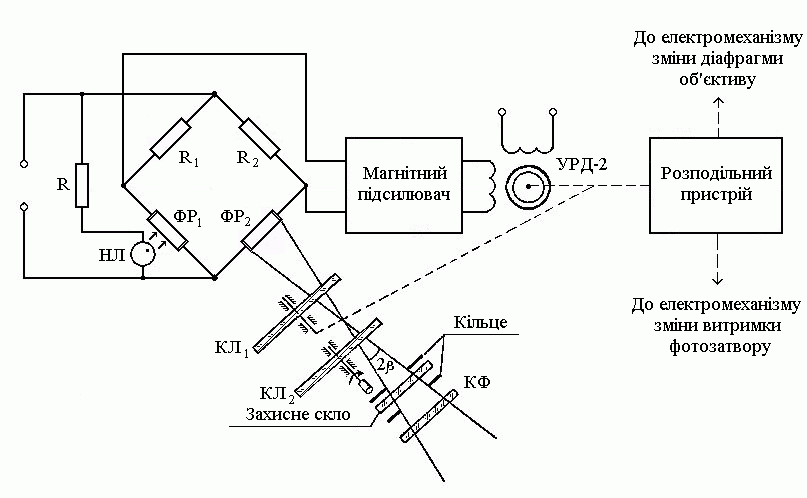
Рис. 4.38. Схема автоматичного регулювання швидкості двигуна
привода оптичних клинів
У блоці розподілу 6 (рис. 4.34), зібраного за схемою на потенціометрах, безупинно формується керуючий сигнал u = kVп/H. Після вібраційного перетворення в частоту 400 Гц і посилення сигнал надходить на обмотку керування двофазного двигуна, що обертає оптичні клини, а також тахогенератор ТГ постійного струму. Напруга тахогенератора, пропорційна швидкості обертання вала двигуна, у якості негативного зворотного зв'язку сумується з управляючим сигналом на вході перетворювача.
Для забезпечення синхронізації спрацьовувань фотозатвора з періодами часу, коли існує компенсація зсуву зображення, кулачковий датчик сигналів, що подаються на спуск фотозатвора 68, з'єднаний з механізмом оптичної компенсації.
Інтервал фотографування і величина перекриття аерознімків також залежить від величини співвідношення Vп/H. У залежності від того, який контакт кулачкового датчика підключений перемикачем, спуск затвора відбувається з урахуванням 20% чи 60% перекриття, при цьому:
при одному маршруті і 20%-му перекритті на зйомку (на спуск затвора) потрібно подавати імпульси при кожному четвертому обороті оптичного клина;
при одному маршруті і 60%-му перекритті, а також при двомаршрутному фотографуванні і 20% перекритті на зйомку вимагається подавати імпульси при кожному другому обороті оптичного клина;
при двомаршрутному фотографуванні і 60% перекритті імпульси на зйомку потрібно подавати при кожному обороті клина.