

|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
cosω 0t |
|
Ac(t) |
Ac(nTД) |
|
|
|
|
|
|
|
|
|
|
|
A(nTД ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a(t) |
|
X |
|
ФНЧ |
|
|
|
АЦП |
|
|
|
|
|
СФс |
|
|
|
|
( )² |
|
|
∑ |
|
|
|
√ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ(nTД ) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Arctg (s/c) |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
ФНЧ |
|
|
|
АЦП |
|
|
|
|
|
СФs |
|
|
|
( )² |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
− sinω 0t |
|
As(t) |
As(nTД) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Рис. 6.11. Структурная схема оптимальной обработки узкополосного радиосигнала
В качестве примера рассмотрим цифровую согласованную фильтрацию
широко |
используемого |
в |
радиотехнике |
ЛЧМ-радиоимпульса |
||||||
a(t) = a cos(ω |
o |
t + β |
t2/2), где β |
= 2∆ω |
/T |
c |
− |
скорость |
модуляции, 2∆ω − де- |
|
|
|
|
|
|
|
|
|
|
||
виация частоты, Tc − длительность радиоимпульса. Сигнал характеризуется также индексом модуляции m = ∆ω Tc /π . Огибающая сигнала в цифровой
форме определяется как A k( nTД ) = a e jβ ( nTД )2 / 2 , а импульсная характеристика согласованного с ней НФ, соответственно, как
h k ( n ) = e jβ ( N − 1− n )2 TД 2 / 2 = e jπ m( N − 1− n )2 / N 2 ,
где N = Tc /TД – число обрабатываемых отсчетов огибающей сигнала. Согласованная цифровая фильтрация приводит к сжатию ЛЧМ-импульса в m раз при одновременном увеличении его пикового значения в √ m раз. Увеличивая длительность и уменьшая амплитуду сигнала, можно получить то же соотношение сигнал/шум на выходе СФ и улучшить таким образом энергетику канала [1, 2].
Нерекурсивный фильтр, согласованный с комплексной огибающей ЛЧМсигнала, может быть реализован различными способами, рассмотренными в данном учебном пособии и в [15, 57, 60].
6.7. ПРОСТЫЕ АЛГОРИТМЫ ЦИФРОВОГО ДИФФЕРЕНЦИРОВАНИЯ СИГНАЛОВ
С помощью нерекурсивных фильтров реализуются простые алгоритмы приближенного цифрового дифференцирования сигналов, используемые, например, в радиолокации (селекция движущихся целей) [27], электрокардиографии (выделение R-зубцов) [53,61] и других областях.
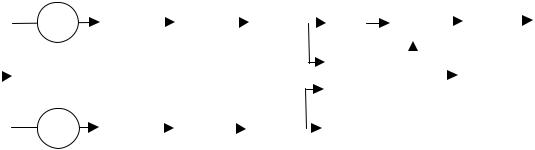
Двухточечный алгоритм дифференцирования описывается уравнением вида y(n) = (1/TД)[x(n) – x(n – 1)] и реализуется в соответствии со структурной схемой НФ рис. 6.12, а.
|
|
|
|
|
|
21 |
|
|
x(n) |
|
|
|
|H(λ |
)| |
|||
|
||||||||
|
|
|
z -1 |
X -1 |
|
π |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||
|
|
|
|
|
π /2 |
|||
|
|
|
|
|
1/TД |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
∑ |
X |
y(n) |
|
|
λ |
|
|
0 |
π /2 |
π |
|
|
|
|
|||
а) |
|
|
б) |
|
|
Рис. 6.12. Структурная схема (а) и АЧХ (б) двухточечного дифференцирущего нерекурсивного фильтра
Ему отвечают передаточная функция H(z)= (1/TД)(1− |
z− 1) с нулем в точке |
z0 = 1, АЧХ |H(jλ )| = (2/TД)sinλ /2 (рис. 6.12, б) и ФЧХ ϕ |
(λ ) = (π /2) – (λ /2). |
АЧХ фильтра практически линейна, т. е. близка к АЧХ идеального дифференциатора до значений λ ≈ π /4 или fД /8.
Данный алгоритм наряду с сигналом усиливает также высокочастотные шумы и помехи, которые могут присутствовать на входе фильтра.
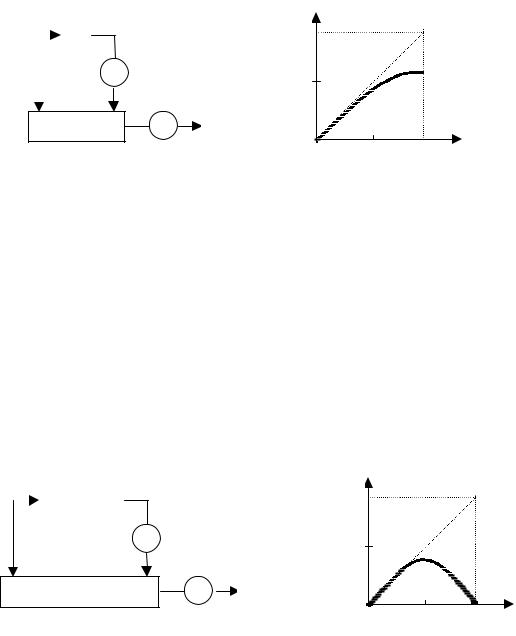
Трехточечный алгоритм дифференцирования описывается уравнением вида y(n) = (1/2TД)[x(n) – x(n – 2)] и реализуется в соответствии со структур-
ной схемой НФ рис. 6.13, а. |
|
|
||||||
|
x(n) |
|
|
|
|
|H(λ |
)| |
|
|
|
|
|
|
||||
|
|
|
z -1 |
|
z -1 |
|
π |
|
|
|
|
|
|
|
|||
X |
-1 |
1/2TД |
π /2 |
|
|
|
|
|
|
|
|
|
|
∑ |
|
X |
y(n) |
|
|
λ |
|
|
|
0 |
π /2 |
π |
|
|
|
|
|
|||
а) |
|
|
|
б) |
|
|
Рис. 6.13. Структурная схема (а) и АЧХ (б) трехточечного дифференцирущего нерекурсивного фильтра
Ему отвечают передаточная функция H(z)= (1/2TД)(1− z− 2) с нулями в точках
z0 1,2 = ± 1, АЧХ |H(jλ )| = (1/TД)sinλ (рис. 6.13, б) и ФЧХ ϕ (λ ) = (π /2) – λ .
АЧХ фильтра практически линейна, т. е. близка к АЧХ идеального дифференциатора до значений λ ≈ π /6 или fД /12.
В отличие от предыдущего, данный алгоритм подавляет возможные высокочастотные шумы и помехи на входе фильтра.
Алгоритм дифференцирования на основе полиномиальной аппроксимации по конечному набору данных, как показано в п. 6.5.4, позволяет получить сглаженные оценки первой и высших производных сигнала.
22
Например, в случае параболической 5-точечной аппроксимации дифференцирование осуществляется в соответствии с разностным уравнением:
y1(n) = (1/10){2[x(n + 2) – x(n – 2)] + [x(n + 1)] – x(n – 1)]},
которому отвечают передаточная функция, АЧХ и ФЧХ НФ:
H(z) = (1/10)[2+ z− 1 − z− 3 − 2 z− 4], |H(jλ )| = (2/10)(sinλ +2sin2λ ), ϕ (λ )=(π /2) –2 λ .
Предлагается самостоятельно проанализировать АЧХ данного фильтра.
С увеличением порядка фильтра (при N = 7, 9, 11) улучшаются точность аппроксимации производной и подавление высокочастотных шумов и помех.
6. 8.ПРОСТЫЕ АЛГОРИТМЫ ЦИФРОВОГО ИНТЕГРИРОВАНИЯ СИГНАЛОВ
С помощью цифровых фильтров реализуются простые алгоритмы приближенного цифрового интегрирования сигналов, такие как алгоритм прямоугольников, трапеций и Симпсона.
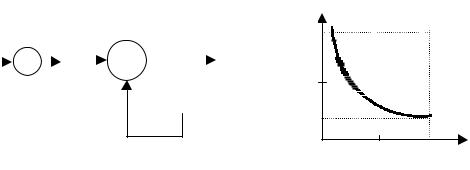
Алгоритм прямоугольников определяется разностным уравнением y( n=) TД x( n− 1)+ y( n − 1),
реализуемым рекурсивным ЦФ первого порядка (рис. 6.14, а).
|
TД |
|
|
|
|
|
|
|
|
|H(λπ )| |
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
x(n) |
|
|
|
|
|
∑ |
|
|
y(n) |
|
||||
X |
|
|
z -1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
|
π /2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z -1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||||||
0 |
π /2 |
π |
λ |
|
|||
а) |
б) |
|
|
Рис. 6.14. Структурная схема (а) и АЧХ (б) рекурсивного фильтра, интегрирующего по алгоритму прямоугольников
Он описывается передаточной функцией, АЧХ и ФЧХ вида:
H(z)= TД z− 1 /(1- z− 1), |H(jλ )| = TД /2sinλ /2 (рис. 6.14, б), ϕ (λ ) = – (π /2) – (λ /2).
Фильтр имеет один нуль zo = 0 в начале координат и полюс zp = 1на единичной окружности. Фильтр потенциально неустойчив, что проявляется в нарастании со временем погрешности интегрирования.
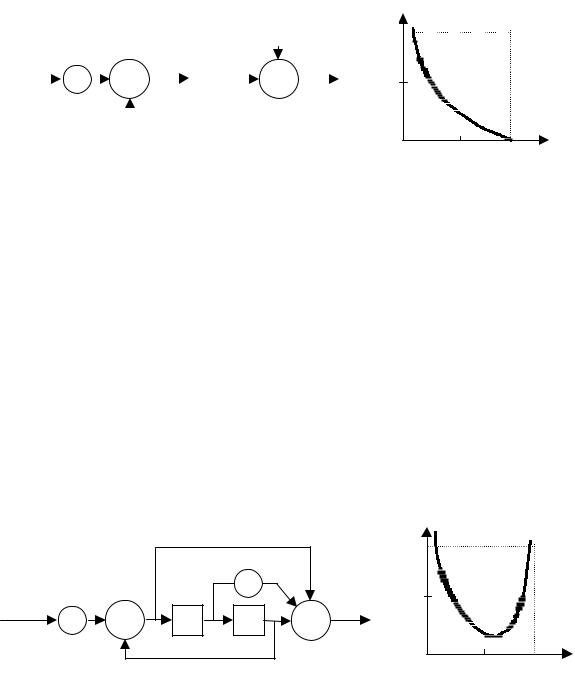
Более точное интегрирование обеспечивает алгоритм трапеций, определямый разностным уравнением
y=( n ) TД x−( n +1) y(−n 1+) (TД / 2 )[x( n )− x( n − 1)] ,
реализуемым рекурсивным ЦФ первого порядка (рис. 6.15, а).
|
|
|
|
|
|
|
|
|
|
|
|
23 |
|
|
|
|
|
|
TД /2 |
|
|
|
|
|
|
|
|
|
|
|
|
|H(λπ )| |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
y(n) |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
x(n) |
∑ |
|
|
|
|
|
|
|
∑ |
|
|
||||||
|
X |
|
|
|
|
|
z -1 |
|
|
|
|
|
|
π /2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
π /2 |
π |
λ |
|
|||
а) |
б) |
|
|
Рис. 6.15. Структурная схема (а) и АЧХ (б) рекурсивного фильтра, интегрирующего по правилу трапеций
Он описывается передаточной функцией, АЧХ и ФЧХ вида:
H(z)= (TД /2)(1+ z− 1)/(1- z− 1), |H(jλ )| = (TД /2)ctgλ /2 (рис. 6.15, б), ϕ (λ ) = – (π /2).
Фильтр имеет один нуль в точке zo= − 1 и полюс zp = 1 на единичной окружности. АЧХ фильтра достаточно близка к АЧХ идеального интегратора (1/λ ) на частотах менее λ ≈ π /2 или fД /4. Вследствие потенциальной неустойчивости фильтра также со временем происходит нарастание погрешности интегрирования.
Цифровое интегрирование по правилу Симпсона выполняется в соответствии с разностным уравнением
|
y( n ) = y( n − 2 ) + (TД / 3 )[x( n ) + 4x( n − 1) + x( n − 2 )], |
|
|
|||||
реализуемым РФ второго порядка (рис. 6. 16, а). |
|
|
|
|
||||
|
|
|
4 |
|
|H(λπ )| |
|
|
|
|
|
|
|
|
|
|
|
|
TД /3 |
|
|
X |
y(n) |
π /2 |
|
|
|
x(n) |
∑ |
z -1 |
z -1 |
|
|
|
||
X |
∑ |
|
|
|
|
|||
|
|
|
|
|
0 |
π /2 |
π |
λ |
|
|
|
|
|
|
|||
|
|
а) |
|
|
|
б) |
|
|
Рис. 6.16. Структурная схема (а) и АЧХ (б) рекурсивного фильтра, интегрирующего по правилу Симпсона
Он описывается передаточной функцией, АЧХ и ФЧХ вида:
H(z)= (TД /3)(1+4z− 1+ z− 2)/(1- z− 2), |H(jλ )| = (TД /3)(2+cosλ )/sinλ |
(рис. 6.16, б), |
ϕ (λ ) = – (π /2). Фильтр имеет пару нулей zo1 = − 0,27, zo2 = − |
3,73 и полюсов |
zp1,2 = ± 1 на единичной окружности. Следствием потенциальной неустойчивости данного фильтра, как и выше рассмотренных, является ограниченное время непрерывного интегрирования и необходимость периодического при-