

7.2. Колебания под действием упругой силы (пружинный маятник)
Пружинный маятник состоит из пружины и массивного шара, насаженного на горизонтальный стержень, вдоль которого он может скользить. Пусть на пружине укреплен шарик с отверстием, который скользит вдоль направляющей оси (стержня). На рис. 7.2,а показано положение шара в состоянии покоя; на рис. 7.2,б - максимальное сжатие и на рис. 7.2,в -произвольное положение шарика.

Под действием возвращающей силы, равной силе сжатия, шарик будет совершать колебания. Сила сжатия F = -kx , где k - коэффициент жесткости пружины. Знак минус показывает, что направление силы F и смещение х противоположны. Потенциальная энергия сжатой пружины
![]() кинетическая
кинетическая ![]() .
.
Для вывода уравнения движения шарика необходимо связать х и t. Вывод основывается на законе сохранения энергии. Полная механическая энергия равна сумме кинетической и потенциальной энергии системы. В данном случае :
![]() .
В
положении б)
.
В
положении б) ![]() :
:
![]() .
.
Так как в рассматриваемом движении выполняется закон сохранения механической энергии, можно записать:
![]() .
Определим
отсюда скорость:
.
Определим
отсюда скорость:
![]() Но
в свою очередь
Но
в свою очередь ![]() и,
следовательно,
и,
следовательно,
![]() .
Разделим
переменные
.
Разделим
переменные .
Интегрируя
это выражение, получим:
.
Интегрируя
это выражение, получим:![]() ,
,
где ![]() -
постоянная интегрирования.
Из последнего
следует, что
-
постоянная интегрирования.
Из последнего
следует, что
|
|
(7.2) |

Сравнивая (7.1) с (7.2), получаем
|
|
(7.3) |
Таким образом, под действием упругой силы тело совершает гармонические колебания. Силы иной природы, чем упругие, но в которых выполняется условие F = -kx, называются квазиупругими. Под действием этих сил тела тоже совершают гармонические колебания. При этом:
|
смещение: |
|
|
скорость: |
|
|
ускорение: |
|
7.3. Энергия колеблющегося тела
Кинетическая энергия:
|
|
(7.4) |
Потенциальная
энергия:
![]()
Учитывая то,
что ![]() т.е.
т.е. ![]() ,
последнее выражение можно записать в
виде:
,
последнее выражение можно записать в
виде:
|
|
(7.5) |
Полная энергия колеблющегося тела равна сумме кинетической и потенциальной энергий
|
|
7.4. Основное уравнение гармонических свободных колебаний. (Дифференциальное уравнение гармонических колебаний)
В случае упругих колебаний возвращающая сила F = -kx. Если нет других сил, кроме упругой силы, то колебания называют свободными. Согласно второму закону Ньютона
![]() ,
или
,
или
![]() .
Разделим
оба слагаемых на m:
.
Разделим
оба слагаемых на m:
|
|
(7.7) |
Последнее соотношение носит название основного уравнения гармонических свободных колебаний. Общее решение этого уравнения имеет вид
 ,
,
в чем легко убедиться подстановкой х в исходное дифференциальное уравнение.
7.5. Математический и физический маятники
Математический маятник.
Математическим маятником называется материальная точка, подвешенная на нерастяжимой невесомой нити, совершающая колебательное движение в одной вертикальной плоскости под действием силы тяжести.
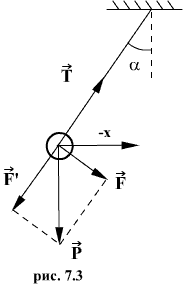
Таким маятником
можно считать тяжелый шар массой m,
подвешенный на тонкой нити, длина l
которой намного больше размеров шара.
Если его отклонить на угол α (рис.7.3.) от
вертикальной линии, то под влиянием
силы F – одной из составляющих веса Р
он будет совершать колебания. Другая
составляющая ![]() ,
направленная вдоль нити, не учитывается,
т.к. уравновешивается силой натяжения
нити. При малых углах смещения
,
направленная вдоль нити, не учитывается,
т.к. уравновешивается силой натяжения
нити. При малых углах смещения ![]() и,
тогда координату х можно отсчитывать
по горизонтальному направлению. Из
рис.7.3 видно, что составляющая веса,
перпендикулярная нити, равна
и,
тогда координату х можно отсчитывать
по горизонтальному направлению. Из
рис.7.3 видно, что составляющая веса,
перпендикулярная нити, равна
![]()
Знак минус в правой части означает то, что сила F направлена в сторону уменьшения угла α. С учетом малости угла α
![]()
Для вывода закона движения математического и физического маятников используем основное уравнение динамики вращательного движения
Момент силы
относительно точки О: ![]() ,
и момент инерции:M
= FL .
Момент
инерции J в
данном случае
Угловое ускорение:
,
и момент инерции:M
= FL .
Момент
инерции J в
данном случае
Угловое ускорение:
![]()
С учетом этих
величин имеем:
![]()
или
|
|
(7.8) |
Его решение
 ,
,
|
где |
(7.9) |
Как видим, период колебаний математического маятника зависит от его длины и ускорения силы тяжести и не зависит от амплитуды колебаний.
Физический маятник.
Физическим маятником называется твердое тело, закрепленное на неподвижной горизонтальной ocи (оси подвеса), не проходящей через центр тяжести, и совершающее колебания относительно этой оси под действием силы тяжести. В отличие от математического маятника массу такого тела нельзя считать точечной.

При небольших углах отклонения α (рис. 7.4) физический маятник так же совершает гармонические колебания. Будем считать, что вес физического маятника приложен к его центру тяжести в точке С. Силой, которая возвращает маятник в положение равновесия, в данном случае будет составляющая силы тяжести – сила F.
![]()
Знак минус в правой части означает то, что сила F направлена в сторону уменьшения угла α. С учетом малости угла α
![]()
Для вывода закона движения математического и физического маятников используем основное уравнение динамики вращательного движения
![]() .
Момент силы: определить в явном виде
нельзя. С учетом всех величин, входящих
в исходное дифференциальное уравнение
колебаний физического маятника имеет
вид:
.
Момент силы: определить в явном виде
нельзя. С учетом всех величин, входящих
в исходное дифференциальное уравнение
колебаний физического маятника имеет
вид:
|
|
(7.10) |
|
|
(7.11) |
Решение этого
уравнения
Определим длину l
математического маятника, при которой
период его колебаний равен периоду
колебаний физического маятника,
т.е. ![]() или
или
![]() .
Из
этого соотношения определяем
.
Из
этого соотношения определяем
![]()
Данная формула определяет приведенную длину физического маятника, т.е. длину такого математического маятника, период колебаний которого равен периоду колебаний данного физического маятника.