

7.5. Теорема Кронекера-Капелли.
Запишем систему линейных уравнений (4.1) в векторном
виде
 ПустьАi=
ПустьАi=![]() -i-й
вектор-столбец нашей системы, i
= 1,…,n,
B
=
-i-й
вектор-столбец нашей системы, i
= 1,…,n,
B
=
![]() -
вектор из правой части системы. Тогда
наша система может быть записана в виде
одного векторного уравнения
-
вектор из правой части системы. Тогда
наша система может быть записана в виде
одного векторного уравнения
А1х1 + А2х2 +…+ Апхп= В. Очевидно, решение этого векторного уравнения существует тогда и только тогда, когда вектор В является линейной комбинацией векторов А1,…,Ап В <А1,…, Ап> <В, А1,…, Ап> <А1,…, Ап>
<В,А1,…,Ап>=<А1,…,Ап>
dim<В,
А1,…,Ап>=
dim<А1,…,Ап>
rg{В,А1,…,Ап}
= rg{А1,…,Ап}
rg
A
= rg![]() - ранг основной матрицы системы (4.1) по
столбцам равен рангу расширенной
матрицы. Этим мы закончили ещё одно
продвинутое (сравните с 4.3)
доказательство теоремы Кронекера-Капелли.
Далее мы увидим, что ранги матрицы по
столбцам и по строкам совпадают.
- ранг основной матрицы системы (4.1) по
столбцам равен рангу расширенной
матрицы. Этим мы закончили ещё одно
продвинутое (сравните с 4.3)
доказательство теоремы Кронекера-Капелли.
Далее мы увидим, что ранги матрицы по
столбцам и по строкам совпадают.
7.6. Решение однородных систем линейных уравнений.
Мы рассматривали задание подпространств в L в виде линейных оболочек систем векторов. Рассмотрим второй способ задания подпространств. Пусть е = {e1,…,еn} – базис пространства L, 1,…,п фиксированные элементы из P.
Утверждение. Подмножество
L1 = {x = x1e1+…+ xnеn L |1x1 +…+nxn = 0} является
подпространством в L.
Доказательство. I. Пусть x = x1e1+…+ xnеn, у = у1e1+…+ + уnеn L1 1x1 +…+nxn = 0, 1у1 +…+nуn = 0
1(x1+у1)+…+n(xп+уп)=0, 1x1+…+nxn=0 х+у, xL1.
II. 2. Очевидно, 0L= 0e1+…+ 0еn L1, так как 10 +…+n0= 0.
Упражнение. Доказать, что не является подпространством в L подмножество {x= x1e1+…+xnеnL |1x1+…+nxn=1}.
Пусть Li={x=x1e1+…+xnеnL|i1x1+…+inxn=0}, i =1,…,m. Тогда подпространство ∩Li задается однородной системой линейных уравнений
 .
(7.1)
.
(7.1)
Это второй способ задания подпространств в L.
Пусть L=Pn. Тогда множество решений системы (7.1) является подпространством в P п. Найдем базис и размерность этого подпространства. С помощью элементарных преобразований приведем систему (7.1) к ступенчатому виду. Для простоты будем считать, что x1,…, xr – главные неизвестные, а xr+1,…, xт – свободные неизвестные, то есть матрица системы имеет следующий ступенчатый вид:
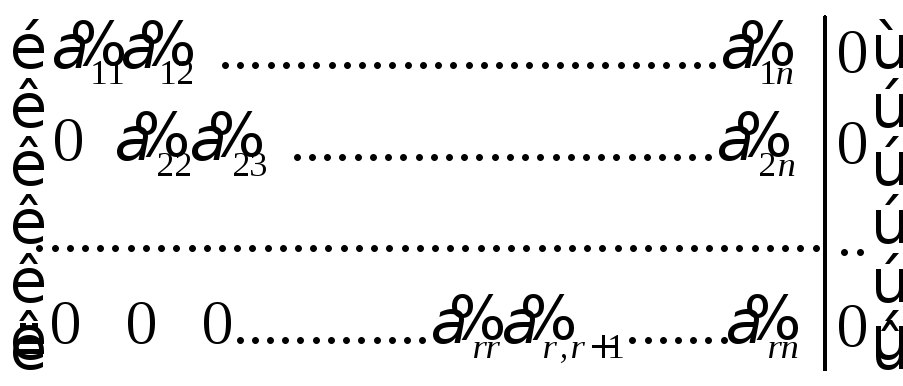 .
(7.2)
.
(7.2)
Будем придавать набору (п – r) свободных неизвестных значения (1,0,0,...,0,0), (0,1,0,…,0,0),…,(0,0,0,…,1,0), (0,0,0,…,0,1). После этого главные неизвестные находятся однозначно, и мы получим набор из (п – r) частных решений однородной
СЛУ
f1
= (*,*,…,*,1,0,0,...,0,0), f2
= (*,*,…,*,0,1,0,...,0,0),…, fn-r=
(*,*,…,*,0,0,...,0,0,1),
где звездочкой * обозначены какие-то
значения главных неизвестных. Покажем,
что f1,
f2
,…,fn-r
- базис в пространстве решений СЛУ (7.1).
Во-первых, строки f1,
f2,…,fn-r
– линейно независимы. Это доказывается
так же, как линейная независимость
строк матрицы
![]() из7.4.
Во-вторых, любое решение СЛУ (7.1) является
линейной комбинацией решений f1,
f2
,…, fn-r
. В самом деле, если решение системы f
= (с1,…,сr+1,...,
сn),
то линейная комбинация решений f0
= f
- сr+1
f1
- ... - сn
fn-r
принадлежит пространству решений,
причем f0
=
(*,…,*,0,…,0),
то есть у f0
все
свободные неизвестные равны нулю. Тогда,
решая СЛУ (7.2), получим, что все главные
неизвестные у f0
также
равны нулю, то есть f0
= 0, f
- сr+1
f1
- ...- сn
fn-r
= 0
f
= сr+1
f1
+...+сn
fn-r
. Таким образом, f1,
f2
,…,fn-r
- базис в пространстве решений СЛУ (7.1),
и размерность пространства решений
равна (п –
r).
из7.4.
Во-вторых, любое решение СЛУ (7.1) является
линейной комбинацией решений f1,
f2
,…, fn-r
. В самом деле, если решение системы f
= (с1,…,сr+1,...,
сn),
то линейная комбинация решений f0
= f
- сr+1
f1
- ... - сn
fn-r
принадлежит пространству решений,
причем f0
=
(*,…,*,0,…,0),
то есть у f0
все
свободные неизвестные равны нулю. Тогда,
решая СЛУ (7.2), получим, что все главные
неизвестные у f0
также
равны нулю, то есть f0
= 0, f
- сr+1
f1
- ...- сn
fn-r
= 0
f
= сr+1
f1
+...+сn
fn-r
. Таким образом, f1,
f2
,…,fn-r
- базис в пространстве решений СЛУ (7.1),
и размерность пространства решений
равна (п –
r).
Определение. Базис в пространстве решений однородной системы линейных уравнений называется фундаментальной системой решений (сокращенно ФСР).
Так как базисы в пространствах выбираются неоднозначно, то и ФСР выбираются неоднозначно. Мы показали, что
f1, f2 ,…,fn-r – ФСР для СЛУ (7.1). Любое линейно независимое семейство из (п – r) решений также является фундаментальной системой решений.
Лекция 16.