

8.2. Решение систем линейных уравнений (продолжение).
Запишем систему линейных уравнений (4.1) в виде
S
:
 .
.
И рассмотрим систему
S
:
 .
.
Очевидно, S S, и если уравнение F = 0 является следствием системы S, то S S, и S S. Более того, S S тогда и только тогда, когда уравнение F = 0 является следствием системы S. Это означает, что добавление к системе S или удаление из системы S уравнения, которое является следствием системы S, не меняет множества решений системы S. Чтобы сделать систему проще, естественно удалять из системы все уравнения, которые являются следствиями остальных уравнений.
Утверждение. Если F = 1F1+2F2+…+mFm , то уравнение F = 0 является следствием системы S, и S S.
Доказательство очевидно: любое решение системы S обращает в 0 все F1 , F2 ,…, Fm , и значит, обращает в 0 выражение F, так как 10 +20+…+m0 = 0.
Посмотрим, когда существуют такие 1, 2, …,m , что
1F1+2F2+…+mFm=F. Если такие 1,2, …,m существуют, то, сравнивая коэффициенты при х1 , х2 ,…, хп и правые части уравнений, получим, что 1, 2, …,m являются решениями следующей системы из п+1 уравнений:
Q
:
 .
.
Наоборот, если 1, 2 , … , m - решения этой системы, то 1F1+2F2+…+mFm = F. Таким образом, F = 1F1+…+mFm существует решение системы Q (по теореме Кронекера-Капелли) равны ранги матриц
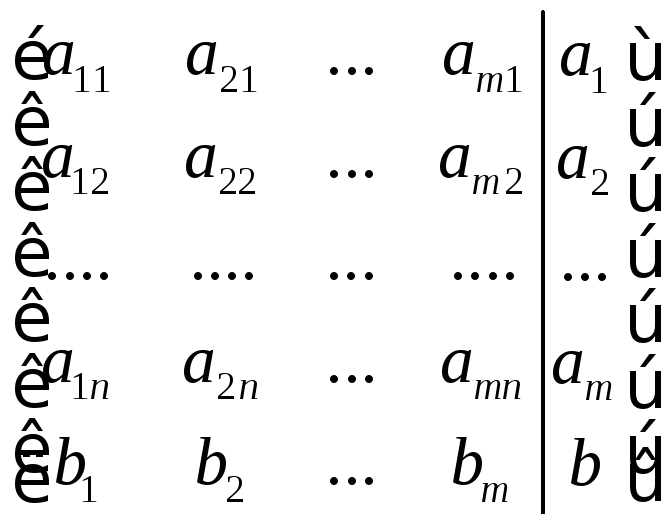 и
и
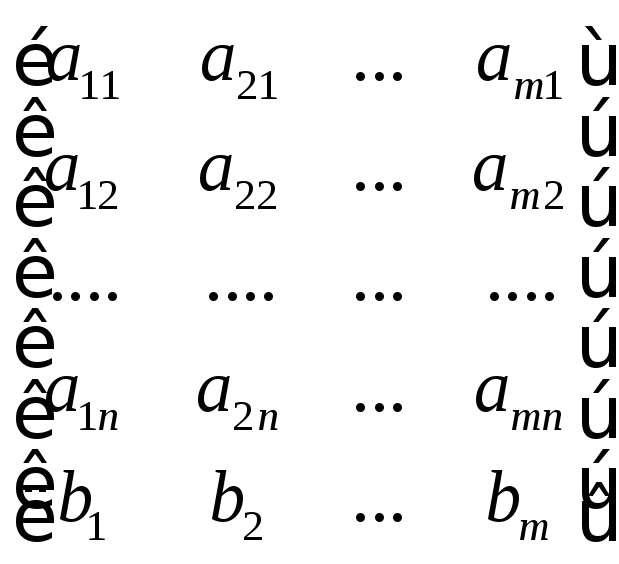 ,
или равны ранги транспонированных
матриц
,
или равны ранги транспонированных
матриц
 и
и
 .
.
Следовательно, если ранги этих матриц равны, то последнее уравнение в системе S можно отбросить и перейти от системы S к системе S.
Предположим теперь, что нам дана СЛУ (4.1), у которой ранг основной матрицы и ранг расширенной матрицы равны r (то есть система совместна). Для простоты будем считать, что отличный от нуля минор Mr порядка r находится в левом верхнем углу матрицы А. Тогда все уравнения, начиная с (r+1)-го и до т-го, являются линейными комбинациями первых r уравнений, и значит, их следствиями. То есть наша СЛУ равносильна системе из первых r уравнений, а уравнения с (r+1)-го и до т-го мы можем отбросить. Оставшиеся r уравнений мы запишем в виде
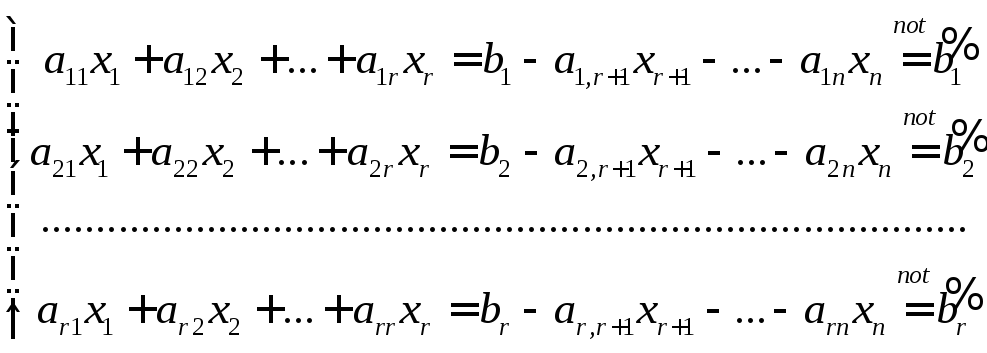 .
.
Так как определитель
основной матрицы этой системы равен Mr
0, то, решая
эту систему по Крамеру, получим хi=![]() /Mr
, i=
1,…,r,
где
/Mr
, i=
1,…,r,
где
![]() - определители,
зависящие от хj,
j=
r+1,…,n.
Раскрывая эти определители, пользуясь
линейностью по i-му
столбцу, получим:
- определители,
зависящие от хj,
j=
r+1,…,n.
Раскрывая эти определители, пользуясь
линейностью по i-му
столбцу, получим:
![]() =i
+ сi,r+1
хr+1+…+
сi,nхn,
i=1,…,r.
Подставляя эти формулы в хi=
=i
+ сi,r+1
хr+1+…+
сi,nхn,
i=1,…,r.
Подставляя эти формулы в хi=![]() /Mr
,
получим выражения главных неизвестных
через свободные.
/Mr
,
получим выражения главных неизвестных
через свободные.
Лекция 17.
8.3. Необходимые и достаточные условия равенства нулю определителя.
Теорема. Пусть А – (п,п)-матрица. Тогда равносильны следующие условия:
det A = 0,
rg A n,
однородная СЛУ с основной матрицей А имеет ненулевое решение,
столбцы матрицы А линейно зависимы,
строки матрицы А линейно зависимы.
Доказательство. Из определения ранга rk 1 2. Если det A 0, то, например, по правилу Крамера существует только нулевое решение однородной СЛУ с основной матрицей A. Наоборот, если det A = 0, rg A = r n, то у однородной СЛУ существуют n – r свободных неизвестных (см. 4.3), и, значит, существует ненулевое решение. Отсюда 1 3. Далее, существование ненулевого решения для однородной СЛУ равносильно линейной зависимости вектор-столбцов матрицы А (см. 7.5), то есть 3 4. Так как det A = det AТ, то 1 5.