

2.2.7. Запаздывающее звено
Выходная величина
в запаздывающем звене точно повторяет
входную величину, но с некоторым
запаздыванием на величину
![]() :
:
![]() .
.
Для определения передаточной функции звена найдем изображение выходной величины по Лапласу:
![]() .
.
Введём новую
переменную
![]() ,
тогда запишем:
,
тогда запишем:
![]() .
.
Вынося постоянную
величину
![]() за знак интеграла и учитывая, что
дифференциал
за знак интеграла и учитывая, что
дифференциал
![]() постоянной величины равен нулю, получим:
постоянной величины равен нулю, получим:
![]() .
.
Так как согласно
формуле (2.7)
![]() интеграл в этом выражении является
изображением
интеграл в этом выражении является
изображением
![]() функции
функции
![]() ,
получим:
,
получим:
![]() .
.
Таким образом, запаздывающее звено имеет передаточную функцию
![]() . (2.53)
. (2.53)
Переходный процесс
запаздывающего звена при ступенчатом
изменении входной величины на
![]() представлен на рис. 2.16.
представлен на рис. 2.16.
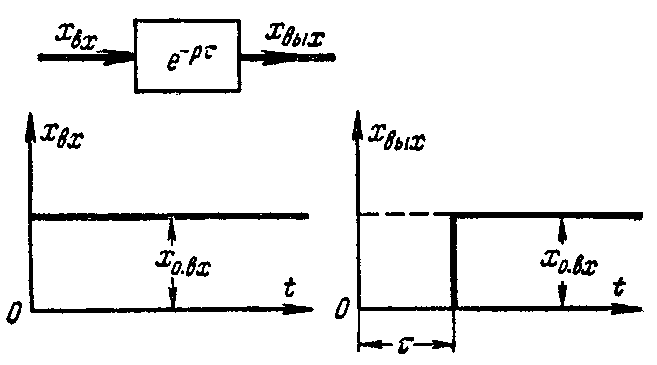
Рис. 2.17. Передаточная функция и переходный процесс запаздывающего звена
2.2.8. Представление реальных аср типовыми звеньями
Представление одних и тех же элементов АСР в конкретных различных случаях не является однозначным. Это представление зависит от того, по какому каналу рассматривается данный элемент, а также от степени инерционности в целом.
Так, электродвигатель при необходимости учета его электромеханической постоянной по каналу: подводимое к двигателю напряжение – угол поворота его якоря (ротора), является в динамическом отношении реальным интегрирующим звеном, определяемым дифференциальным уравнением
![]()
Если же система,
в которой работает электродвигатель,
является инерционной и по сравнению с
длительностью переходных процессов в
ней время разгона электродвигателя
мало, то инерцией электродвигателя
можно пренебречь, т.е. полагать в
выражении
![]() .
В этом случае электродвигатель можно
считать идеальным интегрирующим звеном.
.
В этом случае электродвигатель можно
считать идеальным интегрирующим звеном.
При применении
электродвигателя в какой-либо системе
по каналу подводимое
напряжение – угловая скорость
![]() его вращения, если подставить в выражение
(2.51)
его вращения, если подставить в выражение
(2.51)
![]() ,
можно найти, что в этом случае двигатель
является апериодическим звеном.
,
можно найти, что в этом случае двигатель
является апериодическим звеном.
Если при этом представляется возможным пренебречь электромеханической постоянной, то двигатель в динамическом отношении будет представлен усилительным звеном.
Один и тот же
элемент системы можно представить, в
зависимости от его сложности, одним
или несколькими типовыми звеньями, тем
или иным образом соединенными между
собой. В то же время несколько простых
(например, усилительных) звеньев можно
представить в структурной схеме одним
звеном. При этом на структурной схеме
звено не обязательно должно отражать
какой-либо физический элемент системы.
Оно может соответствовать какой-либо
математической зависимости, например
связи между угловой скоростью и углом
поворота
![]() .
.
Таким образом, прежде чем приступить к составлению уравнений звеньев системы регулирования, необходимо всесторонне изучить реальные условия их работы в данной системе. При этом, если с достаточной для конкретного случая точностью можно понизить порядок уравнения того или иного системы, это необходимо делать, т.к. в этом случае понижается порядок уравнения процесса регулирования системы в целом и упрощается ее расчет и исследование. При этом следует учитывать, что постоянные времени отдельных звеньев можно считать равными нулю в тех случаях, когда они в несколько десятков раз меньше постоянных времени остальных звеньев АСР.