

59
Рис.4.72 Тесты ошибки определения скорости при конечноразностной миграции, соответствующей наклону 15°. Входная сумма и желаемая миграция показаны на рис.4.57. Схематическое изображение результатов миграции при- ведено на рис.4.73.
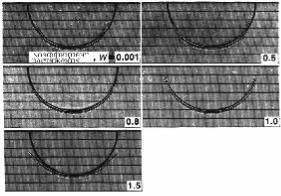
Рис.4.73 Эффекты недомиграции и перемиграции по рисункам 4.71 и 4.72. В = наклонное отражение перед желаемой миграцией; А = наклонное отраже- ние после желаемой миграцией; D = дифрагиро- ванная волна перед конечноразностной миграцией; D′ = дифрагированная волна после конечноразно- стной миграцией; L = ниже скорости в среде; Н = выше скорости в среде (в процентах).
4.3.3Пространственная миграция
Вобласти частот и волновых чисел реализуются два различных метода мигра- ции. Метод Stolt обеспечивает среду с по- стоянной скоростью, а метод смещения по фазе является таким для среды с измене- ниями скорости по вертикали. Метод Stolt
может быть распространен на случай среды
спроизвольной скоростью (произвольной до момента, пока миграция во времени яв- ляется действительной).
W – коэффициент растяжения Stolt
Сначала рассмотрим практические аспекты метода Stolt. Согласно обсуждению в Разделе 4.2.3, обобщенный метод мигра- ции Stolt включает преобразование времен- ного разреза в разрез приблизительно по- стоянных скоростей, который затем мигри-
руется по алгоритму постоянных скоростей Stolt. Это преобразование, в сущности, представляет собой растяжение в верти- кальном направлении (во времени). После того, как разрез мигрирован в растянутой
60
области, он снова преобразуется в первоначальную временную область. Следует различать обоб-
щенный метод Stolt и алгоритм с постоянной скоростью. Последний является точным для наклонов 90° в случае среды с постоянной скоростью. Обобщенный метод прибли- зительно учитывает вариации скоростей путем растяжения разреза.
Рис.4.74 Изменение коэффициента растяжения W приво- дит к изменению импульсного отклика оператора мигра- ции, соответствующего 90°. Для сопоставления желае-
мый отклик наложен на импульсный отклик миграции
Stolt.
Растяжение определяется коэф- фициентом W. В своей статье Stolt (1978) обсуждает реализацию коэффи- циента W. Хотя W представляет собой сложную функцию переменных скоро- сти и координаты растяжения, он часто
задается равным скалярной величине (Приложение С.4). Теоретически W из- меняется от 0 до 2. Чтобы получить представление о действии коэффициен- та растяжения, обратимся к импульс- ным откликам на рис.4.74, где отдель- ный импульс на отдельной трассе миг-
рирован с использованием различных коэффициентов растяжения. Здесь W = 1 соответствует
алгоритму Stolt с постоянной скоростью. Задавая W<1, мы сжимаем импульсный от- клик вовнутрь вдоль его сильно наклоненных флангов; при W>1 импульсный отклик раскрывается. Следовательно, величина W частично контролирует апертуру обобщен- ного алгоритма Stolt. Чем больше W отличается от 1, тем более ограниченной становит- ся апертура. Величина W<1 подразумевает недомиграцию при более сильных наклонах; при W>1 происходит перемиграция при больших наклонах, если скорость в среде по- стоянная. При использовании коэффициента растяжения отличного от 1, алгоритм Stolt пытается имитировать волновой фронт в среде с изменяющейся скоростью (Stolt, 1978), подвергая риску способность мигрировать более сильные наклоны. Опыт работ пока- зывает, что миграция Stolt с растяжением дает приемлемые результаты при условии, что скорости изменяются в пределах миграции во времени.
61
Рис.4.75 Влияние коэффициента растяжения на результат миграции. W < 1 приводит к недомиграции; W > 1 обу- славливает перемиграцию (моделирование выполнено Union Oil Company).
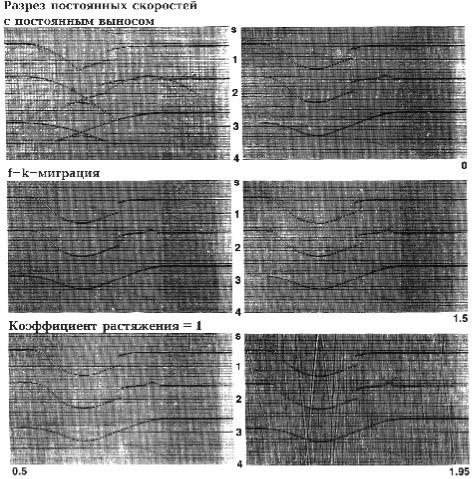
Рассмотрим модель разреза и результаты миграции на рис.4.75. Коэффициент растяжения W = 1 дает лучший мигрированный разрез, т.к. разрез с нулевым выносом
был выведен с использованием постоянной скоростью. При 0 < W < 1 алгоритм форми- рует недомигрированный разрез; при 1 > W > 2 получается перемигрированный разрез. Эти наблюдения согласуются с импульсными откликами на рис.4.74. Почти вертикаль- ные полосы на разрезе с W = 1.95 являются следствием эффектов wraparound.
Обобщенный алгоритм Stolt формирует лучший результат при W = 1 при усло- вии, что скорость постоянная. Поскольку в действительности так не бывает, исследуем алгоритм для среды, где скорость изменяется в вертикальном направлении. На рис.4.76 показаны импульсные отклики для различных величин W. Скорость изменяется линей- но между t = 0 и t = 4с от 2000м/c до 4000м/с. Для различных величин W части волно- вых фронтов, которые дают наилучшее совпадение с результатом миграции со смеще- нием по фазе, располагаются между двумя толстыми линиями. Для среды со скоро- стью, изменяющейся в вертикальном направлении, величина W=1 уже не является оп- тимальной. На рис.4.76 дает хорошую точность в самом широком диапазоне изменения углов наклона при W = 0.6. В общем случае, чем больше градиент скорости, тем больше W отличается от 1. Строго говоря, оптимальная величина W на разных временах имеет различные значения. На практике графики волновых фронтов, подобные рис.4.76, мож- но сформировать, используя методы смещения по фазе и Stolt для региональной скоро- стной функции, изменяющейся в вертикальном направлении. Величина W, которая дает
62
лучшее совпадение при наибольшей угловой апертуре, затем используется для мигра- ции данных по методу Stolt.
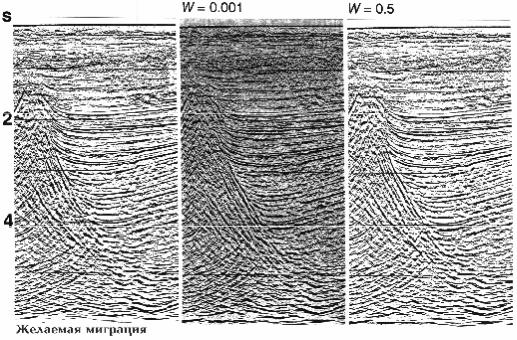
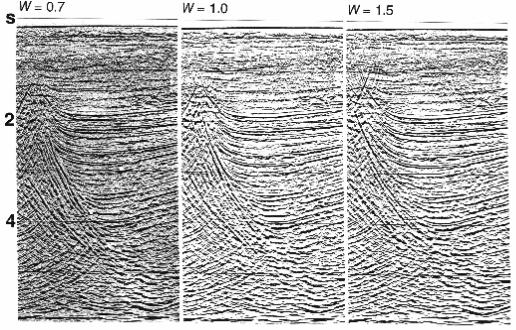
На рис.4.77 и 4.78 показана миграция суммы ОСТ, представленной на рис.4.57 с использованием различных значений W. Скорости миграции изменяются только в вер- тикальном направлении. На рис.4.79 в схематическом виде показаны результаты ми- грации для дифрагированной волны D и наклонного отражения В, смещенного от флан- га соляного купола. наилучшее совпадение желательной миграции и метода Stolt полу- чено при W = 0.5.
Рис.4.76 Влияние коэффициента растяжения при мигрировании со скоростной функцией, изменяющейся в верти- кальном направлении.
Остаточная миграция
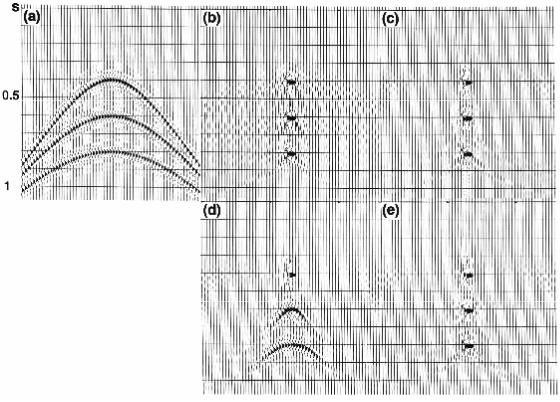
Хотя алгоритм Stolt с постоянной скоростью может показаться чисто академиче- ским экзерсисом, он имеет практическое значение. Рассмотрим разрез с нулевым выно- сом, который состоит из трех точечных рассеивающих объектов в слоистой модели разреза (рис.4.80а). Параметры модели представлены на рис.4.61. Конечноразностная миграция испытывала проблемы, сжимая эти дифрагированные волны (рис.4.80b). Как мы можем улучшить работу конечноразностного метода, соответствующего 15- градусному наклону в присутствии больших наклонов? Нужно уменьшить кажущийся наклон, воспринимаемый миграцией (Rothman и др., 1985). Сначала мы мигрируем раз- рез с нулевым выносом по алгоритму Stolt с постоянной скоростью, который использу- ет в функции v(z) минимальную величину 2000м/с. Результат показан на рис.4.80d. За- тем мы снова мигрируем этот разрез (рис.4.80е), используя подходящую остаточную (residual) скорость (Приложение С.5) и конечноразностной метод соответствующий на- клону 15°. Сравнивая с одношаговой конечноразностной миграцией (рис.4.80b), можно видеть исключительно высокие рабочие характеристики остаточной миграции. Срав- ним с желаемой миграцией, которая была получена по методу смещения по фазе (рис.4.80с). В Приложении С.5 остаточная миграция рассматривается с математической точки зрения.
63
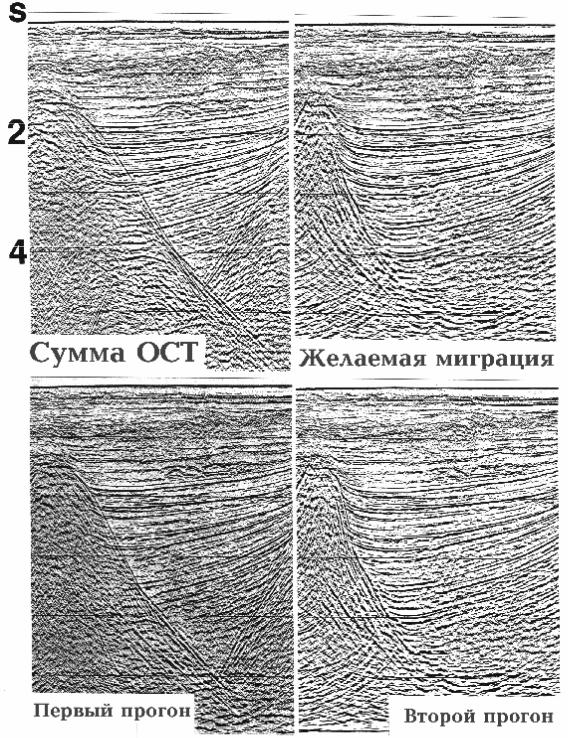
На рис.4.81 показан пример полевых данных, а на рис.4.82 в схематическом виде представлены результаты миграции. Результат одношаговой конечноразностной ми- грации характеризуется типичной недомиграцией (рис.4..58). Миграция Stolt с посто- янной скоростью 1500м/c, сопровождаемая конечноразностной миграцией, дает резуль- тат, достаточно близкий к желаемой миграции. Этот желаемый результат был получен методом смещения по фазе, который является более дорогостоящим по сравнению с сочетанием алгоритмов Stolt с постоянной скоростью и конечноразностной миграции, соответствующей наклону 15°.
Рис.4.77 Влияние коэффициента растяжения на миграцию. Входная сумма показана на рис.4.57а.
Ограничение остаточной миграции состоит в том, что адекватная миграция не всегда может быть доступна. Это показано на рис.4.81, где после остаточной миграции отражение от наклонной поверхности несколько недомигрировано (см. схему на рис.4.82). Недомиграция имеет место вследствие того, что кажущийся наклон, воспри- нимаемый вторым прогоном миграции, может оказаться слишком большим, чтобы им можно было точно оперировать. Второй прогон миграции обычно выполняется с при- менением конечноразностного алгоритма, ограниченного по углу наклона. Из уравне- ния (С.9b) можно видеть, что чем меньше скорость, используемая в миграции, тем меньше угол наклона, воспринимаемый миграцией. Следовательно, если остаточная скоростная функция, данная в уравнении (С.63), не слишком отличается от первона- чальной скоростной функции (вследствие вертикального градиента), остаточная мигра- ция может оказаться неадекватной.
Максимальный мигрируемый наклон
Рассмотрим метод смещения по фазе Gazdag, который представляет собой дру- гой тип f-k-миграции (Раздел 4.2.3). Этот метод является подходящим для практическо-
64
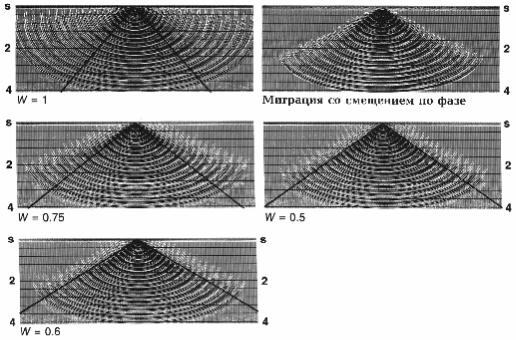
го применения, поскольку он допускает изменения скорости в вертикальном направле- нии и обеспечивает точность для наклонов до 90°. На рис.4.83 показан импульсный от- клик алгоритма смещения по фазе. Как и в случае метода суммирования Кирхгоффа,
миграция по методу смещения по фазе может быть ограничена меньшими наклонами путем усечения полукруглого волнового фронта. Эта возможность фильтрации по углу наклона является полезной при подавлении когерентных помех, когда выполняется ми- грация суммированного разреза. С другой стороны, если действие миграции ограниче- но малыми наклонами, сильно наклоненные отражающие поверхности могут оказаться непреднамеренно отфильтрованными. Краевые эффекты также являются выраженны- ми, когда пропускается очень узкий диапазон углов наклона. Обратите внимание на прямые полосы на импульсном отклике, где предел по наклону равен 2мс на трассу (рис.4.83). На примере полевых данных (рис.4.84), где максимально допустимый на- клон равен 2мс на трассу, обусловил размывание и удаление, по существу, всех сигна- лов, содержащихся в разрезе.
Размер шага по глубине
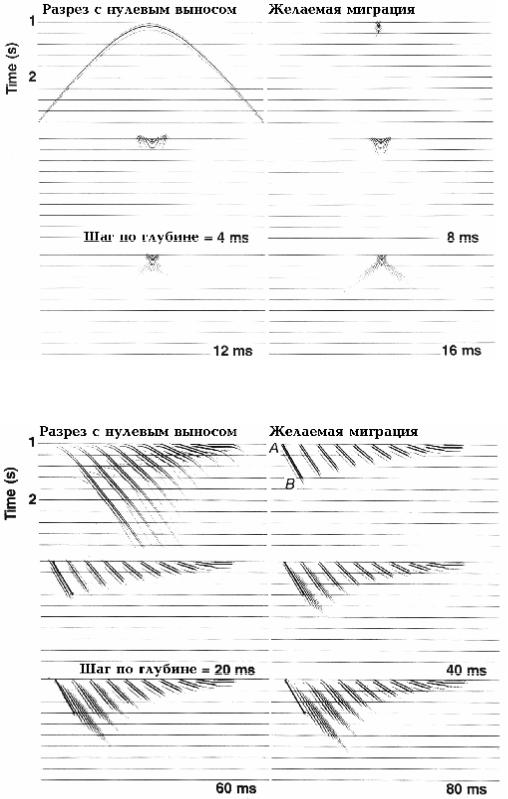
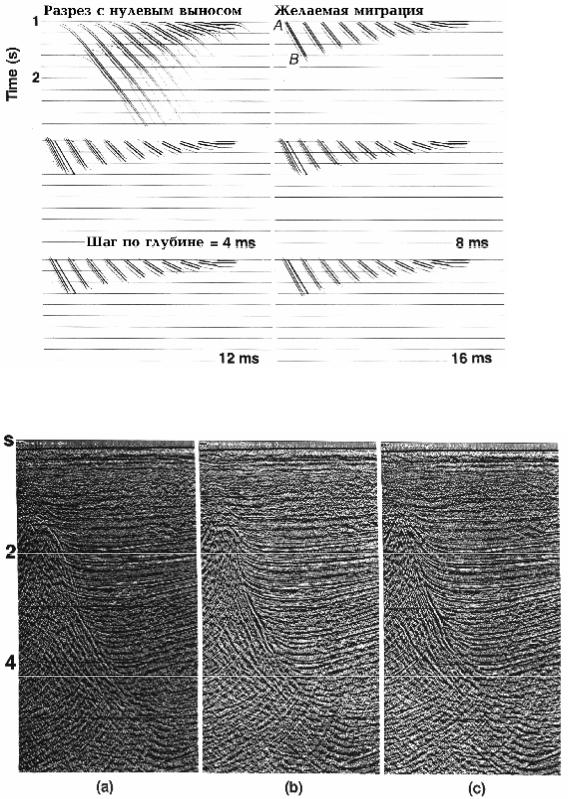
На рис.4.85 представлена модель отражений от наклонных поверхностей, миг- рированная методом смещения по фазе с использованием различных шагов по глубине. Поскольку метод смещения по фазе основан на дисперсионном соотношении [уравне- ние (С.28)] волнового уравнения для случая пробега в одном направлении, мы не ожи- даем недомиграции. Однако, мы видим разрывы вдоль отражающих поверхностей с ин- тервалами, равными шагу по глубине. Это напоминает результаты конечноразностной миграции. Как и в случае конечноразностных алгоритмов, возникает проблема вдоль более сильных наклонов; следовательно, для больших наклонов требуется уменьшить шаг по глубине (рис.4.85). Поскольку сейсмические данные по своей природе характе- ризуются ограниченной полосой пропускания, в очень малых шагах по глубине нет не- обходимости. Миграция с шагом 20мс формирует разрез без ложных изломов вдоль от- ражающих поверхностей; это сопоставимо с результатами желаемой миграции. Хотя это и не показано, меньшие шаги по глубине дают результаты, которые, в сущности, идентичны результатам, полученным при шаге 20мс.

65
Рис.4.78 Влияние коэффициента растяжения W имеет место перемиграция. Входная сумма показана на рис.4.57а. Желаемая миграция показана на рис.4.77.
Рис.4.79 Комбинированный результат миграции на рис.4.77 и 4.78. Здесь В = наклонное отражение до же- лаемой миграции; А = тоже самое после желаемой ми- грации; D и D′ - дифрагированная волна соответственно до и после миграции Stolt с растяжением. Числа пред-
ставляют различные значения коэффициента растяжения
W.
66
Рис.4.80 Принцип остаточной миграции. (а) Разрез с нулевым выносом; (b) конечноразностная миграция соответствующая наклону 15°; (с) желаемая миграция, использующая метод смещения по фазе; (d) миграция
Stolt с постоянно скоростью v = 2000м/с; (е) изображение (d) после конечноразностной миграции, соответствующей наклону 15°.
67
Рис.4.81 Остаточная миграция, примененная к полевым данным. Первый прогон: миграция Stolt с постоянной скоро- стью (1500м/с); второй прогон: конечноразностная миграция, соответствующая 15° результата первого прогона. Сравните с желаемой миграцией.
68
Рис.4.82 Результаты комбинированной миграции на рис.4.81. Здесь В и А – наклонные отражения соот- ветственно до и после желаемой миграции; D = ди- фрагированная волна; А1, D1 = после первого прого- на; А2, D2 = после второго прогона.
Рис.4.83 Импульсный отклик оператора f-k-миграции принимает вид усеченного полукруга, когда накладыва- ется ограничение по максимальному наклону. Для срав- нения желаемый отклик наложен на f-k-отклик.
Рис.4.84 Тесты максимального мигрируемого наклона при миграции методом смещения по фазе. Слишком малый предельно допустимый наклон может оказать неблагоприятное воздействие на миграцию.

69
Рис.4.85 Влияние шагов по глубине от 20 до 80 мс на результаты миграции методом смещения по фазе наклонных ОП.
Рис.4.86 Влияние шагов по глубине от 20 до 80 мс на результаты миграции методом смещения по фазе полевых дан- ных.
70
Тесты размеров шага по глубине показаны на рис.4.86. В отличие от конечно- разностной миграции, все результаты миграции методом смещения по фазе с различ- ными шагами по глубине дают равно адекватные результаты. Единственная проблема, связанная с большими шагами по глубине, - это изломы вдоль поверхностей, характе- ризующихся значительными наклонами. В принципе, если отсутствует неоднознач- ность в направлении z, изломы можно удалить процессом локальной интерполяции. На практике шаг по глубине при миграции методом смещения по фазе берется от полови- ны до полного видимого периода волнового поля, т.е. от 20 до 40мс, в зависимости от наклонов, присутствующих в разрезе.
Ошибки определения скорости
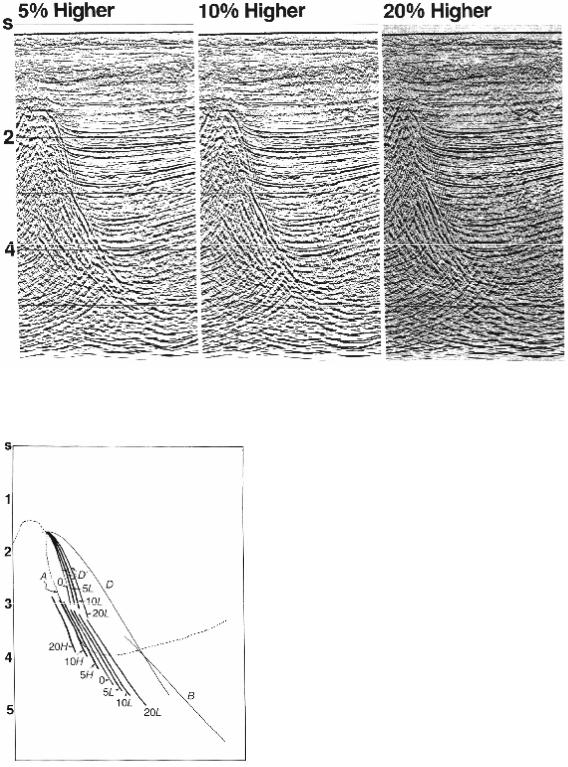
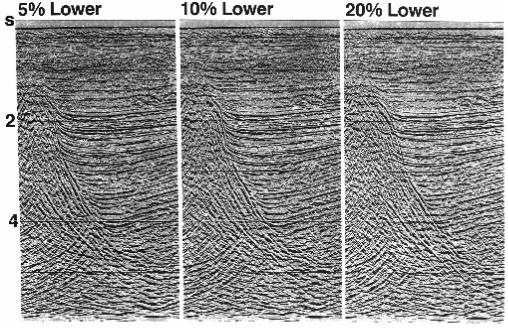
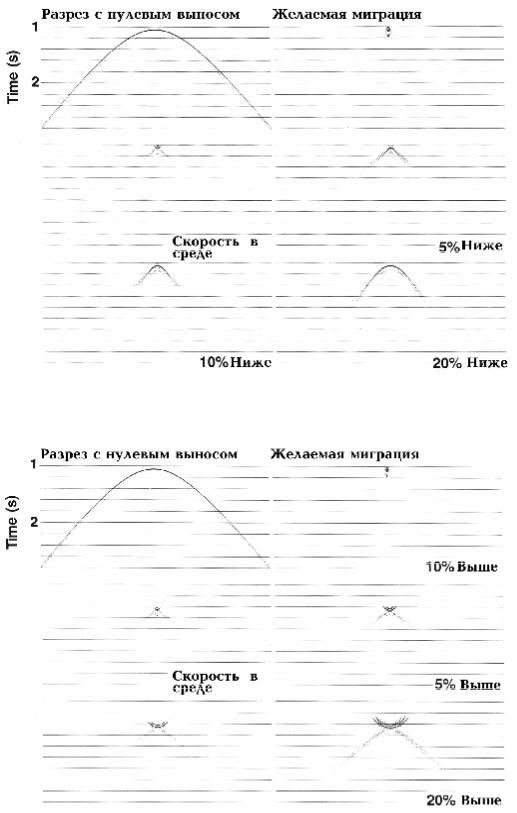
Метод смещения по фазе так же реагирует на ошибки определения скорости, как и метод суммирования Кирхгоффа. Все примеры синтетических моделей для миграции Кирхгоффа можно рассматривать как тесты для метода смещения по фазе (рис.4.49 – 4.52). На рис.4.87 и 4.88 приведены примеры полевых данных, в которых использованы слишком низкие и слишком высокие скорости. На рис.4.89 в схематическом виде пред- ставлены результаты этих миграций. Хорошо видно, что слишком низкие скорости обуславливают недомиграцию наклонных отражений и неполное сжатие дифрагиро- ванных волн. С другой стороны, слишком высокие скорости приводят к перемиграции наклонных отражений. Сопоставление результатов на рис.4.89 и 4.73 показывает, что алгоритм, ориентированный на большие наклоны, такой как f-k-метод, более чувстви- телен к ошибкам определения скорости, нежели алгоритм, ориентированный на малые наклоны (например, конечноразностной метод, основанный на параболическом уравне- нии). Обратите внимание на большее отклонение наклонного отражения от его истин- ного положения А, когда скорость на 20% больше нормальных скоростей миграции (рис.4.89), если сравнивать с результатом конечноразностной миграции.
Рис.4.87 Тесты ошибок определения скорости в миграции методом смещения по фазе; недомиграция обусловлена использованием слишком низких скоростей. Входная сумма и желаемая миграция показана на рис.4.57.
4.3.4 Частотно-пространственная миграция
71
В предыдущих разделах были исследованы практические аспекты конечнораз- ностного метода, суммирования Кирхгоффа и f-k-миграции. Все эти методы обладают некоторыми достоинствами и недостатками. Мы видели, что метод суммирования Кирхгоффа может оперировать наклонами до 90°, но имеет ограничения по вариациям скоростей в латеральном направлении. Конечноразностные методы, основанные на па- раболической аппроксимации скалярного волнового уравнения, может оперировать на- клонами только до 35°. С другой стороны, эти методы не имеют проблем в случае ско- ростей, изменяющихся в латеральном направлении. Методики, работающие в частот- ной области, не имеют ограничений по углу наклона, но не могут работать в случае значительных изменений скоростей.
В этом разделе мы рассмотрим другую конечноразностную методику, которая может оперировать большими наклонами и всеми типами изменений скоростей. Обсу- ждение с математической точки зрения приводится в Приложении С.3. Метод реализо- ван в гибридной области (hybrid domain) частоты – пространства (ω, х); следовательно, он обычно упоминается как омега-х метод или f-x метод. Уравнение, соответствующее наклону 15° (15-degree equation), выведено из разложения в ряд Тэйлора дисперсионно- го соотношения [уравнение (С.29)]. Омега-x метод основан на разложении в ряд непре- рывной дроби [уравнение (С.42)], что позволяет угловую аппроксимацию в более ши- роких пределах. Kjartansson (1979) реализовал уравнение, соответствующее наклону 45° для моделирования и миграции. Это уравнение может обеспечивать точность для наклонов до 65°; для этого нужно лишь подобрать некоторые коэффициенты (Прило- жение С.3). Операторы высшего порядка можно получить путем последовательного применения ряда таких операторов, как оператор, соответствующий наклону 45° (Ма, 1981) с другим набором коэффициентов (Lee и Suh, 1985) (рис.4.90).
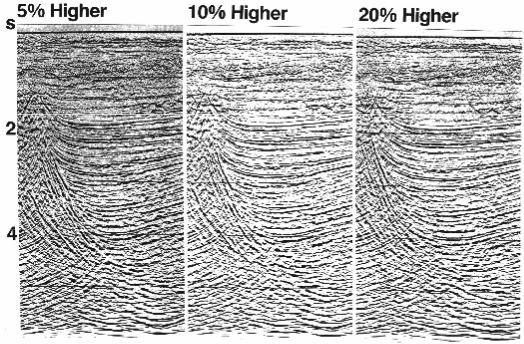
Рис.4.88 Тесты ошибок скоростей в миграции методом смещения по фазе; перемиграция вызвана использованием слишком низких скоростей. Входная сумма и желаемая миграция показаны на рис.4.57.
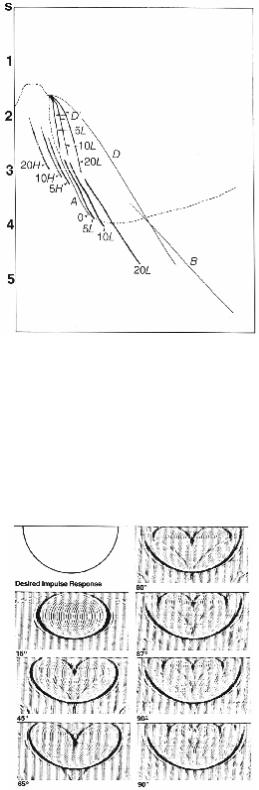
Рис.4.89 Комбинированные результаты миграции на рис.4.87 и 4.88. В и А – наклонное отражение соот- ветственно до и после желаемой миграции; D = ди- фрагированная волна; L = скорость ниже, чем ско- рость в среде; Н = скорость выше, чем скорость в среде.
72
Как было рассмотрено в Разделе 4.3.2, наиболее важным параметром в ко-
нечноразностных методах является размер шага по глубине, который используется при –продолжении вниз волнового поля, зарегистрированного на поверхности. Мы хотим выбрать оптимальный шаг, доста- точно большой (из экономических сооб- ражений), который, тем не менее, давал бы приемлемую ошибку определения поло- жения отражений после миграции.
Уравнение, соответствующее накло- ну 15°, ведет себя несколько иначе, чем уравнение, соответствующее наклону 45° при изменении шага по глубине. Снова исследуем результаты тестов, выполнен-
ных на наклонных отражениях и моделях дифрагированных волн (Раздел 4.3.2), ис- пользуя конечноразностной алгоритм, со- ответствующий наклону 15°. Повторяя те же самые тесты с применением f-x- алгоритма, соответствующего наклону 65°, получим результаты представленные на рис.4.91 – 4.96.
При больших шагах по глубине алгоритм недомигрирует годограф дифрагиро- ванной волны (рис.4.91), как в случае наклона 15° (рис.4.59). При малых шагах по глу- бине (4 – 16мс) алгоритм приводит к перемиграции годографа дифрагированной волны (рис.4.92) в отличии от уравнения, соответствующего наклону 15° (рис.4.60).
|
При увеличении шага по глубине |
|||
|
большие |
наклоны |
недомигрируются |
|
|
(рис.4.93), |
как в случае |
наклона 15° |
|
|
(рис.4.63). Для сравнения отражение с |
|||
|
наибольшим наклоном AB наложено на |
|||
|
результаты |
миграции, |
использующей |
|
|
различные шаги по глубине. При малых |
|||
|
шагах (4 – 16мс) происходит перемигра- |
|||
|
ция более крутых наклонов (рис.4.94), в |
|||
|
отличии от уравнения, соответствующе- |
|||
|
го наклону 15° (рис.4.64). Обратите так- |
|||
|
же внимание, что на всех результатах |
|||
|
конечноразностной миграции, независи- |
|||
|
мо от ограничения по углу наклона, |
|||
|
имеются знакомые |
нам дисперсионные |
||
|
помехи (рис.4.91 и 4.93). Сравнение со |
|||
Рис.4.90 Импульсный отклик операторов частотно- |
случаем наклона 15° (рис.4.59 и 4.63) |
|||
пространственной миграции с различными степенями |
предполагает, что рабочие характеристи- |
|||
аппроксимации волнового уравнения, соответствую- |
ки |
|
|
|
щего пробегу в одном направлении (теоретическая |
|
|
|
|
основа изложена в ПриложенииС.3).
уравнения, соответствующего наклону 45° с точки зрения дисперсионных помех и недомиграции ненамного лучше, чем у уравнения, соответствующего наклону 15°. Это, в частности, верно для сильных наклонов, миг-
рированных с большими шагами по глубине. Теоретически, дифференциальное уравнение, соответствующее наклону 45°, является более точным, чем дифференциальное уравнение, соответствующее наклону 15°. Одна-
73
ко, после дискретизации разность рабочих характеристик двух уравнений может уменьшиться (Diet и Lailly 1984). Хорошая программа конечноразностной миграции использует схемы нахождения конечных приращений, которые сохраняют точность по углу наклона подразумеваемую соответствующим дифференциальным уравнением.
Очевидно, что аппроксимация высшего порядка, например, уравнение, соответ- ствующее наклону 65°, дает меньшую свободу выбора оптимального шага по глубине по сравнению с уравнением, соответствующим наклону 15°. В частности, оптимальный шаг по глубине равен 20мс для показанных здесь моделей; любое отклонение от этой глубины может привести к недомиграции или к перемиграции. Однако, нет сомнения, что алгоритм, соответствующий наклону 65°, может мигрировать более сильные на- клоны и сжимать дифрагированные волны с большей точностью, нежели уравнение, соответствующее наклону 15° (сравните рис.4.59 и рис.4.91, рис.4.63 и рис.4.93; шаг по глубине равен 20мс).
На рис.4.95 показан пример полевых данных. Здесь данные были мигрированы с
тремя различными аппроксимациями (15°, 45°, 65°) в частотно-пространственной об- ласти. По мере перехода аппроксимации с большим углом сжатия дифрагированной волны приобретает более полный характер и сильно наклоненные отражения мигриру- ется точнее. Сравните эти результаты с желаемой миграцией на рис.4.57b. Обратите также внимание на аналогичные результаты, полученные по t-x-алгоритму, соответст- вующему наклону 15° (рис.4.57с) и алгоритму омега-х, соответствующему наклону 15° (рис.4.95а).
Сейчас рассмотрим тест ошибки определения скорости с использованием алго- ритма омега-х. Когда скорости ниже, чем скорость в среде, годограф дифрагированной волны становится недомигрированным (рис.4.96), но не на столько, как в случае урав- нения, соответствующего наклону 15° (рис.4.67). Когда скорость больше, чем скорость в среде, годограф дифрагированной волны становится перемигрированным (рис.4.97)
так же, как в случае уравнения, соответствующего наклону 15° (рис.4.68). Снова мы видим, что алгоритмы, ориентированные на большие наклоны, более чувствительны к ошибкам определения скоростей. Аналогичные заключения можно сделать для модели наклонных отражений (рис.4.98 и 4.99; сравните с рис.4.69 и 4.70).
Мы кратко рассмотрели методику конечноразностной миграции наклонов 65°, реализованную в частотно-пространственной области. На практике этот метод может быть использован для миграции наклонов до 80°. Другое важное преимущество этого
метода состоит в его исключительной способности оперировать любыми изменениями скоростей, как в вертикальном, так и в горизонтальном направлении. Его точность, в случае изменения скорости в латеральном направлении, обусловлена тем, что смеще- ние во времени, ассоциированное с элементом тонкой линзы [уравнение (4.16)], может быть точно реализовано в частотной области. По этой причине алгоритм больше под- ходит для миграции по глубине, которая требуется для получения изображения объек- тов, расположенных под сложными структурами (Раздел 5.2) и для получения трехмер- ного изображения разреза (Раздел 6.5 и Приложение С.8).
Важное преимущество миграции омега-х состоит в том, что каждая частота мо- жет быть обработана отдельно. Это свойство может значительно снизить требования, предъявляемые к памяти компьютера; следовательно, уменьшить количество операций ввода/вывода для больших набора данных, таких как трехмерные съемки. Кроме того, в миграции омега-х могут быть реализованы некоторые свойства точности. Например, экстраполяция формы волны может быть ограничена полосой пропускания сигнала оп- ределенной ширины. Каждая частотная составляющая может быть продолжена вниз с применением оптимального шага по глубине, который дает минимальную ошибку по фазе, ведущую к минимальному количеству дисперсионных помех на мигрированном разрезе.

74
Рис.4.91 Влияние шагов по глубине от 20 до 80мс на способность уравнения, соответствующего наклону 65° сжи- мать годограф дифрагированной волны. Обратите внимание на недомиграцию при больших шагах.
75
Рис.4.92 Влияние шагов по глубине от 4 до 16мс на способность уравнения, соответствующего наклону 65° сжимать годограф дифрагированной волны.
Рис.4.93 Влияние шагов по глубине от 20 до 80мс на способность уравнения, соответствующего наклону 65° мигри- ровать отражения от наклонных поверхностей. Обратите внимание на недомиграцию при больших шагах.
76
Рис.4.94 Влияние шагов по глубине от 4 до 16мс на способность уравнения, соответствующего наклону 65° мигри- ровать отражения. Обратите внимание на недомиграцию при малых шагах.
Рис.4.95 Частотно-пространственная миграция суммы ОСТ на рис.4.57а. Желаемая миграция показана на рис.4.57b. Обратите внимание, что при аппроксимации возрастающими углами качество изображения улучшается: (а) 15°; (b) 45°; (с) 65°.
77
Рис.4.96 Недомиграция годографа дифрагированной волны с применением уравнения, соответствующего наклону 65°; используются скорости меньшие, чем скорость в среде.
Рис.4.97 Перемиграция годографа дифрагированной волны с применением уравнения, соответствующего наклону 65°; используются скорости большие, чем скорость в среде.
78
Рис.4.98 Недомиграция наклонных отражений с применением уравнения, соответствующего наклону 65°; использу- ются скорости меньшие, чем скорость в среде.
Рис.4.99 Перемиграция наклонных отражений с применением уравнения, соответствующего наклону 65°; использу- ются скорости большие, чем скорость в среде.