

4. Импульсные системы
4.1. Математическое описание дискретных объектов управления в электромеханических системах
В современных электромеханических системах для придания им заданных динамических свойств широко используются цифровые регуляторы, выполненные на микропроцессорах. При описании цифровых систем используются разностные уравнения.
Разность первого порядка определяется по выражению
![]()
![]()
и переходит в
производную при
![]() ,
,
![]()
Величина
![]() является значением, которое вычислено
микропроцессором на предшествующем
дискретном шаге и сохранено (задержано)
в памяти.
является значением, которое вычислено
микропроцессором на предшествующем
дискретном шаге и сохранено (задержано)
в памяти.
Разность второго порядка определяется по выражению

и переходит во
вторую производную при
![]() ,
,
![]()
Разность третьего порядка
![]()
При этом
дифференциальное уравнение
![]() -го
порядка, описывающее линейную динамическую
непрерывную систему
-го
порядка, описывающее линейную динамическую
непрерывную систему
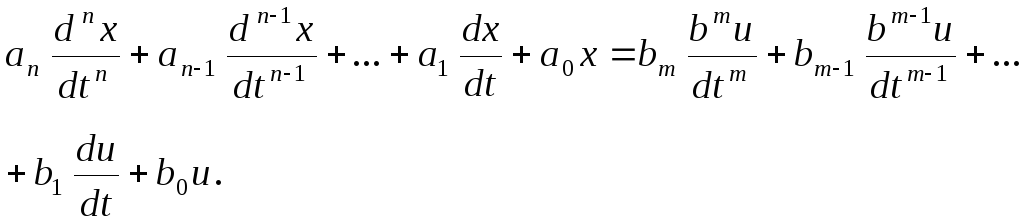
преобразуется в
разностное уравнение
![]() -го
порядка.
-го
порядка.
![]() (4.1)
(4.1)
Значение
аппроксимирующей функции
![]() задержано во времени относительно
значения
задержано во времени относительно
значения
![]() на период дискретизации
на период дискретизации
![]() .
Аналогично значение
.
Аналогично значение
![]() задержано относительно
задержано относительно
![]() на
на
![]() периодов дискретизации.
периодов дискретизации.
Обозначив оператор
задержки на период дискретизации через
![]() ,
а на
,
а на
![]() периодах – через
периодах – через
![]() ,
выразим через оператор
,
выразим через оператор
![]() разности из уравнения (4.1)
разности из уравнения (4.1)
![]() (4.2)
(4.2)
Из уравнения (4.2), аналогично тому, как это делалось для непрерывных систем, найдем операторную передаточную функцию дискретной системы.
 (4.3)
(4.3)
4.2. Общие сведения об импульсных системах
Линейной импульсной системой называется такая система автоматического управления, которая кроме звеньев, описываемых линейными дифференциальными уравнениями, содержит импульсный элемент, преобразующий непрерывное входное воздействие в последовательность импульсов (рис. 4.1, а).
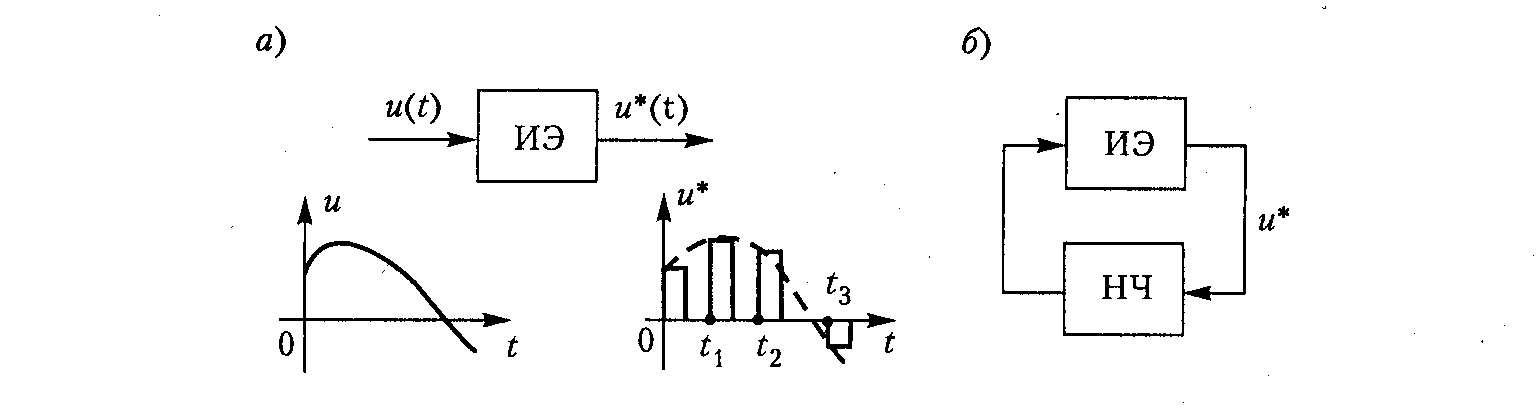
Рис. 4.1. Представление импульсных систем
В общем случае можно изобразить обобщенную структурную схему импульсной системы так, как показано на рисунке (4.1, б), где все непрерывные звенья сведены в один блок – непрерывную часть системы НЧ, которая может иметь какую угодно структуру (любой сложности, с обратными связями и т.п.).
Импульсный элемент может представлять собой самостоятельное функциональное устройство или являться составной частью цифро-аналоговых преобразователей, входящих в систему управления с цифровыми управляющими машинами (ЦВМ).
В процессе
преобразования непрерывного сигнала
в дискретный (импульсный) элемент (рис.
4.1, а)
выполняет две операции: квантование
по времени и импульсную модуляцию.
Первая из них состоит в том, что сигнал
![]() появляется в дискретные моменты времени
появляется в дискретные моменты времени
![]() .
Чаще всего эти моменты времени
равноотстоящие, т.е.
.
Чаще всего эти моменты времени
равноотстоящие, т.е.
![]() ,
где Т – период дискретности. В результате
импульсной модуляции изменяется
какой-либо параметр импульса (амплитуда,
ширина). Форма импульсов может быть
любой (прямоугольной, трапецеидальной
и т.п.), но обычно используются импульсы
прямоугольной формы.
,
где Т – период дискретности. В результате
импульсной модуляции изменяется
какой-либо параметр импульса (амплитуда,
ширина). Форма импульсов может быть
любой (прямоугольной, трапецеидальной
и т.п.), но обычно используются импульсы
прямоугольной формы.
Наиболее распространенными видами импульсной модуляции являются амплитудно-импульсная (АИМ) и широтно-импульсная (ШИМ).
При амплитудно-импульсной
модуляции модулируемым параметром
служит амплитуда (высота) импульсов.
Обычно она пропорциональна значениям
непрерывного сигнала
![]() в дискретные моменты времени
в дискретные моменты времени
![]() ,
т.е. значениям
,
т.е. значениям
![]() (4.4)
(4.4)
Сигнал
![]() на выходе импульсного элемента
формируется в виде (рис. 4.2).
на выходе импульсного элемента
формируется в виде (рис. 4.2).
 (4.5)
(4.5)
где k
– коэффициент пропорциональности;
![]() – скважность импульсов, которая остается
постоянной
– скважность импульсов, которая остается
постоянной
![]() .
.
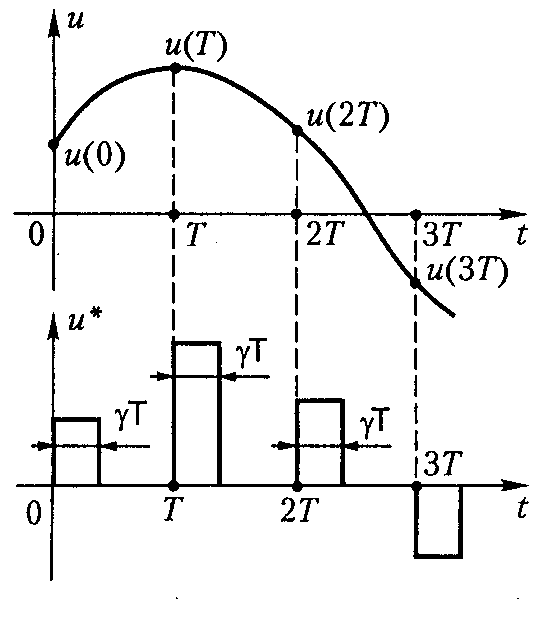
Рис. 4.2. Амплитудно-импульсная модуляция
При широтно-импульсной
модуляции модулируемым параметром
является ширина (длительность) импульсов
![]() ,
где
,
где
![]() – скважность i-го
импульса. Амплитуда импульсов при этом
остается постоянной. Сигнал на выходе
импульсного элемента (широтно-импульсного
модулятора) формируется в виде (рис.
4.3).
– скважность i-го
импульса. Амплитуда импульсов при этом
остается постоянной. Сигнал на выходе
импульсного элемента (широтно-импульсного
модулятора) формируется в виде (рис.
4.3).
 (4.6)
(4.6)
где h – амплитуда импульсов, а sign u(iT) означает знак величины u(iT).
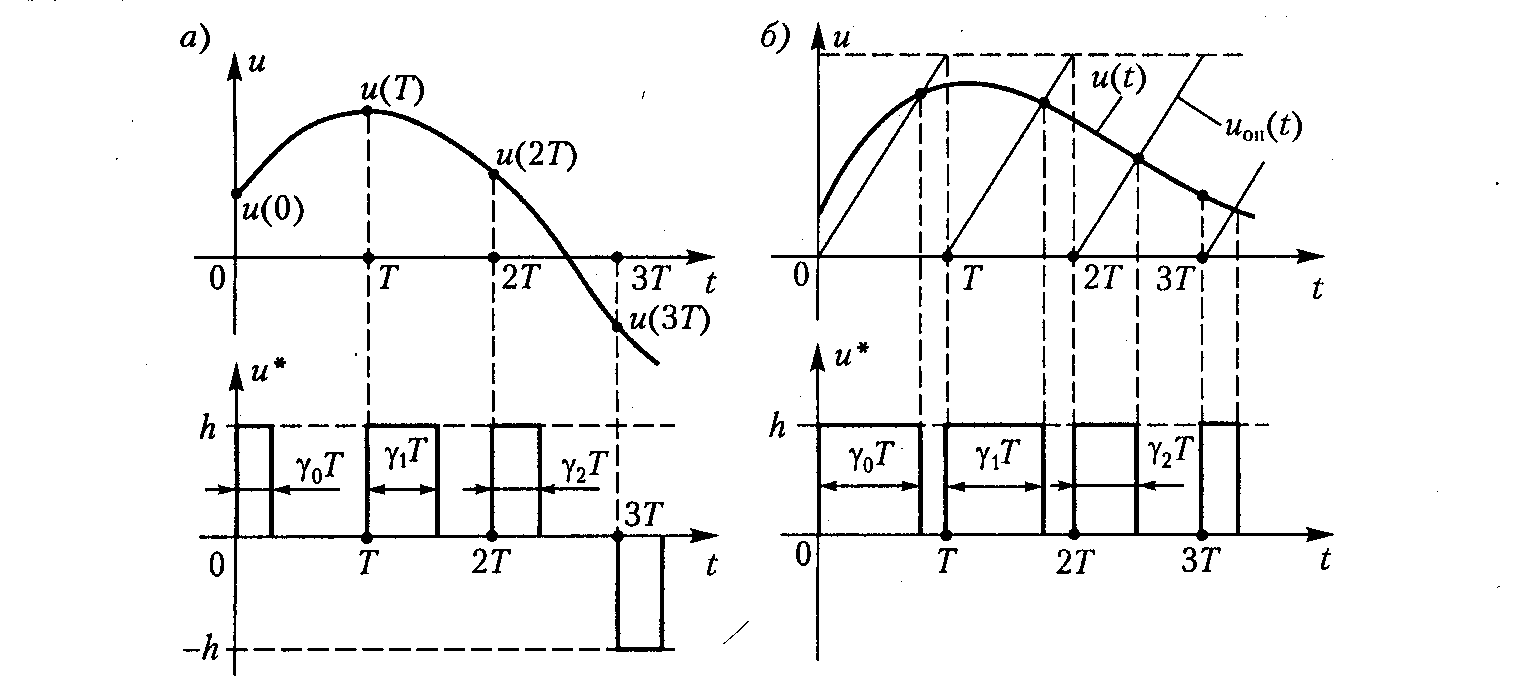
Рис. 4.3. Широтно-импульсный модулятор
В зависимости от
способа определения текущего значения
скважности
![]() различают широтно-импульсную модуляцию
1-го рода (ШИМ-1) и 2-го рода (ШИМ-2).
различают широтно-импульсную модуляцию
1-го рода (ШИМ-1) и 2-го рода (ШИМ-2).
При ШИМ-1 (рис. 1.3, а) скважность i-го импульса
 (4.7)
(4.7)
где
![]() – коэффициент пропорциональности
(крутизна характеристики широтно-импульсного
модулятора).
– коэффициент пропорциональности
(крутизна характеристики широтно-импульсного
модулятора).
Так как длительность
импульса
![]() не может быть больше периода дискретности
Т, то при
не может быть больше периода дискретности
Т, то при
![]() скважность
скважность
![]() ,
т.е. происходит насыщение модулятора.
,
т.е. происходит насыщение модулятора.
При ШИМ-2 (рис. 4.3,
б)
длительность импульсов определяется
в результате сравнения непрерывного
входного сигнала u(t)
с некоторым периодическим опорным
сигналом
![]() ,
в качестве которого обычно используется
пилообразный сигнал, формируемый
специальным генератором. Импульсы
запускаются в моменты времени t
= iT
и существуют до момента совпадения
сигналов u(t)
и
,
в качестве которого обычно используется
пилообразный сигнал, формируемый
специальным генератором. Импульсы
запускаются в моменты времени t
= iT
и существуют до момента совпадения
сигналов u(t)
и
![]() .
Как правило, ШИМ-2 используется в
системах, в которых сигнал u(t)
не меняет свой знак.
.
Как правило, ШИМ-2 используется в
системах, в которых сигнал u(t)
не меняет свой знак.
Широтно-импульсный модулятор даже, если он в процессе работы системы управления не насыщается, является нелинейным элементом. В этом можно убедиться, воспользовавшись принципом суперпозиции, согласно которому реакция линейного звена на сумму входных воздействий должна быть равна сумме реакций.
На рис. 4.4, а в качестве примера изображена схема импульсного стабилизатора напряжения.
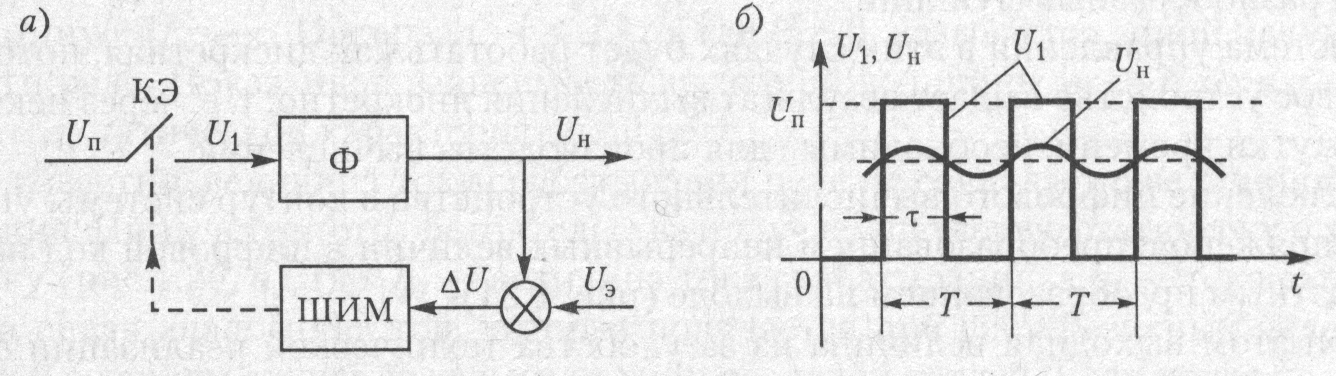
Рис. 4.4. Схема импульсного стабилизатора напряжения
Напряжение
первичного источника энергии
![]() преобразуется ключевым элементом КЭ
в последовательность модулированных
по ширине импульсов
преобразуется ключевым элементом КЭ
в последовательность модулированных
по ширине импульсов
![]() (рис. 4.4, б).
Изменение времени замкнутого состояния
ключевого элемента и тем самым ширины
импульсов
(рис. 4.4, б).
Изменение времени замкнутого состояния
ключевого элемента и тем самым ширины
импульсов
![]() осуществляется схемой управления,
состоящей из широтно-импульсного
модулятора (ШИМ) и сравнивающего
устройства. Последнее сравнивает
фактическое значение сглаженного
фильтром Ф напряжения на нагрузке
осуществляется схемой управления,
состоящей из широтно-импульсного
модулятора (ШИМ) и сравнивающего
устройства. Последнее сравнивает
фактическое значение сглаженного
фильтром Ф напряжения на нагрузке
![]() (управляемая величина) с эталонным
значением
(управляемая величина) с эталонным
значением
![]() (задающее воздействие) и определяет
ошибку
(задающее воздействие) и определяет
ошибку
![]() .
Если
.
Если
![]() ,
то ширина импульсов на выходе ШИМ
увеличивается, в результате чего
увеличивается время замкнутого состояния
ключевого элемента и тем самым
длительности импульсов
,
то ширина импульсов на выходе ШИМ
увеличивается, в результате чего
увеличивается время замкнутого состояния
ключевого элемента и тем самым
длительности импульсов
![]() .
При
.
При
![]() длительность импульсов
длительность импульсов
![]() ,
наоборот, уменьшается. В качестве
ключевого элемента может быть использован,
например, силовой транзистор.
,
наоборот, уменьшается. В качестве
ключевого элемента может быть использован,
например, силовой транзистор.
В отличие от стабилизаторов напряжения непрерывного действия, в которых весь избыток энергии превращается в тепло, здесь от первичного источника отбирается столько энергии, сколько необходимо потребителю. Поэтому и коэффициент полезного действия импульсных стабилизаторов значительно выше.
При широтно-импульсном
управлении скоростью вращения
электрического двигателя не только
экономится энергия, но и обеспечивается
плавность хода на малых (так называемых
«ползучих») скоростях. Это объясняется
следующим. При непрерывном управлении
для обеспечения малой скорости на
двигатель необходимо подавать небольшое
напряжение, сопоставимое с напряжением
«трогания» двигателя. Поэтому вращение
происходит рывками. При широтно-импульсном
управлении на двигатель подается
максимальное напряжение, но в течение
небольшого промежутка
![]() .
.