

3. Пропорцилнально-интегральные регуляторы
ПИ-регуляторы оказывают воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины:
![]() .
.
Постоянная времени
![]() называется временем изодрома. Она
определяет величину составляющей
регулирующего воздействия, пропорциональной
интегралу от отклонения регулируемой
величины Х и численно равна «времени
удвоения» регулятора, т.е. времени, в
течение которого первоначальное
значение выходной величины регулятора,
равное
называется временем изодрома. Она
определяет величину составляющей
регулирующего воздействия, пропорциональной
интегралу от отклонения регулируемой
величины Х и численно равна «времени
удвоения» регулятора, т.е. времени, в
течение которого первоначальное
значение выходной величины регулятора,
равное
![]() удваивается вследствие действия одной
только его интегральной части.
удваивается вследствие действия одной
только его интегральной части.
Иначе
![]() .
.
Откуда следует, что скорость перемещения исполнительного механизма в ПИ-регуляторе пропорциональна как скорости изменения регулируемой величины, так и самому изменению регулируемой величины.
Передаточная функция ПИ-регулятора
![]() .
.
В динамическом
отношении ПИ-регулятор эквивалентен
П-регулятору с коэффициентом передачи
![]() и И-регулятору с коэффициентом передачи
и И-регулятору с коэффициентом передачи
![]() ,
соединенным параллельно.
,
соединенным параллельно.
Если при настройке
ПИ-регулятора установить очень большую
величину времени изодрома
![]() ,
то он превратится в П-регулятор.
,
то он превратится в П-регулятор.
Если при настройке
регулятора установить очень малые
значения
![]() и
и
![]() ,
но при этом так, чтобы их отношение
,
но при этом так, чтобы их отношение
![]() имело существенную величину, получим
И-регулятор с коэффициентом передачи
имело существенную величину, получим
И-регулятор с коэффициентом передачи
![]() .
.
Закон регулирования ПИ-регулятора представлен на рисунке ниже.
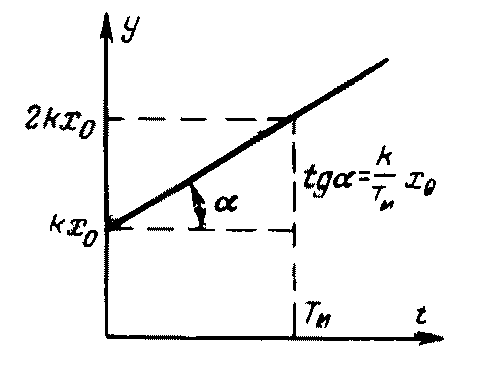
Рис. 3.36 Закон регулирования ПИ-регулятора
При скачкообразном
изменении регулируемой величены на
величину
![]() идеальный ПИ-регулятор вначале мгновенно
перемещает исполнительный механизм
на величину
идеальный ПИ-регулятор вначале мгновенно
перемещает исполнительный механизм
на величину
![]() ,
пропорциональную отклонению
,
пропорциональную отклонению
![]() регулируемой величины, после чего
исполнительный механизм регулятора
дополнительно перемещается в ту же
сторону со скоростью
регулируемой величины, после чего
исполнительный механизм регулятора
дополнительно перемещается в ту же
сторону со скоростью
![]() ,
пропорциональной отклонению регулируемой
величины. Следовательно в ПИ-регуляторе
при отклонении регулируемой величины
от заданного значения мгновенно
срабатывает пропорциональная
(статическая) часть регулятора, а затем
воздействие на объект постепенно
увеличивается под действием интегральной
части регулятора, называемой астатической.
,
пропорциональной отклонению регулируемой
величины. Следовательно в ПИ-регуляторе
при отклонении регулируемой величины
от заданного значения мгновенно
срабатывает пропорциональная
(статическая) часть регулятора, а затем
воздействие на объект постепенно
увеличивается под действием интегральной
части регулятора, называемой астатической.
Параметрами
настройки регулятора являются коэффициент
передачи
![]() и время изодрома
и время изодрома
![]() .
При изменении регулируемой величины
скорость воздействия на объект
астатической части регулятора
определяется величиной отношения
.
При изменении регулируемой величины
скорость воздействия на объект
астатической части регулятора
определяется величиной отношения
![]() .
.
4. Пропорционально-интегрально-дифференциольные регуляторы
ПИД-регуляторы воздействуют на регулирующий орган пропорционально отклонению Х регулируемой величины, интегралу этого отклонения и скорости изменения регулируемой величины:
![]() .
.
Постоянная времени
![]() определяет степень влияния производной
определяет степень влияния производной
![]() (скорости изменения регулируемой
величины) на закон регулирования и
называется временем предварения.
(скорости изменения регулируемой
величины) на закон регулирования и
называется временем предварения.
Передаточная функция регулятора.
![]() .
.
При скачкообразном изменении регулируемой величины идеальный ПИД-регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на регулирующий орган; затем величина воздействия мгновенно падает до значения, определяемого пропорциональной частью регулятора, после чего, как и в ПИ-регуляторе, постепенно начинает оказывать свое влияние астатическая часть регулятора.
Параметрами
настройки регулятора являются коэффициент
передачи регулятора
![]() ,
время изодрома
,
время изодрома
![]() и время предварения
и время предварения
![]() .
.
ПИД-регулятор по возможностям настройки является более универсальным по сравнению с другими регуляторами. С его помощью можно осуществлять различные законы регулирования.
Так, при
![]() и бесконечно большой величине
и бесконечно большой величине
![]() получаем П-регулятор. При
получаем П-регулятор. При
![]() ,
устанавливая достаточно малые значения
,
устанавливая достаточно малые значения
![]() и
и
![]() ,
получает И-регулятор. При
,
получает И-регулятор. При
![]() и конечных значениях
и конечных значениях
![]() и
и
![]() имеем ПИ-регулятор.
имеем ПИ-регулятор.