

2.8 Оборудование для проекционной фотопечати
Оборудование для проекционной фотолитографии.
Основные параметры установок проекционной ф/л - размер минимального элемента, рабочее поле
экспонирования, диаметр обрабатываемых подложек – непосредственно зависят от оптических
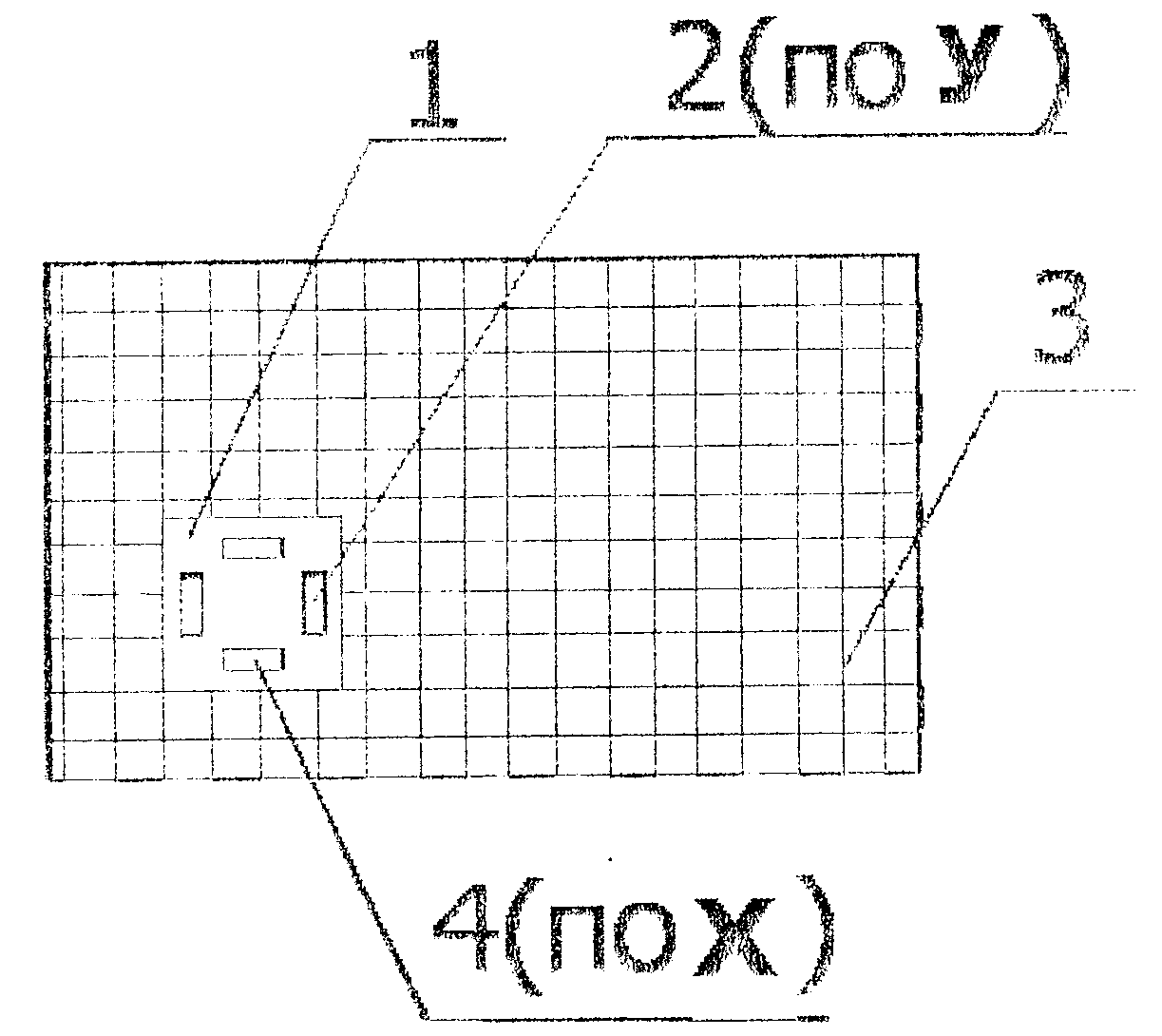
характеристик проекционной системы. Важнейшим элементом проекционной системы является объектив. Объектив должен иметь минимальную аберрацию, высокую разрешающую способность, большое рабочее поле, обеспечивать по всему полю постоянный масштаб увеличения и разрешения. В установках с масштабом проецирования 1:1 применяют высокоразрешающие объективы с небольшим рабочим полем. Экспонирование всей поверхности подложки в таких установках проводят методом мультиплицирования. В установках с переносом на подложку уменьшенного изображения топологии шаблона (М5:1; 10:1) применяется только метод шаговой мультипликации изображения. Автоматическая установка совмещения и мультипликации модели ЭМ-584 предназначен для проекционного помодульного переноса в масштабе 10:1 изображений промежуточных фотооригиналов (ПФО) на подложку. Подложка после предварительной ориентации по базовому срезу поступает на вакуумный подложкодержатель координатного стола.
Точная ориентация производится на координатном столе относительно измерительного шаблона.
Фотоэлектрический микроскоп фиксирует совмещение реперных знаков на подложке и проецируемых на неё через объектив знаков на измерительном шаблоне.
В момент совмещения знаков микроскоп даёт сигнал координатной измерительной системе для отсчёта и запоминания координат знаков.
После точной ориентации измеряются координаты всех пяти - девяти реперных знаков подложки. По результатам измерения мини ЭВМ рассчитывает и запоминает коэффициенты масштабных искажений в участках подложки. Коэффициенты неортогональности осей X и У, задаваемых знаками. Это позволяет учесть возможность деформации подложки.

1 - блок освещения
2 - корпус
3 - блок совмещения
4 - окуляр
5 - плита
6 - тумба
7 - пульт управления
8 - блок автоматической загрузки
9 - стойка управления
10-дисплей
Блок освещения 1 установлен на корпусе 2, внутри которого размещены основные элементы оптической системы: датчик положения ПФО и измерительного шаблона, фотоэлектрический микроскоп, входящие в блок совмещения 3, а также датчик фокусировки. Окуляр 4 используется при контроле наличия реперных знаков в поле зрения микроскопа. Основанием установки является тумба 6, на которую через промежуточные виброопоры установлена плита 5. На плите закреплен привод механизма фокусировки, перемещений координатного стола с подложкой в вертикальном положении, и портал с держателем объектива - все эти механизмы закрыты кожухами. На переднем торце плиты 5 размещены: пульт управления 7 и блок автоматической загрузки подложки 8.
Привод подъема стола.

1 - электродвигатель
2 - червячный редуктор
3 - шток
4 - кулачок
5 - рычаг
6 - шарнир
7 - шарнирная опора
8 - статор координатного стола
9 - индуктор
Координатный стол установки выполнен на базе линейного шагового двигателя (ЛШД), принцип действия основан на непосредственном преобразовании электромагнитной энергии в поступательное перемещение индуктора, размещенного на магнитновоздушной подвеске над плоской плитой статора.
Схема двухкоординатного линейного шагового двигателя.

1 - индуктор
2 - магниты
3 - канавки
4 - жиклер
5 - лента из диабаза
6 - статор координатного стола
Схема размещения индуктора на статоре.
1 - индуктор
2 - магнитопровод Y
3 - канавки
4 - магнитопровод X
Схема этапов работы ЛШД

1,2,3,4 - Зубья
5 – Обмотка возвуждения
6 - магнитопровод обмотки А
7 - постонный магнит
8 - Обмотка возвуждения
9 - магнитопровод обмотки В



Статор изготовлен из диабаза с наклеенным на нем листом из магнитомягкой стали, на верхней поверхности которого вдоль осей X и У нарезании канавки 3. Канавки заполнены немагнитным компаундом, после чего проводится шлифовка, неплоскостность 5 мкм. Индуктор 1 выполнен в виде группы магнитов 2, заключённый в общий корпус - постоянный магнит 7. Магнитопроводы 6,9 и обмотки управления 5,8, для управления перемещения и позиционирования индуктора относительно пластины статора используется сила магнитного взаимодействия между ними.
Зазор между индуктором и пластиной (15-25 мкм.) создаётся благодаря уравновешиванию сил притяжения, создаваемых постоянными магнитами и сил отталкивания, создаваемых сжатым воздухом, подаваемым под давлением 3*105 Па. Через жиклер 4. Это обеспечивает:
Исключение механического трения.
Точность позицинирования.
При. возбуждении обмотки управления А магнитный поток постоянного магнита переключается в зубец 2, который устанавливается против зубца пластины. Отключение обмотки А и возбуждение обмотки В приводит к переключении магнитного потока в зубец 3 и перемещению индуктора вправо на ¼ периода зубчатой структуры пластин. При изменении направления тока в обмотке А и отключении тока в обмотке В магнитной поток снова перемещается в зубец 1, а индуктор перемещается вправо на ¼ периода зубчатой структуры пластин. Далее изменяется направление тока в обмотке В и отключается ток в обмотке А. Магнитный поток переключается в зубец 4, индуктор перемещается вправо на ¼ периода зубчатой структуры пластин. Затем коммутация обмоток управления повторяется в том же порядке, обеспечивая движение индуктора вправо. Для передвижения влево изменяется порядок коммутирования обмоток управления. Перемещение индуктора вдоль оси У осуществляется аналогично, только коммутируется магнитопровод по У.
Дискретность перемещений может быть повышена за счёт квантования тока в обмотках управления, например четырёхфазный ЛШД с периодом зубчатой структуры 480 мкм и числом уровней квантования 48 будет иметь шаг перемещения 10 мкм. Регулировка частоты питающего тока позволяет обеспечить разгон и торможения индуктора с ускорением 9.8 м/с2 при максимальной скорости перемещения 100-300 мм/с.

Схема датчика координатной измерительной системы

Дифракционная решетка
Стол
Держатель
Уголковый отражатель
5,8- отражающие зеркала
6- Датчик
7- Гелеонеоновый лазер
9 –телескопический расширитель лазера
10 - лазерный луч
11 - выходной пучок
12, 13, 14 - светоделительные зеркала
15 линзы
16 - растры
I - вспомогательный канал
II, III — рабочий канал
Координатная измерительная система контролирует положение координатного стола с подложкой относительно проекционного объектива. Для этого производится преобразование механических перемещений стола в электрические сигналы, которые используются для управлением приводом стола. Система включает в себя два канала преобразования перемещений по оси У и один канал по оси X, что позволяет контролировать также угловой разворот стола 2. Все три преобразователя перемещений построены идентично, каждый из них содержит лазерный излучатель, прозрачную дифракционную решётку, уголковый отражатель, закреплённый на держателе объектива 3, датчик 6, зеркало 5. В среднем датчике используется также отклоняющие зеркала 8.
Луч He-Ne лазера после телескопического расширителя 9 проходит сквозь отверстие датчика 6 и под углом 42' к горизонтальной плоскости падает на дифракционную решётку 1. Дифракция лазерного луча на решётке приводит к появлению нескольких максимумов освещённости, расходящихся под разными углами φ к направлению падения лазерного луча. Эти углы могут быть рассчитаны по формуле sin Y=mλ/d. Где λ=0,63 мкм - длинна волны He-Ne лазера, d - шаг дифракционной решётки, m=0,1,2 порядок дифракции. Так при d= 4 мкм для используемого лазерного излучения максимум нулевого порядка лежит на направление лазерного луча, максимумы 1,2 порядков составляют с этим направлением углы 9 и 18° соответственно.
Пучки расходящиеся под углом 9° отражаются от зеркальных поверхностей угловых отражателей 4, закреплённых на неподвижном держателе объектива, и возвращаются на дифракционную решётку. После повторной дифракции пучков снова образуется несколько дифракционных максимумов, расходящихся под разными углами относительно падающих на решётку пучков. Максимумы 1 -го порядка каждого из этих пучков распространяется вдоль направления падающего на решётку лазерного луча 10, при этом они накладываются друг на друга, формируя единый выходной пучок 11, этот пучок идёт под углом 42* к горизонтальной плоскости и составляет угол 1°24' с подающим лучом 10. Поскольку формирующие пучок 11 лучи когерентны они интерферируют между собой, образуя систему интерференционных полос максимальной и минимальной освещённости. Светоделительные зеркала 12,13,14 направляют пучок 11 на линзу 15 вспомогательного (I) и двух рабочих(II и III) каналов датчика 6. Линзы 15 фокусируют пучок на светочувствительных площадках фотодиодов датчика. В каналах II и III перед линзами установлены растры 16. Они выполнены в виде наборов прозрачных и непрозрачных линий одинаковой ширины с шагом 1 мм, установленных параллельно интерференционным полосам пучка 11. При смещении интерференционных полос поперёк растров происходит модуляция светового потока, попадающего в фотоприёмник. Это приводит к появлению синусоидальной переменной составляющей в сигнале фотоприёмника. Для контроля направления перемещения стола переменные составляющие должны иметь фазовый сдвиг, равный 90°. Такой сдвиг обеспечивается за счёт смещения растра, установленного в канале III в направлении, перпендикулярном направлению штрихов. При настройке системы ширину интерференционных полос можно регулировать разворотом уголкового отражателя 4.