

Аналитическое представление электромагнитной обстановки
Согласно статической модели ЭМО, аналитическое представление формируется путем преобразования излучаемых полезных и мешающих сигналов средой их распространения. Если сигнал представить в виде поля излучения с линейной поляризацией, то в некоторой декартовой системе координатX =x, y, z, где аппертура антенны (или плоскость отражения) совмещены с координатной плоскостьюxoy, напряженность поля может быть записана в виде векторной комплексной (аппертурной) функции:
e(x, , ) = X e (x, , ) + Y e (x, , ),
где e, e — аппертурные функции поляризационных составляющих; X, Y — орты системы координат x, y, z; X — координаты текущих точек апертуры (рис. 5.5).
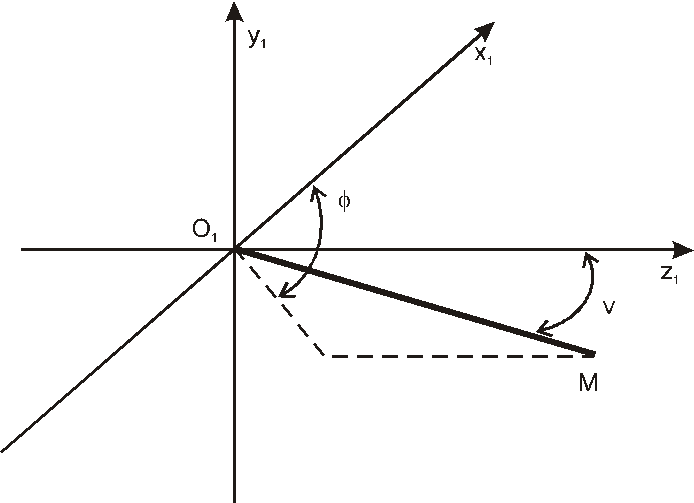
Рис. 5.5.Система координат пространства сигнала излучения
Для типового высокочастотного узкополосного сигнала поляризационные составляющие выражаются в виде
e(X, t, , ) = k E(t, ) E(x, y) A exp[j(t + )],
где E(t, ) — комплексная амплитуда поля излучаемого сигнала с учетом ее модуляции, перекодирующей полезное сообщение в сигнал с существенными параметрами ; E(x, y) — распределение поля в раскрыве антенны; A, — нормированная амплитуда и начальная фаза излучаемого сигнала, соответственно, выступающие как несущественные параметры и зависящие от вида модели сигнала; — круговая частота несущей сигнала; k — поляризационные коэффициенты: k = | е | / | е | — для первой поляризационной составляющей; k = | е | / | е | — для второй (ортогональной к первой) поляризационной составляющей.
Функция Fcреды распространения может быть выражена интегральной операцией, учитывающей переходную характеристику cреды. Таким образом, каждая из поляризационных составляющих поля в месте приема
U (X, t, , ) = h(X – X, t – t) dX dt,
где h(x, y, z, t)— комплексная переходная характеристика среды распространения;X = x, y, z— пространственные координаты поля в месте приема.
Этот интеграл берется по четырехмерной области существования функции e(x, y,z, t, , ). Для среды распространения ее комплексную переходную характеристику можно выразить в виде произведения
h(x, y, z) = h(x, y, z, t) h(x, y, z, t),
где h и h — регулярная и случайная части переходной характеристики среды.
Регулярная часть hопределяется законами электродинамики для свободного пространства. Для данной зоны излучающей антенны она будет
h(x, y, z, t) = exp[j – (t – R/c)] (t – R/c),
где R— дальность распространения сигнала;c— скорость распространения сигнала; = 1/ — множитель ослабления сигнала за счет рассеяния в среде распространения.
Если учесть, что это выражение определяет напряженность поля точечного излучателя, помещенного в центре координат излучающей аппертуры, то ясно, что напряженность поля в точке приема с координатами (x, y, z), обратна пропорциональна дальностиRраспространения сигнала, а набег фазы высокочастотного колебания и задержка сигнала во времени пропорциональны дальности распространения сигнала.
Случайная часть hпереходной характеристики учитывает возникающие при распространении амплитудные и фазовые искажения.
Амплитудные искажения сигнала проявляются в его замираниях либо во флуктуациях при отражении от большого числа отражателей. Они обычно принимаются случайными с распределением по релеевскому закону. Фазовые искажения также принимаются случайными с равномерным распределением плотности вероятности фазы в пределах от 0до2.
Таким образом, типовой для полезного сигнала является модель среды распространения с комплексной случайной частью h, у которой случайный модуль| h |и случайный фазовый угол.
Относительно мешающего сигнала условия распространения изменяются в более широких пределах и имеет три вида.
При распространении непреднамеренной помехи в пределах объекта, когда расстояния между антеннами взаимовлияющих РЭС малы и не изменяются в процессе функционирования РЭС, множитель hявляется постоянным и известным. В этом случае его принимают, без потери общности рассуждений, равным единице.
При рассмотрении локальных группировок со стационарно расположенными РЭС флуктуаций модуля | h |не будет, а фаза(в силу неизвестного с точностью до долей рабочей волны расстояния между РЭС) оказывается случайной.
Для подвижных РЭС и расположенных на больших расстояниях имеют место случайные модуль | h |и фазаслучайной части переходной характеристики. При этом в случае групповой непреднамеренной помехи для каждой отдельной помехи будет своя случайная частьh(1), независимая от случайной части другой одиночной помехи.
Если в выражение для поляризационных составляющих поля в месте приема подставить выражения для e,hиh, то можно определить сигнал на входе антенны приемника в форме
U (x, y, z, t) = kAexp(j) F(v, ) E(t – ) exp[j(t – kR)] ,
где R— расстояние между передатчиком и приемником;k = 2/— волновой множитель; = kR/— временная задержка принимаемого сигнала;F— диаграмма направленности антенны передающего устройства;A— амплитудный множитель, учитывающий| h |;— фазовый множитель, учитывающий.
В соответствии с рис. 5.5, диаграмма направленности выражается как функция сферических координат.
F (, ) = Е(x, y) exp[jk(x sin v cos + y sin v sin )] dx dy,
где (A)— двухмерная аппертура передающей антенны.
Для того чтобы от напряженности поля в месте приема перейти к напряженности на входе приемника, необходимо учесть преобразование электромагнитного поля антенной приемника. Это выполняется с помощью интегрального преобразования с учетом аппертуры Aприемной антенны:
U (t) =;U(x, y, z, t)F (v', ') exp[jk(x sin v' cos ' + y sin ')] dx dy,
где v','— углы в полярной системе координат приемной антенны, под которыми приходит принимаемый сигнал;— коэффициент, равный отношению величины интеграла выражения при текущих значенияхv', 'к величине этого интеграла приv' = ' = 0.
Рассмотренная процедура получения сигнала на входе приемника позволяет учесть особенности излучения сигналов, среды распространения и направленных свойств приемной антенны. Систематизация входных сигналов на основе полученных данных позволяет сформировать модель входного сигнала.
Анализ процесса формирования ЭМО в месте приема полезного сигнала свидетельствует о том, что необходимо учитывать три характерные компоненты:
полезный сигнал;
мешающий сигнал;
внутренние, или собственные, шумы приемника.
Эти три компоненты образуют на входе приемного устройства аддитивную смесь. Рассмотрим возможный вариант одной из поляризационных составляющих с учетом возможных классов сигналов и помех:
U(X, t) = ,
где U(x, t, , ) — полезный сигнал;U(x, t, )— мешающий сигнал, являющийся непреднамеренной помехой;n(x, t)— шумы приемника, пересчитанные ко входу приемника. Условиеi = 0соответствует случаю отсутствия сигнала. Каждый компонент является функцией пространства и времени. При этом входной сигнал рассматривается в пространстве наблюдения, представляющем собой область существования входного сигнала в пространстве, имеющую протяженность по каждой из осей и интервал наблюдения.
Учитывая ограниченные по ширине спектры сигналов и ограниченную ширину полосы пропускания приемника, все три компоненты принимаются узкополосными процессами, причем сигнал и помеха записываются в виде
U(X, t, , ) = Re,
U(X, t, ) = Re,
где ,,— комплексные множители, зависящие от существенных и несущественных параметров сигнала и помехи;U(X, t)иU(X, t)— комплексные пространственно-временные функции модуляции сигнала и помехи;f— несущая частота сигналов, равная частоте настройки приемника.
Необходимо отметить, что комплексные пространственно-временные функции UиUучитывают все пространственные, временные, частотные, поляризационные и энергетические отличия полезных сигналов от мешающих. Полезные сигналы отличаются друг от друга существенно разными значениями параметров.
Для систематизации большого разнообразия видов полезных и мешающих сигналов вводятся типовые модели или типовые виды сигналов. Такими видами сигналов являются: детерминированные,квазидетерминированныеислучайные(сложные). Кроме того, помехи могут быть и групповыми (т.е. состоящими из мешающих сигналов разных видов).
В качестве видового признака типовых моделей сигналов и помех используются амплитуда и начальная фаза.
Детерминированныесигналы и детерминированные помехи имеют неслучайные (известные на приемной стороне) амплитуды и начальные фазы высокочастотных колебаний. Из условия нормирования амплитуды берутся равными единице, а начальные фазы —и, соответственно.
Квазидетерминированныесигнал и помеха имеют случайные амплитуды и (или) начальные фазы. При этом типовым видом являются сигналы со случайными амплитудами и случайными начальными фазами, как характеризующиеся наибольшей степенью случайности в этом виде сигналов и наиболее часто встречающиеся на практике. Однако в отношении мешающих сигналов следует использовать и модель с неслучайной амплитудой и случайной начальной фазой, которая адекватна непреднамеренной помехе, создаваемой при близко расположенных источниках и рецепторах помех. При неслучайной амплитуде ее значение принимается равным единице, а при случайной амплитуде последняя нормируется таким образом, чтобы ее второй начальный момент, являющийся нормирующим множителем мощности (энергии) сигнала, был равен единице.
Случайные сигналы, в отличие от детерминированных и квазидетерминированных сигналов, которые относят к простым сигналам, являются сложными. Они характеризуются наличием последовательности во времени и (или) пространстве ряда квазидетерминированных сигналов. Каждый из таких сигналов называется элементарным и имеет независимые от других элементарных сигналов случайные несущие параметры (амплитуду и начальную фазу). К числу сложных относятся случайные шумовые и шумоподобные сигналы. Дополнительным видом случайных сигналов является групповая помеха, которая представляется суммой накладывающихся друг на друга во времени и (или) пространстве мешающих сигналов первых трех видов.
Таким образом, в векторной форме полезный и мешающий сигналы можно записать в виде:
для модели детерминированных сигнала и помехи
U(X, t) (=) Re,
U(X, t) (=) Re;
для модели квазидетерминированных сигнала и помехи
U(X, t, ) (=) Re,
U(X, t, ) (=) Re;
для модели случайных сигнала и помехи, а также групповой помехи
U(X, t, ) (=)Re,
U(X, t, ) (=)Re,
где (h)— совокупностьhэлементарных сигналов;(=)— знак эквивалентности, что в данном случае соответствует равенству с точностью до постоянного множителя.