

1.6. Ускорение
Ускорение характеризует быстроту изменения скорости, т.е. изменение величины скорости за единицу времени.
Вектор среднего
ускорения.
Отношение приращения скорости ![]() к
промежутку времени
к
промежутку времени![]() ,
в течение которого произошло это
приращение, выражает среднее ускорение:
,
в течение которого произошло это
приращение, выражает среднее ускорение:
![]()
Вектор, среднего
ускорения совпадает по направлению с
вектором ![]() .
.
Ускорение, или
мгновенное ускорение равно
пределу среднего ускорения при стремлении
промежутка времени ![]() к
нулю:
к
нулю:
|
|
(1.13) |
В проекциях на соответствующие координаты оси:
![]()
или
|
|
(1.14) |
1.7. Криволинейное движение. Тангенциальное и нормальное ускорения
При прямолинейном
движении векторы скорости и ускорения
совпадают с направлением траектории.
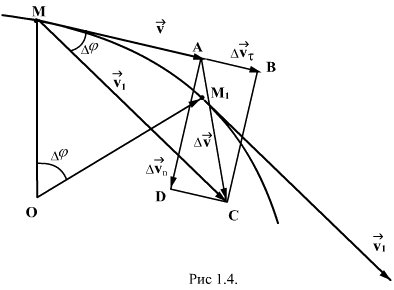
Рассмотрим движение материальной точки
по криволинейной плоской траектории. Вектор
скорости в любой точке траектории
направлен по касательной к ней. Допустим,
что в т.М траектории скорость была ![]() ,
а в т.М1 стала
,
а в т.М1 стала ![]() .
При этом считаем, что промежуток времени
при переходе точки на пути
.
При этом считаем, что промежуток времени
при переходе точки на пути![]() из
М в М1 настолько
мал, что изменением ускорения по величине
и направлению можно пренебречь. Для
того, чтобы найти вектор изменения
скорости
из
М в М1 настолько
мал, что изменением ускорения по величине
и направлению можно пренебречь. Для
того, чтобы найти вектор изменения
скорости ![]() ,
необходимо определить векторную
разность:
,
необходимо определить векторную
разность:
![]()
Для этого
перенесем ![]() параллельно
самому себе, совмещая его начало с точкой
М. Разность двух векторов равна вектору,
соединяющему их концы
параллельно
самому себе, совмещая его начало с точкой
М. Разность двух векторов равна вектору,
соединяющему их концы![]() равна
стороне АС
равна
стороне АС![]() МАС,
построенного на векторах скоростей,
как на сторонах. Разложим вектор
МАС,
построенного на векторах скоростей,
как на сторонах. Разложим вектор![]() на
две составляющих АВ и АД, и обе
соответственно через
на
две составляющих АВ и АД, и обе
соответственно через![]() и
и![]() .
Таким образом вектор изменения
скорости
.
Таким образом вектор изменения
скорости![]() равен
векторной сумме двух векторов:
равен
векторной сумме двух векторов:
![]()
По определению:
|
|
(1.15) |
Тангенциальное
ускорение ![]() характеризует
быстроту изменения скорости движения
по численному значению и направлена по
касательной к траектории.
характеризует
быстроту изменения скорости движения
по численному значению и направлена по
касательной к траектории.
Следовательно
|
|
(1.16) |
Нормальное
ускорение ![]() характеризует
быстроту изменения скорости по
направлению. Вычислим вектор:
характеризует
быстроту изменения скорости по
направлению. Вычислим вектор:
![]()
Для этого проведем
перпендикуляр через точки М и М1 к
касательным к траектории (рис. 1.4) Точку
пересечения обозначим через О. При
достаточно малом ![]() участок
криволинейной траектории можно считать
частью окружности радиуса R. Треугольники
МОМ1 и МВС подобны, потому, что являются
равнобедренными треугольниками с
одинаковыми углами при вершинах. Поэтому:
участок
криволинейной траектории можно считать
частью окружности радиуса R. Треугольники
МОМ1 и МВС подобны, потому, что являются
равнобедренными треугольниками с
одинаковыми углами при вершинах. Поэтому:
![]()
или
![]()
Но ![]() ,
тогда:
,
тогда:
![]()
Переходя к пределу
при ![]() и
учитывая, что при этом
и
учитывая, что при этом![]() ,
находим:
,
находим:
![]() ,
,
|
|
(1.17) |
Так как при ![]() угол
угол![]() ,
направление этого ускорения совпадает
с направлением нормали к скорости
,
направление этого ускорения совпадает
с направлением нормали к скорости![]() ,
т.е. вектор ускорения
,
т.е. вектор ускорения![]() перпендикулярен
перпендикулярен![]() .
Поэтому это ускорение часто называют
центростремительным.
.
Поэтому это ускорение часто называют
центростремительным.
Полное ускорение определяется векторной суммой тангенциального нормального ускорений (1.15). Так как векторы этих ускорений взаимноперпендикулярны, то модуль полного ускорения равен:
|
|
(1.18) |
Направление полного
ускорения определяется углом между
векторам ![]() и
и![]() :
:
![]()
1.8. Методические указания к решению задач по кинематике
Анализируя полученные формулы, в кинематике можно выделить четыре основных типа задач:
1. Общая прямая задача кинематики:
По известной
зависимости радиуса-вектора от
времени ![]() необходимо
определить, векторы скорости
необходимо
определить, векторы скорости![]() и
ускорения
и
ускорения![]() и
их модули v и а, нормальную
и
их модули v и а, нормальную![]() и
тангенциальную
и
тангенциальную![]() составляющую
ускорения, радиус кривизны траектории
R.
составляющую
ускорения, радиус кривизны траектории
R.
2. Общая обратная задача кинематики:
По известным
векторам скорости ![]() или
ускорения
или
ускорения![]() необходимо
восстановить вид траектории, т.е. найти
радиус-вектор
необходимо
восстановить вид траектории, т.е. найти
радиус-вектор![]() ,
а затем все остальные параметры
траектории, указанные в пункте 1.
,
а затем все остальные параметры
траектории, указанные в пункте 1.
3. Частная прямая задача кинематики:
По известной
зависимости пути от времени ![]() необходимо
найти скорость
необходимо
найти скорость![]() и
ускорение
и
ускорение![]() тела.
В этом случае можно определить лишь
модуль скорости и ускорения:
тела.
В этом случае можно определить лишь
модуль скорости и ускорения:
![]() и
и ![]() .
.
Векторы ![]() ,
,![]() ,
,![]() ,
а также
,
а также![]() и
и![]() в
этих задачах не могут быть определены.
в
этих задачах не могут быть определены.
4. Частная обратная задача кинематики:
По известным
зависимостям скорости ![]() или
ускорения
или
ускорения![]() необходимо
восстановить зависимость пути от
времени
необходимо
восстановить зависимость пути от
времени![]() :
:
![]()