

Конспект лекций Высшая математика (Басканова)
.pdf89
ГЛАВА 3. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
При решении геометрических задач приходится пользоваться, с одной стороны, построениями, с другой – вычислениями. Если в элементарной геометрии невозможно обойтись без построений, то аналитическая геометрия изучает геометрические объекты с помощью алгебраических методов. Основным методом аналитической геометрии является метод координат. Вза- имно-однозначное соответствие между множеством точек плоскости или пространства и множеством действительных чисел лежит в основе метода координат и позволяет геометрические задачи сводить к алгебраическим. Основные понятия аналитической геометрии находят приложение в целом ряде общетехнических и специальных дисциплин. .
ЛЕКЦИЯ 1.8. ПЛОСКОСТЬ В ПРОСТРАНСТВЕ, ЕЕ УРАВНЕНИЯ. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПЛОСКОСТЕЙ. РАССТОЯНИЕ ОТ ТОЧКИ ДО ПЛОСКОСТИ
1.8.1 Предмет аналитической геометрии
В предыдущей главе, изучая векторы, мы каждому вектору ставили в соответствие его координаты в декартовом базисе. Решая задачи с векторами, мы геометрическую задачу сводили к аналитической задаче, выясняя соотношения между координатами. Такой метод был введен Декартом и назывался методом координат. В аналитической геометрии мы будем использовать тот же подход, то есть линии и поверхности будем описывать их уравнениями, а далее изучать свойства геометрических объектов, анализируя данные уравнения.
Уравнения линий в R2 и поверхностей в R3 можно записывать как в явном, так и в неявном виде:
1. линии в R2 :
а) y = f (x) – явный вид задания;
б) F(x, y) = 0 – неявный вид задания;
2. поверхности в R3 :
а) z = f (x, y) – явный вид задания;
б) F(x, y, z) = 0 – неявный вид задания.
В данной главе мы часто будем иметь дело с геометрическим образом математического объекта, поэтому введем данное понятие. Под геометрическим образом будем понимать линию или поверхность, заданную как геометрическое место точек, обладающих общим свойством.
Пример. Составить уравнение окружности в декартовой системе координат.

90
Решение
Из школьного курса математики известно, что точки, лежащие на окружности равноудалены от центра окружности, поэтому воспользуемся данным свойством, чтобы составить ее уравнение (рис. 1.8.1)
y
y
y0 в
0 x0 x x
Рис. 1.8.1
Из рисунка определяем следующие координаты точек B(x0; y0) и M(x;y). Найдем координаты вектора ВМ , зная координаты его конца и начала:
ВМ (х х0; y y0 ) .
Для того, чтобы найти расстояние (радиус окружности) R от центра окружности B до любой текущей точки M окружности вычислим длину вектора
ВМ :
|
|
|
|
(х х )2 |
( y y )2 . |
|
|
R |
|
|
|
|
(1.8.1) |
||
ВМ |
|||||||
|
|
|
|
|
0 |
0 |
|
Чтобы получить уравнение окружности возведем обе части равенства (1.8.1) в квадрат и в итоге запишем каноническое уравнение окружности со смещенным центром:
(x x0 )2 ( y y0 )2 R2 .
Подводя итог данному параграфу, хотелось бы отметить, что в аналитической геометрии приходится решать два основных типа задач:
1.дана линия или поверхность как геометрическое место точек, требуется составить уравнение линии или поверхности;
2.дано уравнение линии или поверхности, требуется построить линию или поверхность.
1.8.2. Плоскость в пространстве, её уравнения. Взаимное расположение плоскостей. Расстояние от точки до плоскости
Плоскость и ее свойства изучались в курсе элементарной математики. Наша задача научиться описывать плоскость аналитически, но для этого надо знать уравнение, описывающее плоскость. Поэтому сформулируем основную теорему для плоскости.
Теорема. В декартовой системе координат любая плоскость задается линейным уравнением
91 |
|
Ax + By + Cz + D = 0 |
(1.8.2) |
И, наоборот, любое линейное уравнение в декартовой системе коорди- |
|
нат определяет плоскость.
Уравнение (1.8. 2) называется общим уравнением плоскости
Уравнение (1.8.2) можно записать в следующем виде:
A(x–x0) + B(y–y0) + C(z–z0) = 0 . |
(1.8.3) |
||
Уравнение (1.8.3) называется уравнением плоскости P проходящей |
|||
через точку M0(x0; y0; z0) перпендикулярно вектору |
n |
=(A; |
B; C), который |
называется нормальным вектором плоскости. |
|
||
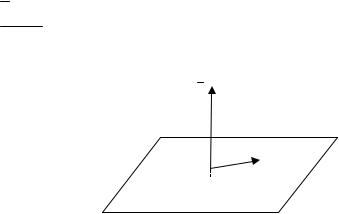
Таким образом, чтобы написать уравнение плоскости в виде (1.8.2) или (1.8.3) нужно знать координаты какой-либо точки на этой плоскости и координаты какого-либо вектора, перпендикулярного к этой плоскости.
Выведем уравнения плоскости (1.8.2) и (1.8.3).
Для этого введем в рассмотрение два вектора – это нормальный вектор плоскости n =(A; B; C) и вектор перпендикулярный данному, лежащий на плоскости М0М , причем координаты точек лежащих на плоскости P сле-
дующие: M(x; y; z), M0(x0; y0; z0) (рис. 1.8.2).
n
|
|
|
|
|
|
|
Р |
|
|
|
|
M |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
M0 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Рис. 1.8.2 |
|
|
|
|
|
||||||
|
|
Найдем координаты вектора |
|
|
|
|
|
(x x0; y y0; z z0 ) . |
|
|||||||||
М0М |
|
|||||||||||||||||
|
|
Из условия задачи |
следует, что |
векторы |
|
|
= (A; |
B; C) и |
||||||||||
n |
||||||||||||||||||
|
|
(x x0; y y0; z z0 ) |
ортогональны между собой, |
а следовательно их |
||||||||||||||
|
М0М |
|||||||||||||||||
скалярное произведение равно нулю: |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
А (х х0 ) В ( у у0 ) С(z z0 ) 0, |
|
|||||||||||
|
|
|
n |
ММ0 |
|
|||||||||||||
|
|
То есть получили уравнение (1.8.3). |
|
|
|
|
|
|||||||||||
|
|
Раскрывая скобки в уравнении (1.8.3) и приводя подобные, имеем: |
||||||||||||||||
|
|
|
|
|
Ах Вy Сz Ах0 Вy0 Cz0 0 . |
|
||||||||||||
|
|
Если обозначить Ах0 Вy0 Cz0 =D, |
то получим |
общее |
уравнение |
|||||||||||||
плоскости (1.8.2): |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Ax + By + Cz + D = 0.
Определение. Общее уравнение плоскости называется полным, если все его коэффициенты не равны нулю, в противном случае оно называется
неполным.
Рассмотрим различные виды неполных уравнений:

92
1.D = 0 O P;
2.A = 0 P || Ox; B = 0 P || Oy; C = 0 P || Oz;
3.A = B = 0 P Oz; A = C = 0 P Oy; B = C = 0 P Ox;
4.D = A = 0 Ox P; D = B = 0 Oy P; D = C = 0 Oz P;
5.D = A = B P xOy; D = A = C P xOz; D = B = C P yOz.
Замечание. Одна и та же плоскость может быть описана различными
уравнениями первого порядка в пространстве R3 . Выбор того или иного уравнения определяется информацией, которая известна о плоскости. Например, могут быть известны координаты трех точек плоскости или отрезки, которые отсекает плоскость от осей координат и т. п.
Запишем еще одно уравнение плоскости – уравнение плоскости, проходящей через три точки A, B, C. Пусть точка M(x; y; z) принадлежит искомой
плоскости. Тогда векторы АМ , АВ, АС будут лежать в искомой плоскости, т.е. будут компланарными. Следовательно, должно выполняться условие:
АМ АВ АС 0 . Если A(x1; y1; z1), B(x2; y2; z2), C(x3; y3; z3), то получается формула для записи уравнения плоскости, проходящей через три заданные
точки (рис. 1.8.3):
x x1 x2 x1 x3 x1
y y1 y2 y1 y3 y1
z z1
z2 z1 0 . (1.8.4) z3 z1
A
A C
M B
Рис. 1.8.3
Для построения более удобно использовать уравнение плоскости в
отрезках на осях координат:
х |
|
у |
|
z |
1, |
(1.8.5) |
|
а |
b |
c |
|||||
|
|
|
|
где a, b, c – отрезки, отсекаемые соответственно на осях Ox, Oy, Oz (рис.1.8.4)

93
z
c |
|
|
b |
0 |
y |
a |
|
x
Рис. 1.8.4
Примеры
1. Найти уравнение плоскости, проходящей через три заданные точки:
A(1;2;0), B(2; 1; 1), C(3; 0; 1).
Решение
Подставим в уравнение (1.8.4) плоскости проходящей через три точки исходные данные. В результате вычисления данного определителя третьего порядка получим
x 1 |
y 2 |
z 0 |
|
|
|
x 1 |
y 2 z |
|
|
|
|
|
|
||||||||
2 1 |
1 2 |
1 0 |
|
|
|
1 |
1 |
1 |
|
|
3 1 |
0 2 |
1 0 |
|
|
|
2 |
2 1 |
|
|
|
(x 1) ( 1) ( y 2) 2 2 z 2z 2 (x 1) 1 ( y 2) 0
x + y – 3 = 0.
2.Составить уравнение плоскости, проходящей через точку M1 перпендику-
лярно вектору М1М2 , где M1(3; 4; 2) и M2(-1; 3; 5).
Решение
При решении данной задачи удобнее воспользоваться уравнением плоскости (1.8.3), проходящей через точку M1(3; 4; 2) перпендикулярно век-
тору М1М2 , который мы будем считать нормальным вектором плоскости. Найдем координаты нормального вектора
n = М1М2 = (-1 - 3; 3 - 4; 5 - 2) = (-4; -1; 3).
Подставляя координаты точки M1(3; 4; 2) и координаты нормального
вектора n = (-4; -1; 3) в уравнение (1.8.3), получим
-4(x – 3) -1(y – 4) + 3(z – 2) = 0
-4x + 12 – y + 4 + 3z – 6 = 0
-4x – y + 3z + 10 =0.

94
3. Дано общее уравнение плоскости 3x + 4y + 5z – 15 = 0. Привести уравнение данной плоскости к уравнению в отрезках и построить эту плоскость.
Решение
Сведем общее уравнение данной плоскости к уравнению в отрезках (1.8.5), производя элементарные арифметические преобразования:
3x + 4y + 5z – 15 = 0; |
3x + 4y + 5z = 15; |
||||||||||||||
|
3 |
x |
|
4 |
y |
|
5 |
z 1; |
|
x |
|
y |
|
z |
1. |
15 |
15 |
15 |
5 |
15 |
|
||||||||||
|
|
|
|
3 |
|
||||||||||
4
Анализируя полученное уравнение в отрезках, можно заключить, что a=5, b = 154 , c = 3. Используя это уравнение легко построить плоскость по
трем точкам M1(5; 0; 0), M2(0; 154 ; 0), M3(0; 0; 3) (рис. 1.8.5).
z
3
0 |
15 |
y |
5 |
4 |
|
|
|
x
Рис. 1.8.5
Условия параллельности и перпендикулярности плоскостей, нахождения угла между ними сводится к аналогичным задачам для нормальных векторов этих плоскостей. Удобнее проиллюстрировать взаимное расположение плоскостей в пространстве в форме табл. 1.8.1 (в таблице две плоскости заданы своими общими уравнениями: P1: A1x + B1y + C1z + D1 = 0; P2;
A2x + B2y + C2z + D2 = 0).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
95 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.8.1 |
||||||
|
Взаимное расположение плоскостей в пространстве |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Случаи взаимного |
|
Геометрическая |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
расположения |
|
|
|
|
|
Формулировка условий |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Интерпретация |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
плоскостей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Плоскость P1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как n1 |
n2 , то их скалярное |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
перпендикулярна |
|
Р1 |
|
|
|
|
|
|
|
|
|
|
|
произведение равно нулю |
|
|||||||||||||||||||||||||||||||||||||||||
1. |
плоскости P2 |
|
|
|
|
|
|
|
Р2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
(P1 P2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А1 А2 В1 В2 С1 С2 0 |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
n2 |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
|
|
|
|
|
Так как |
|
|
|| |
|
|
|
|
|
, то их координаты |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
n2 |
|
||||||||||||||||||||||||||||||
|
|
|
|
Р1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
Плоскость P1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пропорциональны |
|
|
|
|
||||||||||||||||||||||||||||||||
|
параллельна |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2. |
плоскости P2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
В |
|
С |
|
D |
|
|||||||||||||
|
(P1||P2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
1 |
|
|
1 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
Р2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А2 |
|
|
|
|
|
|
|
В2 |
|
С2 |
|
D2 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
n1 |
Угол между плоскостями равен углу |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
между их нормальными векторами |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|||||||
|
Плоскости P1 и P2 |
|
|
|
|
Р1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
n2 |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
пересекаются под |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 n2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
3. |
произвольным |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
Р2 |
|
|
|
|
|
|
|
|
|
|
|
соsα |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
углом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А1 А2 В1 В2 С1 С2 |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А2 В2 |
С2 |
|
А2 |
В2 |
С2 |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
1 |
2 |
2 |
2 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
записать |
|
в |
|
|
|
|
|
нормальном виде |
|
|||||||||||||||||||||||||||
|
Уравнение |
плоскости можно |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
xcosα y cosβ z cos γ p 0 , где cosα,cosβ,cos γ – направляющие косину-
сы нормального вектора плоскости, p>0 – расстояние от начала координат до плоскости.
Для того. чтобы перейти от общего уравнения плоскости к нормальному, его нужно умножить на величину
|
1 |
, |
А2 В2 С2 |
называемую нормирующим множителем. Знак «+» или «–» выбирается таким образом, чтобы последнее слагаемое было отрицательным.

96
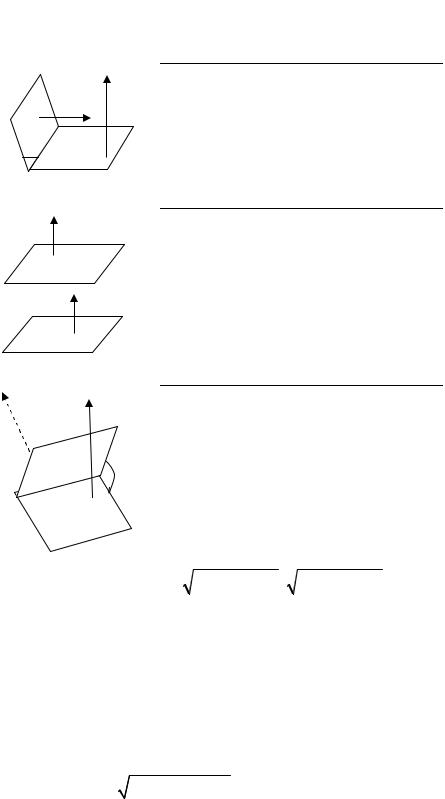
Аналогично получается формула для нахождения расстояния от точки M0(x0; y0; z0) до плоскости P: Ax + By + Cz + D = 0 (рис. 1.8.6).
M0 d
М 
Рис. 1.8.6
d= (M0 , P) x0 cosα y0 cosβ z0 cos γ p
или
d Ах0 Ву0 Сz0 D .
А2 В2 С2

97
ЛЕКЦИЯ 1.9. ПРЯМАЯ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ. ОСНОВНЫЕ ЗАДАЧИ НА ПРЯМУЮ И ПЛОСКОСТЬ В ПРОСТРАНСТВЕ
1.9.1. Прямая на плоскости
Пусть на плоскости фиксирована некоторая декартова система координат и задана прямая линия L. Ясно, что координаты точек, лежащих на прямой, не могут быть произвольными, а должны удовлетворять определенным соотношениям. Выведем эти соотношения, т.е. найдем уравнение прямой.
Рассмотрим какой-либо ненулевой вектор n =(A; B) L (рис. 1.9.1).
y
 M n M0
M n M0
L |
0 |
x |
Рис. 1.9.1
Очевидно, что все другие векторы, перпендикулярные данной прямой,
будут коллинеарны вектору n . Зафиксируем на прямой какую-либо точку.M0(x0;y0). Тогда все другие точки прямой, причем только они, обладают
тем свойством, что векторы |
М0М |
и |
n |
|
перпендикулярны, т.е. |
|
|||||
|
|
|
|
|
|
|
0. |
|
|||
|
|
|
|
М0М |
n |
|
|||||
Так как |
|
= (x-x0; y-y0), то |
|
||||||||
М0M |
|
||||||||||
|
|
|
A(x-x0) + B(y–y0) = 0. |
(1.9.1) |
|||||||
Обозначив – Ax0–By0 = C, заключаем, что в декартовой системе координат координаты точек прямой, и только они, удовлетворяют уравнению
Ax + By + C = 0. |
(1.9.2) |
Таким образом, мы доказали теорему.
Теорема 1. В декартовой системе координат любая прямая линия на
плоскости задается линейным уравнением (1.9.2), причем A2 B2 0 (A, B – заданные действительные числа).
Справедливо также обратное утверждение.
Теорема 2. Каждое линейное уравнение вида (1.9.2) в декартовой системе координат на плоскости определяет прямую линию, причем
A2 B2 0 (A, B – заданные действительные числа).
Рассмотренные теоремы полностью решают вопрос об уравнении прямой на плоскости. Уравнение вида (1.9.2), или ему эквивалентное (1.9.1), на-
зывается общим уравнением прямой.

98
Геометрический смысл общего уравнения прямой заключается в том, что оно описывает прямую, проходящую через точку M0(x0; y0) перпендику-
лярно вектору n = (A; B), который называется нормальным вектором прямой:
M0(x0,y0) L n =(A; B).
Определение. Общее уравнение прямой называется полным, если все его коэффициенты A, B и C отличны от нуля. Если хотя бы один из них равен нулю, то уравнение называется неполным. Рассмотрим все возможные виды
неполных уравнений: |
|
|
1) C = 0 O L; |
2) A = 0 L || Ox; |
3) B = 0 L || Oy; |
4) A = C = 0 L Ox; 5) B = C = 0 L Oy.
Для полного исследования прямых вполне достаточно использовать общее уравнение прямой. Однако прямая – это один из наиболее простых геометрических объектов. Поэтому прямая в той или иной форме встречается в различных задачах науки и техники. Особенно если учесть, что между прямыми и линейными уравнениями существует взаимно однозначное соответствие. В связи с этим большое значение приобретает разработка наиболее эффективных методов решения задач, в которых используется понятие прямой. С этой целью вводятся различные формы уравнений прямой.
Уравнение прямой с угловым коэффициентом. Если в общем уравне-
нии прямой B 0, то его можно привести к виду, которое обычно изучается в школьном курсе математики:
y = kx+b,
где k = –A/B, b = –C/B. Геометрический смысл коэффициента k – это тангенс угла наклона прямой к оси Ox, т.е. k = tg , b – это отрезок, отсекаемый прямой на оси Oy.
Найдем уравнение прямой, проходящей через точку M0(x0; y0) в направлении, определяемой угловым коэффициентом k. Поскольку M0 L, то ее координаты должны удовлетворять уравнению, т.е.
y0 = kx0+b.
Вычтем это уравнение из основного уравнения, в результате получим
y – y0 = k (x – x0).
Каноническое уравнение прямой. Поставим задачу: найти уравнение
прямой, проходящей через точку M0(x0; y0) и параллельной вектору s =(l; m). Очевидно, что такая прямая однозначно определяется точкой M0 и вектором
s . Точка M(x; y) лежит на указанной прямой тогда и только тогда, когда векторы М0M и s коллинеарны, т.е. координаты этих векторов пропорциональ-
ны (рис.1.9.2):
x x0 |
|
y y0 |
. |
(1.9.3) |
l |
|
|||
|
m |
|
||