

1.2. Общая классификация систем автоматического управления
-
По принципу регулирования:
-
разомкнутые системы с программным управлением (рис.1.1, а);
-
разомкнутые системы с управлением по возмущению (рис.1.1, б);
-
замкнутые системы (рис.1.1, в);
-
комбинированные системы (рис.1.1, г).
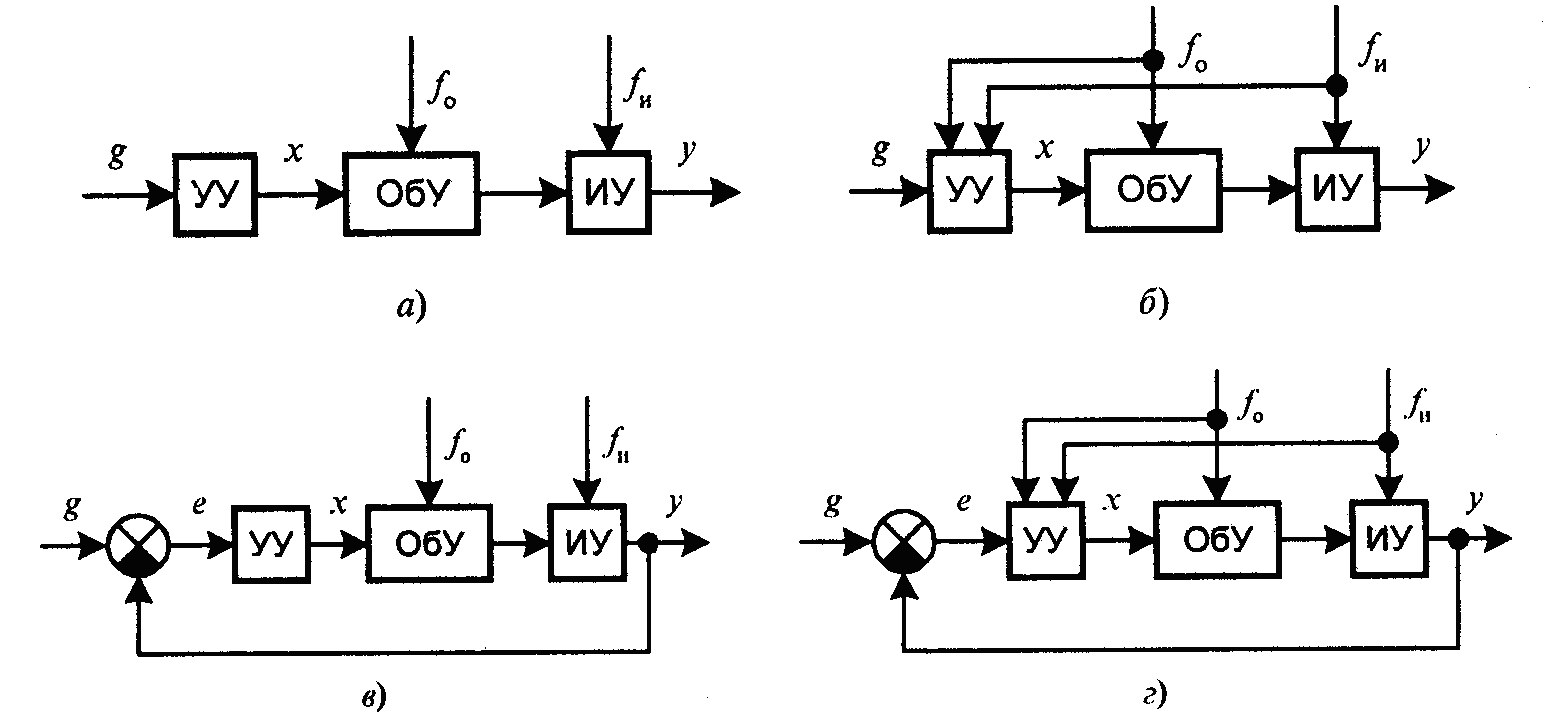
Рис. 1.1. Классификация САУ по принципу регулирования
На рис. 1.1 обозначено:
![]() – регулирующее
воздействие;
– регулирующее
воздействие;
![]() – ошибка
регулирования (невязка);
– ошибка
регулирования (невязка);
![]() – управляющее
воздействие или выходной сигнал
регулятора;
– управляющее
воздействие или выходной сигнал
регулятора;
![]() – измерение или
выходной сигнал измерительного
устройства (ИУ);
– измерение или
выходной сигнал измерительного
устройства (ИУ);
![]() и
и
![]() – возмущение объекта и измерительного
устройства.
– возмущение объекта и измерительного
устройства.
В разомкнутой системе управления информация о текущем состоянии объекта отсутствует либо не используется, управляющее воздействие вырабатывается по заранее составленной программе, а выходной сигнал образуется как непосредственная реакция на это воздействие. Возможность измерения возмущений, нарушающих желаемый ход процесса, повышает эффективность разомкнутого управления благодаря заложенной в регулятор программе компенсации возмущений.
Обратная связь –
важнейшее понятие кибернетики и основной
принцип функционирования сложных
систем, позволяющий в реальном времени
в ходе процесса управления уменьшать
абсолютное значение ошибки регулирования
![]() (рис. 1.1) на основе измерения текущего
состояния объекта
(рис. 1.1) на основе измерения текущего
состояния объекта
![]() и сравнения его с регулирующим
воздействием
и сравнения его с регулирующим
воздействием
![]() .
.
В системах с обратной связью в отличие от разомкнутых систем, становится возможной компенсация неизмеряемых возмущений благодаря их раннему или позднему влиянию на работу системы в виде увеличения ошибки регулирования (рис. 1.1, в).
Если измерение возмущения является возможным, то введение в систему автоматического управления дополнительного контура управления по возмущению позволяет оперативно противодействовать его вредному влиянию, не дожидаясь, пока это влияние заметно проявится в выходном сигнале системы (рис. 1.1, г).
Более подробно явление обратной связи рассмотрел Норберт Винер, сделав теорию управления с обратной связью, можно сказать, краеугольным камнем целой философской системы – «кибернетики», охватывающей всевозможные аспекты от автоматики до физиологии, психологии, экономики, политики и даже этики.
Время и развитие альтернативных воззрений несколько уменьшили великолепие этой картины, однако управление с обратной связью остается в основе, как важнейших идей, так и полезных технических приложений.
-
По цели регулирования
-
системы программного управления (цель:
 ,
т.е.
,
т.е.
 без использования обратной связи);
без использования обратной связи); -
следящие системы: (цель:
 с помощью обратной связи);
с помощью обратной связи); -
системы стабилизации (цель:
 с использованием обратной связи);
с использованием обратной связи); -
экстремальные системы (цель: экстремум некоторого показателя качества управления).
-
По способу формирования сигнала управления регулятором:
-
непрерывные, аналоговые системы (рис. 1.2, а);
-
дискретные системы, использующие квантование времени
 и/или уровня сигнала
и/или уровня сигнала
 :
: -
импульсные системы с квантованием времени, в которых информация об уровне сигнала кодируется с помощью амплитудной (рис 1.2, б), широтной (рис. 1.2, в) или фазовой (рис. 1.2, г) модуляции;
-
релейные системы с квантованием уровня сигнала (рис. 1.2, д);
-
цифровые системы с квантованием по времени и по уровню (рис. 1.2, е);
-
системы с гармонической модуляцией.
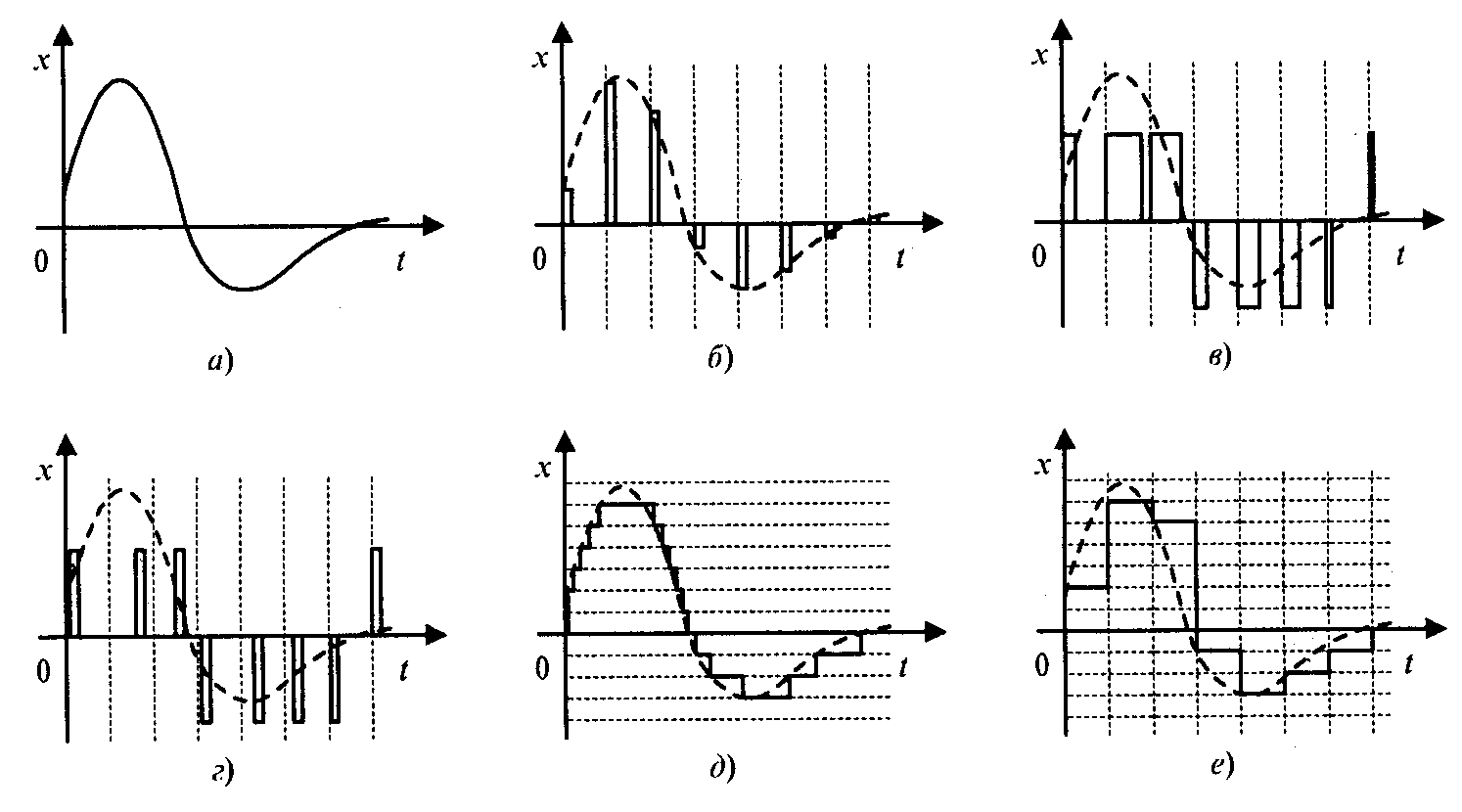
Рис. 1.2 Классификация систем управления
по способу формирования сигнала управления регулятором
В непрерывных системах управление вырабатывается аналоговыми устройствами автоматики, например, схемами на операционных усилителях. В дискретных системах квантование времени выполняется синхронизирующими устройствами – таймерами, а квантование уровня – аналого-цифровыми преобразователями (АЦП). В системах, работающих на переменном токе, высокочастотные колебания несущей частоты модулируются в соответствии с величиной и знаком управляющего сигнала низкой частоты.
-
По количеству регулируемых координат:
-
одномерные системы с одним входом и одним выходом;
-
многомерные системы, которые в зависимости от влияния координат делятся на несвязные и многосвязные.
-
По характеру изменения параметров во времени:
-
стационарные системы, описываемые уравнениями с параметрами, не зависящими от времени;
-
нестационарные системы, параметры моделей которых изменяются во времени.
-
По распределению параметров в пространстве:
-
системы с сосредоточенными параметрами, описываемые обыкновенными дифференциальными уравнениями (ode);
-
системы с распределенными параметрами, описываемые дифференциальными уравнениями в частных производных.
-
По степени идеализации математического описания:
-
линейные системы, описываемые линейными алгебраическими и дифференциальными уравнениями;
-
нелинейные системы, описываемые нелинейными уравнениями.
-
По соотношению сигнал/шум в передаваемой информации:
-
детерминированные системы, в которых отсутствует или не учитывается влияние шума в параметрах и передаваемых сигналах;
-
стохастические системы, работающие при высоких уровнях шумов, статические характеристики которых используются в моделях зашумленных элементов.
-
По характеру переходных процессов:
-
устойчивые системы;
-
неустойчивые системы;
-
нейтральные системы.
Устойчивость движения объекта как свойство объекта или системы самостоятельно возвращаться в состояние равновесия после прекращения воздействия отклоняющих сил – вовсе не врожденное свойство всех объектов. Простейшая иллюстрация этого факта это движение шарика с трением по различным поверхностям (горизонтальной, сферической выпуклой и сферической вогнутой).

Рис. 1.3 Иллюстрация понятия устойчивости движения объекта
В качестве примера условной устойчивости можно рассмотреть акустическую систему, состоящую из микрофона, усилителя и динамика (рис. 1.4).
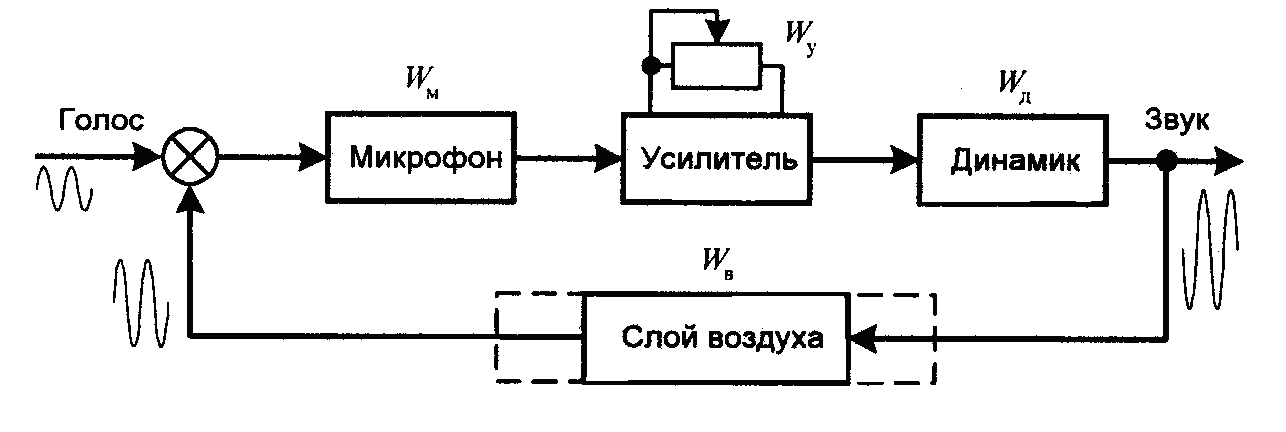
Рис. 1.4. Устойчивость звукоусилительной системы
При слишком близком расположении микрофона от динамических колонок даже в отсутствии голоса возникает процесс самовозбуждения системы вследствие акустической завязки, воспринимаемой на слух как громкий свист на некоторой звуковой частоте.
Причину неустойчивости
упрощенно объясняется с помощью
коэффициентов усиления устройств
![]() и воздушного слоя
и воздушного слоя
![]() ,
имеющих, во-первых, комплексный, а
во-вторых, частотно-зависисимый характер.
Если на некоторой частоте последовательное
соединение блоков в контуре обратной
связи имеет коэффициент усиления
амплитуды колебаний
,
имеющих, во-первых, комплексный, а
во-вторых, частотно-зависисимый характер.
Если на некоторой частоте последовательное
соединение блоков в контуре обратной
связи имеет коэффициент усиления
амплитуды колебаний
![]()
и фазовый сдвиг
![]() ,
,
т.е. выполняется условие самовозбуждения (баланс амплитуд и баланс фаз), то малейший сигнал этой частоты, попав в микрофон из внешней среды, лавинообразно усиливается в контуре обратной связи до достижения максимальной конструктивной мощности усилителя.
Устранить неустойчивость можно следующими способами:
-
уменьшить
 ,
т.е. убавить громкость звука регулятором
усилителя;
,
т.е. убавить громкость звука регулятором
усилителя; -
уменьшить
 ,
т.е. отодвинуть микрофон подальше от
динамика.
,
т.е. отодвинуть микрофон подальше от
динамика.
Таким образом, на
плоскости параметров
![]() и
и
![]() существуют области устойчивости и
неустойчивости системы, разделенные
границей устойчивости (рис. 1.5).
существуют области устойчивости и
неустойчивости системы, разделенные
границей устойчивости (рис. 1.5).
При попадании значений параметров в область неустойчивости переходные процессы в системе расходятся до насыщения по максимальной мощности, что приводит к перегреву аппаратуры, аварии, взрыву и другим, нежелательным или катастрофическим последствиям.
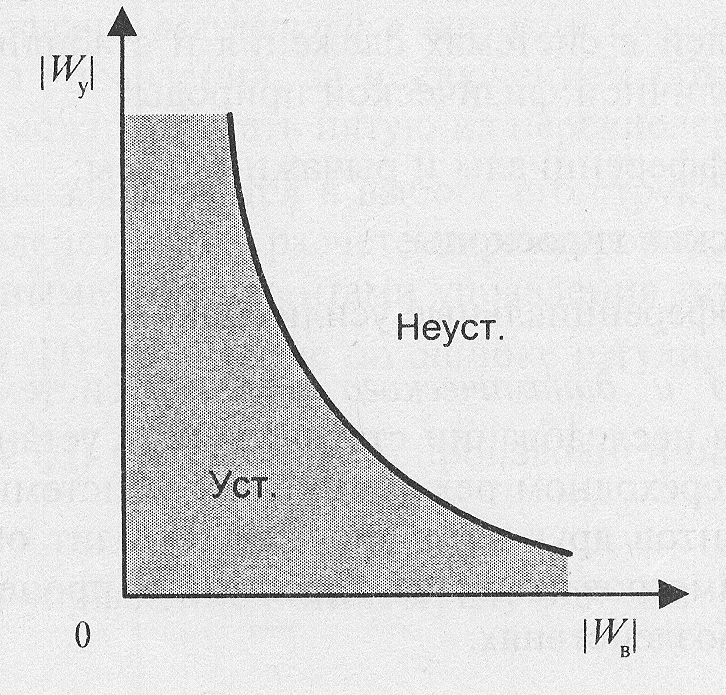
Рис. 1.5 Область
устойчивости в плоскости
параметров
![]() .
.