

4.2. Механічні системи керування ендоскопом
Для розширення функціональних можливостей ендоскопа і поліпшення його оптико-механічних характеристик в ньому використовуються різні механізми керування, основними з яких є (рисунок 4.2):
- механізм орієнтації, призначений для керування напрямом спостереження за рахунок вигину дистального кінця ендоскопа за допомогою рукояток керування. Залежно від моделі ендоскопа, огляд може здійснюватися в одній площині (вгору - вниз) або в двох площинах (вгору - вниз, вправо - вліво);
- окуляр ендоскопа, що має механізм діоптрійного регулювання;
- механізм юстування вхідного торця освітлювального джгута ендоскопа відносно осі оптичної системи освітлювача, призначений для забезпечення максимальної освітленості досліджуваного об'єкту.

Рис. 4.2. Оптико-механічна схема ендоскопа
4.2.1. Конструкції гнучкої частини ендоскопа
Для забезпечення можливості зміни напряму спостереження в процесі дослідження гнучкі ендоскопи мають керований дистальний кінець, який може згинатися від свого первинного положення під деяким кутом (рисунок 4.3). У деяких моделях кут вигину може перевищувати 200°.
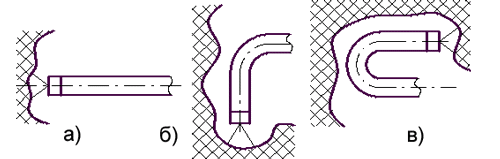
Рис. 4.3. Положення дистального кінця ендоскопа в процесі досліджень: а) вихідне положення дистального кінця ендоскопа; б) дистальний кінець ендоскопа зігнутий вниз на 90°; в) дистальний кінець ендоскопа зігнутий вгору на 180°
Необхідно забезпечити плавну і легку керованість дистального кінця ендоскопа (рисунок 4.4), в якому об'єднуються: об'єктив 1, регулярний джгут 2 для передачі зображення, лінза освітлювального каналу 3, освітлювальний джгут 4, полімерна трубка 6 для подачі рідині при очищенні захисного скла об'єктиву ендоскопа через форсунку 5 або повітря для роздмухування досліджуваної внутрішньої порожнини з метою розпрямлення складок стінок порожнини, гнучкі зчленування 9, тонкі металеві троси керування 10, що виконують роль тяги при вигині дистального кінця, поміщені в гнучкі металеві оболонки 11 - боудени (спіральні пружини з дроту, навиті впритул). У операційних ендоскопах передбачений канал 7 для введення хірургічного інструменту по полімерній трубці 8. Дистальний керований кінець ендоскопа кріпиться до тубуса.
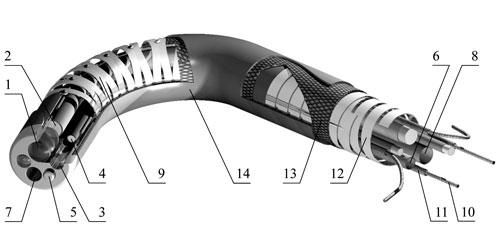
Рис. 4.4. Дистальний кінець гнучкого ендоскопа
В даний час існує безліч варіантів гнучких зчленувань керованої частини ендоскопа, але найбільш поширеною залишається конструкція, представлена на рисунку 4.5 (названа "раковою шийкою").
Кільця спеціальної форми 1 шарнірно сполучені між собою клепками 2 так, що виходить рухлива система, яка має два ступеня вільності, - вигини в двох взаємно перпендикулярних площинах. Керування вигином здійснюється двома парами тросів 3, які пропущені крізь гнучкі металеві оболонки 4, припаяні до останнього кільця 8, а в межах керованої частини - крізь кільця 5, припаяні з внутрішньої сторони до кілець 1. З дистального боку в точках 6 тросів припаяні до кільця 7, до якого кріпиться об'єктив ендоскопа.

Рис. 4.5. Гнучкі зчленування керованої частини ендоскопа типа "ракова шийка"
Недоліком розглянутої конструкції є зниження надійності при експлуатації, оскільки кільця 5, в яких протягнуті керуючі вигином троси 3, надмірно тонкі. Це призводить до того, що керуючі троси, при натягненні і загинанні дистального кінця перегинаються по різко ламаній лінії, що сприяє швидкому перетиранню як самих кілець, так і тросів в процесі експлуатації. Недоліком даної конструкції є і наявність клепок 2, створюючих шарнірне з'єднання ланок, що значно ускладнює саму конструкцію і відповідно ускладнює складання цього механізму при виготовленні.
Для підвищення надійності при експлуатації і спрощення конструкції в роботі [50] запропоновано гнучке зчленування для ендоскопа, представлене на рисунку 4.6.

Рис. 4.6. Гнучкі зчленування керованої частини ендоскопа з щільно навитими пружинами
Конструкція гнучкого зчленування для керованої дистальної частини ендоскопа виконана у вигляді каркаса з кілець 1, сполучених всередині між собою відрізками оболонок тросів 2 і 3, виконаних у вигляді пружин з щільно навитими витками, всередині яких протягнуті керуючі тяга-троси 4, зафіксованих одним кінцем 6 на першому кільці 7. При цьому кільця сполучені між собою в шаховому порядку. Відрізки оболонок тросів одночасно виконують функції направляючих кілець і шарнірних з'єднань зважаючи на свою гнучкість. В цьому випадку відпадає необхідність в клепках, як в попередньому варіанті, досить того, що відрізки легко згинаються, внаслідок чого згинається і вся конструкція гнучкого зчленування. До останнього кільця 8 припаяні чотири боудени 5, крізь яких пропущені троси керування.
Для здобуття вигину керованої частини в одну із сторін за допомогою будь-якого механізму керування (див. п. 4.2.2) здійснюють натягнення одного з тяги-тросів 4 на деяку величину. При цьому групи зовнішніх кілець 1 зближуються один з одним, утворюючи профіль через вигинання відрізань оболонок тросів 2 і 3. Таким чином, маніпулюючи натягненням одного з тросів 4 або комбінуючи натягнення пар тросів, можна добитися вигину керованої частини в будь-яку сторону. Пружинно-кільцева структура конструкції дозволяє всьому механізму після припинення натягнення тросів автоматично повертатися у вихідний (прямий) стан, що зручно при експлуатації.
Ще один з можливих варіантів гнучкого зчленування керованої частини ендоскопа розглянутий в роботі [51] і представлений на рисунку 4.7.

Рис. 4.7. Гнучкі зчленування керованої частини ендоскопа
Конструкція містить основні кільця 1 з сферичною бічною поверхнею, в яких виконані отвори для розміщення тросів 3 керування і гнучких пружних зв'язків 5 і додаткові циліндрові кільця 2, встановлені так, щоб частково перекривати зовнішню поверхню основних кілець. До останнього кільця припаяні боудени 4, крізь яких пропущені троси керування.
Пристрій працює таким чином. За допомогою механізму керування натягують на певну величину один з тросів 3. Оскільки даний трос керування закріплений на першому основному кільці 6, то він кінематично пов'язаний з другим тросом керування, утворюючи так звану керуючу пару. Натягнення троса керування 3 викликає деформацію пружних зв'язків 5, зафіксованих в основних кільцях 1. При цьому додаткові кільця 2 ковзають по сферичній зовнішній поверхні основних кілець, і вся конструкція згинається у напрямі натягнення троса керування. Таким чином, величина вигину гнучкої керованої частини залежить від величини переміщення керуючих тросів 3 і конструктивних особливостей основних 1 і додаткових кілець 2.
Розглянута конструкція не позбавлена таких недоліків як складність конструкції через наявності ланок двох типів, обмежена надійність через використання пружних ланок, наявність залишкового крутного моменту.
Гнучке зчленування керованої частини ендоскопа з підвищеною подовжньою жорсткістю і зниженим залишковим моментом обертання запропоноване в роботі [52] і представлене на рисунку 4.8.
Гнучка керована частина ендоскопа містить кільцеві елементи 1 чашоподібної форми, встановлені з перекриттям зовнішньої поверхні попереднього елементу внутрішньою поверхнею подальшого елементу. На зовнішній поверхні елементів 1 нанесені кільцеві канавки для встановлення основи подальшого елементу. У кільцевому елементі виконано чотири симетричні довгасті отвори, керуючі троси 2 закріплені в кільці 3 на дистальному кінці, пропущені через отвори кільцевих елементів 1 і кільце 5 на іншому кінці трубки. Керуючий трос виконаний у вигляді стрічки жолобоподібної форми і встановлений паралельно повздовжній осі конструкції опуклістю назовні. У кільці 5 закріплені торці обплетень боудена 6. Керуючі троси 2 проходять через ці обплетення до тяги механізму керування.

Рис. 4.8. Гнучкі зчленування керованої частини ендоскопа з кільцевими елементами чашоподібної форми