

|
ПРЕДВАРИТЕЛЬНО |
||
|
Технологическое Управление Подъемной Машиной (WTC)
|
Руководство
|
|
|
|
||
|
Редакция: 1.0 |
Декабрь 2004 |
|
|
|
Общее |
|
|
|
Содержание |
|
|
Winder Technology Controller |
Общее краткое описание |
1 |
|
WTC |
Описание работы |
2 |
|
Технологическое Управление Подъемной Машиной |
Оборудование |
3 |
|
|
Направляющая часть |
4 |
|
|
Контролирующая часть |
5 |
|
|
Программное обеспечение S7 - 400 |
6 |
|
|
Программное обеспечение FM458 |
7 |
|
|
Список параметров FM458 |
8 |
|
|
Экспертный список параметров |
9 |
|
|
Передача данных |
10 |
|
|
Приложение |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мы проверили содержимое брошюры на соответствие описанным аппаратным и программным средствам. Тем не менее, не могут быть исключены отклонения, таким образом мы не гарантируем полного соответствия. Данные, приведенные в данной брошюре, регулярно проверяются. В последующие издания вносятся необходимые исправления. Мы будем благодарны за Ваши рационализаторские предложения. |
Все продукты под названием Siemens являются зарегистрированной торговой маркой |
Содержание
1 Общее краткое описание 5
2 Описание работы 10
3 Аппаратные средства 16
4 Описание направляющей части 51
5 Контролирующая часть 56
6 Программное обеспечение в S7-400 77
7 Программное обеспечение в FM458 78
8 Список параметров для программного обеспечения FM458 101
9 Экспертные параметры 118
10 Передача данных 126
11 Приложение 131
|
УКАЗАНИЕ |
|
-
Общее краткое описание
Рентабельность рудника в большей степени определяется эффективностью шахтной подъемной установки. Помимо эффективности не менее важна безопасность людей при транспортировке по шахтному стволу. Технологическое управление подъемной машиной (WTC) объединяет оба этих важных аспекта в одном продукте. При помощи датчика задающих параметров (FGG) в регуляторе скорости подъема при каждом цикле подъема рассчитывается оптимальная по времени кривая подъема для того, чтобы эффективно эксплуатировать установку благодаря точному дотягиванию до конечной точки. Посредством двуканального исполнения системы автоматизации и многочисленным контролирующим функциям достигается надежная и безопасная эксплуатация шахтной подъёмной установки.
Технологическое управление подъемной машиной поддерживает как фрикционные, так и подъемные машины барабанного типа и позволяет выполнить быстрый монтаж системы автоматизации для одного из типов установок. Монтаж заключается во встраивании стандартных функций для шахтных подъемных установок в аппаратные и программные средства.
Благодаря этим стандартным функциям необходим только “дельта-инжиниринг.“ Как показано на следующем рисунке, у WTC имеется различные интерфейсы аппаратных и программных средств для сопряжения с его окружением. Для коммуникации применяется PROFIBUS DP и промышленная локальная сеть (Ethernet). Через WTC могут быть соединены все изображенные ниже компоненты установки.
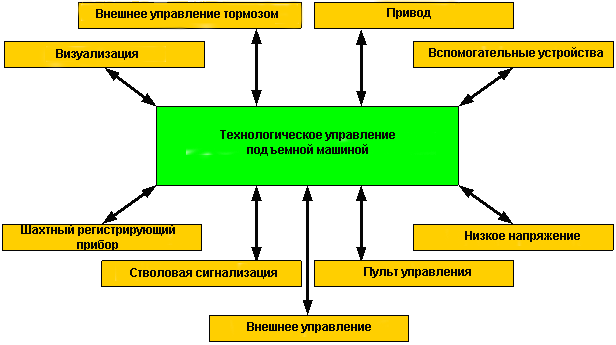
Рисунок 1‑1: Сопряжения WTC
Автоматизация состоит из двухканальной системы автоматизации на основе SIMATIC S7 – серии 400. Система автоматизации устроена двуканально (Канал A / B) для того, чтобы все сигналы, касающиеся безопасности, и контрольные функции могли быть обработаны двукратно. Система автоматизации структурно состоит из двух основных компонентов:
-
регулятор скорости подъема;
-
управление ПМ.
Регулятор скорости подъема берет на себя функцию управления подъемным сосудом в шахтном стволе и его контроль, включая концепцию безопасности автоматизации. Регулятор скорости подъема технологического управления WTC содержится всегда в качестве стандартного пакета программных средств. Управление ПМ выполняет координирование оставшихся компонентов установки, отображенных на рисунке 1-1. Оно состоит из отдельных опциональных пакетов программного обеспечения и должно скомпоновано в зависимости от конкретной установки.
Обмен всеми сигналами, касающимися безопасности, осуществляется двуканально и через клеммы аппаратных средств и через магистрали управления WTC с соответствующими компонентами установки. Сигналы взаимно контролируются через связь между обоими каналами. Также результаты контроля между двумя каналами сравниваются друг с другом. Для распознавания систематической ошибки в системе или неправильной обработки в программных модулях, отвечающих за безопасность, была разработана концепция безопасности. Эта концепция безопасности состоит из проверочных функций, она во время каждого цикла ЦП проверяет в программном обеспечении функции, касающиеся безопасности.
Если сигнал, контрольные функции или концепция безопасности сообщают о неисправности или ошибке, в системе имеются три выключающих цепи:
-
предохранительная цепь;
-
цепь торможения хода;
-
цепь блокировки пуска.
Выключающие цепи имеются в обоих каналах. Эти три цепи действуют по-разному. При срабатывании предохранительной цепи моментально срабатывает предохранительный тормоз установки и останавливается привод. При срабатывании цепи торможения хода подъемные сосуды электрически притормаживаются и во время состояния покоя срабатывает предохранительный тормоз.
При срабатывании цепи блокировки пуска завершается текущий цикл подъема, но повторный пуск не возможен, так как наложен предохранительный тормоз.
Для того чтобы проверить все контрольные и проверочные функции, имеется опциональный диагностический портативный компьютер. При помощи этого портативного компьютера можно проверить все контрольные и проверочные функции.
Управление ПМ содержит пакеты программных средств (как, например, последовательность включения/выключения установки), стволовую сигнализацию, пульт управления, систему визуализации, …
Система визуализации базируется на Protool и работает на стандартном ПК, который соединен с каналом А и B посредством PROFIBUS DP или промышленной локальной сети. Система визуализации содержит стандартизованные изображение, как указатель глубины, система сообщения о неисправностях, протокол подъема, …
Бóльшая часть управления ПМ размещена в канале А. При отказе канала А не предусмотрено, что система В возьмет на себя протекание процесса! У шахтных ПМ эта функция не является необходимой, так как при неисправности установка может быть снова включена в рабочий режим, чтобы, например, вывести людей из шахтного ствола.
Для WTC вид привода не имеет значения. Управление WTC может работать как с приводом постоянного тока, так и с синхронным приводом. От регулятора частоты вращения системы регулирования в регуляторе скорости подъема привод получает заданное значение крутящего момента. Система регулирования частоты вращения получает через инкрементный датчик свои фактические значения, которые уже имеются на стандартных интерфейсах в регуляторе скорости подъема для преобразователей SIMOVERT D, ML2 и DC – Master. Если применяются другие продукты, необходимо привести в соответствие устройства сопряжения.