

3.8. Последовательные и параллельные корректирующие устройства
В связи с тем, что регулирование, пропорциональное отклонению регулируемой величины от заданного значения и регулирование, пропорциональное интегралу от отклонения, имеют свои достоинства и недостатки является целесообразным создание комбинированных систем. В этих системах регулирование осуществляется и по отклонению и по интегралу от отклонения, в результате чего представляется возможным сочетать достаточное быстродействие в начальный момент процесса регулирования и повышенную устойчивость, свойственные статическим системам с отсутствием статической ошибки, характерным для астатических систем.

Рис. 3.37. Характеристика статического регулирования
На рис. 3.37
представлена зависимость установившегося
значения регулируемой величины Q
(температуры) от постоянного возмущающего
воздействия
![]() для статической системы автоматического
регулирования. Она настраивается, чтобы
при наиболее вероятном (расчетном)
постоянном возмущающем воздействии
для статической системы автоматического
регулирования. Она настраивается, чтобы
при наиболее вероятном (расчетном)
постоянном возмущающем воздействии
![]() величина регулируемого параметра была
равна заданному значению.
величина регулируемого параметра была
равна заданному значению.
Если при работе системы величина возмущающего воздействия будет изменяться, то заданное значение будет поддерживаться с некоторой статической ошибкой, величина которой определяется из выражения для установившейся ошибки регулирования по каналу возмущающего воздействия для статических объекта и регулятора.
![]() .
.
где
![]() – постоянное возмущающее воздействие.
– постоянное возмущающее воздействие.
При астатическом объекте и статическом регуляторе
![]() .
.
Из этих выражений следует, что в данном случае величина установившейся ошибки прямо пропорциональна величине возмущающего воздействия и коэффициенту передачи объекта. Для уменьшения ее следует увеличивать коэффициент передачи регулятора.
В соответствии с выше приведенной формулой тангенс угла наклона статической характеристики системы к оси абсцисс равен
![]() при статическом
объекте
при статическом
объекте
или
![]() при астатическом объекте
при астатическом объекте
При статическом
объекте и астатическом регуляторе, а
также при астатическом объекте и
астатическом регуляторе в замкнутой
системе регулирования
![]()
Передаточная
функция
![]() регулятора, изображенного на рис. 3.38,
имеет вид:
регулятора, изображенного на рис. 3.38,
имеет вид:
![]() ,
,
или
![]() .
.
Вынеся за скобки
![]() и обозначив
и обозначив
![]() и
и
![]() ,
получим:
,
получим:
![]() .
.
Полученное соотношение есть формула ПИ-регулятора, структурная схема которого приведена на рис. 3.38.
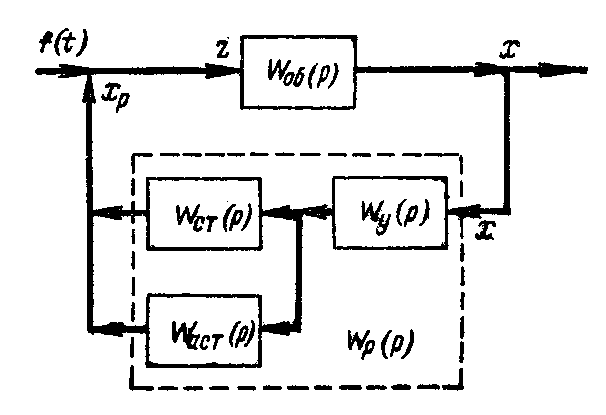
Рис. 3.38. Структурная схема системы с ПИ-регулятором
Чтобы предупредить
возникновение ожидаемых больших
отклонений регулируемой величины,
целесообразно ввести в закон регулирования
дополнительное регулирующее воздействие
на объект, зависящее от скорости
нарастания отклонения регулируемой
величины от заданной нормы. Обычно это
добавочное регулирующее воздействие
![]() пропорционально скорости изменения
регулируемой величины х, т.е.
пропорционально производной отклонения
пропорционально скорости изменения
регулируемой величины х, т.е.
пропорционально производной отклонения
![]() по времени:
по времени:
![]() ,
,
или
![]() .
.
Таким образом, передаточная функция этого дополнительного корректирующего звена регулятора теоретически должна иметь вид:
![]() ,
,
т.е. корректирующее звено должно быть идеальным корректирующим звеном.
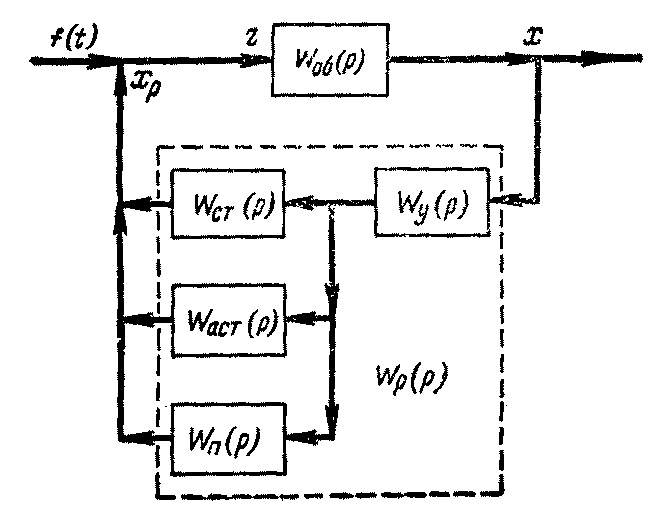
Рис. 3.39. Структурная схема с ПИД-регулятором
На рис. 3.39
представлена структурная схема САР,
включающая корректирующее дифференцирующее
звено с передаточной функцией
![]() .
.
Передаточная функция регулятора
![]() .
.
Подставив значения передаточных функций отдельных звеньев, получим:
![]() .
.
Вынеся за скобки
![]() и обозначив
и обозначив
![]() ;
;
![]() ;
;
![]() ,
получим:
,
получим:
![]() .
.
Рассматриваемый регулятор относится к классу ПИД-регуляторов. Система с ПИД-регулятором является астатической. Соответствующими настройками ПИД-регулятора можно в качестве частных случаев получить П- и ПИ-законы регулирования.
Причины улучшения динамических свойств системы при введении в закон регулирования составляющей, пропорциональной производной от отклонения регулируемой величины, можно наглядно объяснить в помощью рис. 3.40.
Допустим, суммарный
закон регулирования составляется из
трех регулирующих воздействий:
статического
![]() ,
пропорционального отклонению
,
пропорционального отклонению
![]() регулируемой величины от заданного
значения; астатического
регулируемой величины от заданного
значения; астатического
![]() ,
пропорционального интегралу
,
пропорционального интегралу
![]() ,
и корректирующего
,
и корректирующего
![]() ,
пропорционального
,
пропорционального
![]() .
.
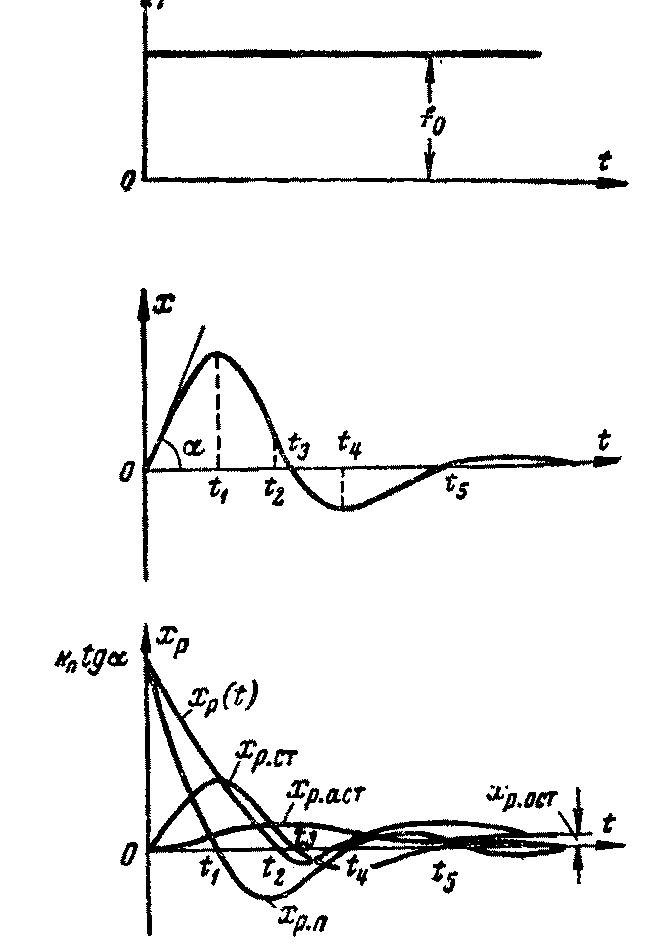
Рис. 3.40. Переходные процессы и их составляющие
в системе с ПИД-регулятором
Предположим, что
в результате появления в системе
значительного постоянного возмущающего
воздействия
![]() начинается увеличиваться отклонение
начинается увеличиваться отклонение
![]() .
В начальный момент времени две из трех
составляющих из закона регулирования
.
В начальный момент времени две из трех
составляющих из закона регулирования
![]() и
и
![]() равны нулю, так как отклонение еще
только начинает появляться и его
значение пока мало отличается от нуля.
равны нулю, так как отклонение еще
только начинает появляться и его
значение пока мало отличается от нуля.
Но так как скорость
нарастания отклонения в начальный
момент времени, наоборот, максимальна
и равна
![]() ,
то третья составляющая закона
регулирования
,
то третья составляющая закона
регулирования
![]() будет иметь максимальное значение,
равное
будет иметь максимальное значение,
равное
![]() .
.
Благодаря этому
регулятор при фактически еще отсутствующем
отклонении начинает воздействовать
на объект в сторону ликвидации
формирующегося отклонения регулируемой
величины. Иными словами, регулирующее
воздействие
![]() создается регулятором с опережением,
т.е. предваряет воздействие. Только
после появления достаточно большого
отклонения в законе регулирования
появляются ощутимые составляющие
регулирующего воздействия, сформированные
статической и астатической частями
регулятора.
создается регулятором с опережением,
т.е. предваряет воздействие. Только
после появления достаточно большого
отклонения в законе регулирования
появляются ощутимые составляющие
регулирующего воздействия, сформированные
статической и астатической частями
регулятора.
По
мере нарастания этих составляющих,
пропорциональная производной от
отклонения, будет резко уменьшаться,
поскольку суммарное регулирующее
воздействие будет замедлять нарастание
отклонения
![]() .
По истечении времени
.
По истечении времени
![]() ,
когда отклонение регулируемой величины
достигнет максимального значения,
наибольшую величину будет иметь
составляющая
,
когда отклонение регулируемой величины
достигнет максимального значения,
наибольшую величину будет иметь
составляющая
![]() ,
составляющая
,
составляющая
![]() будет так же существенной, а составляющая
будет так же существенной, а составляющая
![]() уменьшится до нуля.
уменьшится до нуля.