

1
2. ЦИФРОВЫЕ ФИЛЬТРЫ НА ОСНОВЕ РАЗНОСТНЫХ УРАВНЕНИЙ И ДИСКРЕТНОЙ ВРЕМЕННОЙ СВЕРТКИ
2.1.ОПРЕДЕЛЕНИЕ И КЛАССИФИКАЦИЯ ДИСКРЕТНЫХ
СИСТЕМ
Дискретной по определению называется система, осуществляющая обработку дискретных сигналов. В данном случае понятия дискретная система и дискретный сигнал используются как синонимы и математические модели цифровой системы и цифрового сигнала с
неограниченной разрядностью и точностью обработки.
Дискретная система, как и аналоговая, полностью определяется математическим оператором, устанавливающим связь между ее выходным и входным сигналами или последовательностями: y(n) = Ф[x(n)], y(t) =
Фа[x(t)]. Оператор системы, реализуемый аппаратными или программными средствами, называют алгоритмом обработки системы.
По виду оператора дискретные системы классифицируются на линейные и нелинейные, инвариантные и неинвариантные ко времени. В данном
учебном пособии рассматриваются алгоритмы цифровой фильтрации, которым соответствуют линейные дискретные системы с постоянными параметрами (или коэффициентами). Они удовлетворяют принципам суперпозиции:
y(n) = Ф[a1x1(n) + a2x2(n)] = a1Ф[x1(n)] + a2Ф[x2(n)]
(отклик системы на сумму воздействий равен сумме откликов на каждое воздействие) и инвариантности к временному сдвигу, т. е. независимости отклика от момента приложения воздействия:
y(n − m) = Ф[x(n − m)],
где x(n − m), y(n − m) − последовательности, задержанные (или сдвинутые вправо) относительно x(n) и y(n) на m отсчетов или периодов дискретизации Тд.
2
2.2. МЕТОДЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ ЛИНЕЙНЫХ ДИСКРЕТНЫХ СИСТЕМ ВО ВРЕМЕННОЙ ОБЛАСТИ
И АЛГОРИТМЫ ЦИФРОВОЙ ФИЛЬТРАЦИИ НА ИХ ОСНОВЕ
Аналоговые линейные системы во временной области математически описываются дифференциальными уравнениями и интегралом свертки [1]:
∑M |
ak [ d k y( t ) / dt k ] = ∑ N bl [ d l x( t ) / dtl ], |
|
||
k = |
0 |
l= |
0 |
|
(2.1) |
|
|
|
|
|
∞ |
|
∞ |
|
y( t ) = ∫ h(τ )x( t − τ )dτ |
= |
∫ x(τ )h( t − τ )dτ |
(2.2) |
|
|
− ∞ |
|
− ∞ |
|
где h(t) – импульсная характеристика, являющаяся реакцией аналоговой системы на сигнал типа дельта-импульс: h( t ) = Фa [δ ( t )] .
В дискретных системах аналогом дифференциального уравнения (2.1)
является разностное уравнение:
|
∑M |
ak y( n − k ) =∑ N |
bl x( n − l ). |
||
|
k = |
0 |
l= 0 |
|
(2.3) |
|
|
|
|
|
|
В нем, как и в |
дифференциальном уравнении (2.1), M обозначает порядок |
||||
уравнения (M ≥ |
N), ak, bl – его весовые коэффициенты; x(n − |
l), y(n − k) − |
|||
входной и выходной сигналы системы, задержанные на |
l и k |
отсчетов или |
|||
периодов дискретизации.
Разностное уравнение может быть получено, в частности, дискретизацией по времени дифференциального уравнения с помощью замен вида:
dx → x(n) − x(n − 1) – первая разность и т. д. [50].
При a0 = 1 разностное уравнение (2.3) приводится к виду:
y( n ) = ∑N |
bl x( n − l ) −∑ M |
ak y( n − k ). |
l = 0 |
k= |
1 |
(2.4)
Устройство или программа, реализующие разностное уравнение (2.4) (т. е. выполняющие обработку сигнала в соответствии с разностным уравнением), называются дискретным или цифровым фильтром (ЦФ).
3
Сигнал на выходе цифрового фильтра равен сумме текущего отсчета входного сигнала x(n) и предыдущих (N и M) отсчетов входного и выходного
сигналов x(n − |
l), |
y(n |
− |
k), взвешенных (или взятых) |
с весовыми |
коэффициентами |
bl , |
− |
ak |
(рис. 2.1). Достигаемое в |
результате |
целенаправленное изменение формы, а следовательно, и спектра сигнала отвечает общей задаче частотной фильтрации сигналов.
При значениях коэффициентов ak ≠ 0 ЦФ называется рекурсивным (РФ). Рекурсия означает наличие в фильтре обратной связи, т. е. зависимости выходного сигнала y(n) от его предыдущих отсчетов y(n − k) (рис. 2.1).
x(n)
x(n-N)
bN
 …
…
n-N 

y(n)
y(n-M)
aM
 ….
….
n-M
x(n-2)
x(n-1)



 x(n)
x(n)
b2 b1 b0
n
n-2
 n-1
n-1
 n
n

 y(n-1)
y(n-1)  y(n-2)
y(n-2)

 y(n)
y(n)
a2 
 a1
a1
n
n-2  n-1
n-1 
 n
n
Рис. 2.1. Графическая иллюстрация обработки сигнала в соответствии с разностным уравнением
Разностному уравнению (2.4) с коэффициентами ak = 0 соответствует
нерекурсивный фильтр (НФ):
4
y( n ) = ∑N |
bl x( n − l ). |
l = 0 |
|
|
(2.5) |
Это фильтр без обратной связи, его выходной сигнал определяется взвешенной с весами bl суммой текущего и N предыдущих отсчетов входного сигнала (рис. 2.1, верхний график). Уравнение (2.5) называют также алгоритмом скользящего весового усреднения (с нормирующим или без нормирующего множителя перед знаком суммы).
Аналогом интеграла свертки (2.2) в дискретных системах является
дискретная временная свертка (ДВС). Ее выражение получают с помощью
замен: t → nТд, τ |
→ |
mТд, dτ → 1, ∫ → ∑ |
, т. е. дискретизацией (2.2): |
|
y( n ) = |
∑∞ |
h( m )x( n − m ) = ∑ ∞ |
x( m )h( n − m ). |
(2.6) |
|
m= −∞ |
m= |
−∞ |
|
Входящая в (2.6) дискретная функция h(m) (или h(n)) называется
импульсной характеристикой дискретной системы. Она определяется как отклик дискретной системы на сигнал типа единичный импульс u0(m) = 1, m = 0 и u0(m) = 0 при m > 0: h(m) = Ф[u0(m)]. Для физически реализуемой системы h(m) = 0 при m < 0 (отклик не может опережать воздействие); поэтому ДВС обычно представляют в виде:
y( n ) = ∑∞ |
h( m )x( n − m ). |
m= 0 |
|
|
(2.7) |
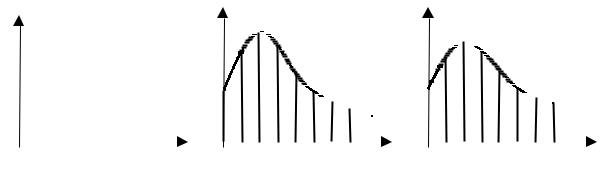
Возможны два вида импульсных характеристик ЦФ: бесконечной и конечной длительности (рис. 2.2).
5
|
|
|
u0(m) |
|
|
|
h(m) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(m) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
а) |
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 1 2 3 …… |
|
|
0 1 2 3 …… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 1 2 3 …… |
|
|
|
|
|
|
|
N-1 |
|||||||||||||||||||||||||
Рис. 2.2. Единичный импульс (а) и импульсные характеристики цифровых фильтров БИХ-типа (б) и КИХ-типа (в)
Бесконечную импульсную характеристику имеют рекурсивные фильтры, поэтому их часто называют также БИХ-фильтрами [15]. По импульсной характеристике можно судить об устойчивости РФ. Устойчивому РФ отвечает затухающая со временем импульсная
характеристика, что математически выражается как ∑∞ | h( m )|< ∞ .
m= 0
Нерекурсивные цифровые фильтры относятся к классу КИХ-фильтров, т. е. фильтров с конечной импульсной характеристикой. Выражение ДВС
(2.7) для НФ имеет конечные пределы суммирования, определяемые длиной импульсной характеристики N:
N − 1 |
N − 1 |
|
y( n ) = ∑ |
x( m )h( n − m ) =∑ |
h( m )x( n − m ). |
m= 0 |
|
m= 0 |
(2.8)
Это означает, что ДBC можно непосредственно использовать при реализации НФ в качестве алгоритма обработки, что невозможно для РФ вследствие бесконечности их импульсной характеристики и требуемого в связи с этим бесконечно большого объема вычислений.
Из сопоставления (2.5) и (2.8) следует, что значения импульсной характеристики в выражении ДВС (2.8) тождественны коэффициентам bl в разностном уравнении НФ (2.5): h(m) = bl|m=l и являются, таким образом, коэффициентами НФ. Поэтому, учитывая большое значение и

6
информативность свертки при описании дискретных сигналов и систем,
принято говорить, что НФ реализуют алгоритм цифровой фильтрации на основе ДBC (2.8), а РФ – алгоритм на основе разностного уравнения в его общей форме (2.4).
2.3. МЕТОДЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ СИГНАЛОВ ДИСКРЕТНЫХ СИСТЕМ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ
(В ЧАСТОТНОЙ ОБЛАСТИ)
Наиболее общим для аналоговых сигналов является операторный метод их описания на комплексной плоскости:
∞ |
− pt dt, |
|
X a ( p ) = ∫ x( t )e |
(2.9) |
|
0 |
|
|
где p = σ + jω − комплексный оператор Лапласа или комплексная частота [1]. Преобразованию Лапласа на мнимой оси jω (оси частот) соответствует
преобразование Фурье аналогового сигнала, определяющее его спектр:
∞
X a ( jω ) = X a ( p ) p= jω = ∫ x( t )e− jω t dt.
0
Для дискретных сигналов преобразование Лапласа получается из (2.9) с
помощью замен: t→ |
nTд , ∫ → ∑ , dt→ |
1, т. е. дискретизацией (2.9) по |
|
времени: |
|
|
|
X ( р ) = |
∑∞ |
x( n )e− pnTд . |
(2.9′) |
|
n= 0 |
|
|
Однако в отличие от аналоговых сигналов и систем преобразование (2.9′) не приводит к рациональным функциям при математическом описании дискретных сигналов и систем на комплексной Р-плоскости. Этому важнейшему условию отвечает Z-преобразование дискретных сигналов, определяемое соотношением
7
Z{ x( n )} = X ( z ) = ∑∞ |
x( n )z − n . |
n= 0 |
|
(2.10) |
|
Комплексная переменная z в (2.10) связана с переменной p (оператором Лапласа):
z = e pTд = a + jb = eσ Tд e jω Tд .
(2.11)
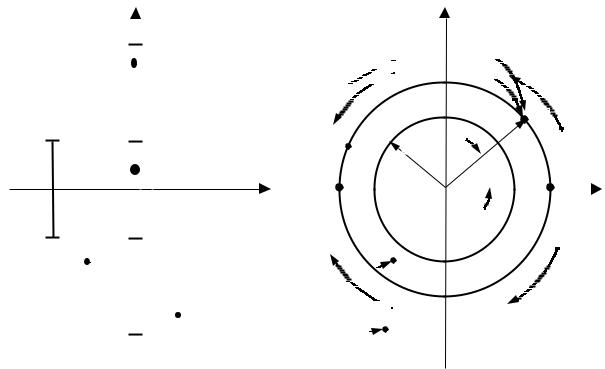
Эта связь иллюстрируется отображениями точек из комплексной P-плоскости на комплексную Z-плоскость (рис. 2.3). Особенность этих отображений заключается в их цикличности по переменной ω , обусловленой периодичностью комплексной экспоненты ejω Tд с периодом ω д:
j[ ω + kω д ]Tд , k = 0, ± 1, ± 2 и т. д.
8
Р |
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z - плоскость |
|
|
|
|
|
|
jb |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ПЛОСКОСТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3ω |
|
д/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω д/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e-σ 1Tд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω 1 |
|||||||||||||||||||||
-σ 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
|
ω д/2 |
|
|
|
|
|
|
|
|
|
ω 1Tд |
|
ω = а |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-ω |
|
д/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-ω д/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-ω |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-3ω д/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.3. Отображения точек с комплексной Р-плоскости на Z-плоскость
Так, точки мнимой оси jω Р-плоскости (σ = 0) циклически переносятся на окружность единичного радиуса Z-плоскости; каждой полосе частот шириной ω д при этом соответствует один обход этой окружности. Однозначное отображение точек имеет место в основной полосе частот
± ω д/2. Левая P-полуплоскость (σ < 0) свертывается внутрь круга единичного радиуса Z-плоскости, а правая Р-полуплоскость (σ > 0)отображается за его пределы.
Z-преобразование, вычисленное на единичной окружности, приводит к преобразованию Фурье дискретного сигнала (1.2), определяющему его
спектр: |
|
|
|
|
|
X ( z )| jω T |
= X ( jω ) = |
∑∞ |
x( n )e− jω nTд . |
(2.12) |
|
z= e |
д |
n= 0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
9
Следует отметить, что Z-преобразование, как и преобразование Лапласа, может быть односторонним – для последовательностей x(n) = 0 при n < 0, так
и двусторонним, если x(n) ≠ 0 |
при n |
< 0; в этом случае пределы |
суммирования по n берутся от − |
до + |
[17]. |
К наиболее важным относятся следующие свойства Z-преобразования:
линейности:
Z{ a1 x1( n ) + a2 x2 ( n )} = a1 X1( z ) + a2 X 2 ( z )
(2.13)
(Z-преобразование суммы равно сумме Z-преобразований);
задержки: |
m )} = ∑∞ |
|
|
|
|
Z{ x( n − |
x( n − |
m )z− ( n− m ) z− m = z− |
m X ( z ) |
(2.14) |
|
(Z-преобразование |
n= 0 |
|
на m отсчетов |
|
|
задержанного |
дискретного |
сигнала |
|||
x(n – m) равно произведению Z-образа X(z) незадержанного сигнала х(n) на множитель задержки z-m. Этим объясняется использование символа z-m для
обозначения элемента задержки на структурных схемах систем ЦОС: |
|
|||||||||
|
x(n) |
|
|
x(n-m) |
|
В частности, элемент задержки на один отсчет, |
||||
|
Z-m |
|
|
|||||||
|
|
|
|
|
|
|
т. е. период дискретизации, обозначается как z-1: |
|||
|
|
|
|
-m |
|
|
||||
|
X(Z) |
Z |
X(Z) |
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
Z{ x( n − 1)} = z − 1 X ( z )); |
|
|||
cвертки: |
y( n ) = x1( n )* x2 ( n ) = ∑∞ |
|
|
|||||||
|
|
|
|
x1( m )x2 ( n − m ); |
|
|||||
|
|
|
|
|
|
|
|
m= 0 |
|
|
|
Y( z ) = |
∑∞ ∑ |
∞ |
x1( m )x2 ( n − m )z − ( n− m ) z− m = X1( z )X 2 ( z ) |
(2.15) |
|||||
|
|
|
|
n= 0m= 0 |
|
|
|
|||
(Z-преобразование свертки двух последовательностей равно произведению Z- преобразований этих последовательностей);
произведения: |
|
|
1 |
|
X1( v )X 2 ( v ) dv |
y( n ) |
= x1( n )x2 ( n ); Y( z ) |
= |
∫ |
||
(2.16) |
|
|
2π |
j c |
v |
|
|
|
|
|
|
(Z-преобразование произведения двух последовательностей равно |
|||||
комплексной свертке |
Z-образов этих |
последовательностей, где v – |
|||
10
переменная интегрирования, С – контур интегрирования, охватывающий все особые точки подынтегральной функции).
На основе свойства (2.16) Z-преобразования произведения дискретных последовательностей доказывается важное для практики равенство Парсеваля, имеющее тот же смысл, что и для аналоговых сигналов:
∑∞ |
| x( nTД )|2 = |
|
|
∫ X ( z )X ( z− 1 )z− 1dz = |
ω |
д / 2 |
1 |
j |
TД |
∫ | X ( jω )|2 dω . |
|||
n= 0 |
|
2π |
C |
π |
0 |
Оно означает тождественность временной и частотной оценок энергии сигнала.
Аналогичными свойствами обладает и преобразование Фурье дискретного сигнала.
Обратные Z и Фурье преобразования определяются выражениями:
|
Tд |
|
ω |
|
д / 2 |
)e jω |
nTд dω |
|
1 |
π |
|
|
|
x( n ) = |
|
|
|
∫ |
X ( jω |
= |
∫ X ( jλ )e jλ n dλ , |
(2.17) |
|||||
2π |
|
|
|
2π |
|||||||||
|
|
− |
ω |
д |
/ 2 |
|
|
|
− π |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x( n ) = |
1 |
|
∫ X ( z )z n− 1dz = |
∑ resi [X ( z )zn− 1 ]z= z . |
(2.18) |
||||||||
|
2π |
j C |
|
|
|
i |
|
|
|
pi |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь обозначены: |
λ = ωΤ |
д = |
2π f/fд |
– |
относительная частота, называемая |
||||||||
также цифровой частотой; res – вычеты подынтегральной функции F(z) = X(z)zn-1 в особых точках, охватываемых контуром С, по которому ведется интегрирование. Для дробно-рациональных функций X(z) = P(z)/Q(z) такими особыми точками являются корни полинома Q(z), называемые полюсами zpi функции X(z). Полюсы могут быть вещественными, комплексносопряженными, простыми и кратными. Вычеты в полюсах находятся с помощью выражений [17]:
для простого полюса
resi [F( z )]z= z |
pi |
= limz→ z |
[( z − z pi )F( z )], |
(2.19) |
|
|
pi |
|
для полюса кратностью r
res |
[F( z )] |
= |
1 |
lim |
|
d r− 1 |
[( z − |
z |
|
)r F( z )] . |
(2.20) |
( r − 1)! |
z→ z pi dz r− 1 |
|
|||||||||
i |
|
z= z pi |
|
|
|
pi |
|
|
|||