

В первом случае |
|
|
|
|
|
|
|
|
|
|
|
|
|||
K( z ) = Z |
{ |
K |
|
(s )K s( )= Z |
ì1 - e-sT |
|
K ü |
= |
z -1 |
Z |
ì |
K |
ü. |
||
фу |
í |
|
|
|
ý |
|
í |
|
|||||||
|
|
} |
s |
|
|
|
z |
|
ý |
||||||
|
|
|
|
|
î |
|
s +1þ |
|
îs( s +1)þ |
||||||
Разложим выражение в фигурных скобках на простые дроби.
|
|
K |
|
= |
b1 |
+ |
|
b2 |
; b = |
|
sK |
|
|
|
|
|
|
= K; b |
2 |
= |
K (s +1) |
|
|
|
|
|
|
|
|
= -K . |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
s(s +1) |
|
|
|
|
s |
|
|
|
|
s +1 |
1 |
|
|
|
s(s +1) |
|
|
|
|
|
|
|
|
|
|
|
|
s(s +1) |
|
s=-1 |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s =0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
По таблице соответствий находим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
ìK |
|
|
|
|
|
K ü |
|
|
|
z |
|
|
|
|
|
|
|
z |
|
|
|
|
|
æ z |
|
|
|
|
|
z |
ö |
|
|
|
|
||||||||||||||||||||||||
|
|
|
Z í |
|
|
|
|
|
|
- |
|
|
|
|
|
|
ý |
= K |
|
|
|
|
|
|
- K |
|
|
|
|
|
|
|
= K |
ç |
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
÷ . |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z - e-T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
î s |
|
|
|
s +1þ |
|
|
z -1 |
|
|
|
|
|
|
è z -1 z - e-T |
ø |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
Дискретная передаточная функция |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
z -1 |
æ |
z |
|
|
|
|
|
z |
|
|
|
ö |
|
æ |
|
|
z -1 |
|
ö |
|
|
|
|
1 - e-T |
|
||||||||||||||||||||||||||
|
|
K( z ) = |
|
|
|
|
|
|
|
K ç |
|
|
- |
|
|
|
|
|
|
|
÷ |
= K ç1 - |
|
|
|
|
|
|
÷ |
= K |
|
|
|
|
|
|
|
|
|
|
|
. |
|
||||||||||||||||||||
|
|
|
z |
|
|
|
|
|
z - e |
-T |
|
z - e |
-T |
|
z - e |
_ T |
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è z -1 |
|
|
|
|
|
|
|
ø |
|
è |
|
|
|
|
ø |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
Установившаяся |
ошибка |
|
|
по |
|
|
|
положениюxуст0 (kT ) = |
|
|
|
|
|
V |
|
|
|
, где V =1, |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 + K0 |
|
||||||||||||||||
K0 |
= lim K (z )= |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
z®1 |
|
1 |
+ K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Во втором случае |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
z -1 |
|
|
|
ì K |
ü |
z -1 Tz |
|
|
|
|
|
T |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
1 |
|
||||||||||||||||||||||
|
K( z ) = |
|
|
|
|
|
|
Z í |
|
|
ý = |
|
|
|
|
|
|
|
|
|
|
= |
|
|
, |
xуст |
(kT ) = |
|
|
|
|
= |
|
|
|
|
|
= 0. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
z |
|
|
|
|
|
îs |
þ |
|
|
|
|
|
|
|
|
|
|
z -1 |
|
|
|
|
|
|
|
|
|
|
1 + K0 |
1 + ¥ |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
z ( z -1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
Эти результаты согласуются с теоретическими выкладками. Таким образом, дискретная система сохраняет порядок астатизма непрерывной части.
5.СИНТЕЗ ДИСКРЕТНЫХ СИСТЕМ
При синтезе дискретных систем ставится та же задача, что и для непрерывных систем – обеспечить требуемые показатели качества управления. В непрерывных системах эта цель достигается включением в контур управления аналоговых регуляторов или корректирующих устройств, при этом определяется их место включения, динамическая структура и параметры. В случае дискретных систем возможности синтеза шире, т.к. помимо аналоговых могут применяться дискретные регуляторы и корректирующие устройства, а при использовании средств вычислительной техники– вычислительные алгоритмы коррекции.
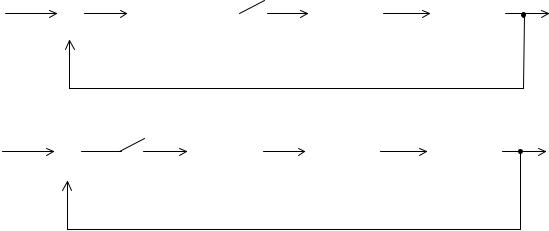
Рассмотрим две структурные схемы дискретных систем с коррекцией
(рис. 5.1).
49
a |
+ |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
v |
|
å |
|
|
Kk (s) |
|
T |
|
|
KФУ (s) |
|
|
|
K |
НЧ ( s) |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
б |
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|||
å |
KФУ (s) |
|
|
Kk (s) |
|
|
|
KНЧ ( s) |
|||||||||||
|
|
T |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 5.1. Структурные схемы дискретных систем с коррекцией:
а – коррекция на входе ключа, б – коррекция на входе непрерывной части
Первый тип систем (рис. 5.1, а) характеризуется непрерывным сигналом ошибки и непрерывным выходным сигналом, поэтому при синтезе корректирующих устройств можно непосредственно применять методы непрерывных систем.
5.1. Замена дискретной системы эквивалентной непрерывной системой
В случае систем второго типа(рис. 5.1, б) задача усложняется. В инженерной практике обычно эту структурную схему сводят к эквивалентной - не прерывной схеме на основании следующих преобразований:
¥ |
¥ |
|
|
|
|
¥ |
|
|
|
|
|
|
|
|
|
|
||
X * (s) = åx(kT )e-skT , а X (s) = òx(t)e-st dt = åx(kT )e-skTT . |
(5.1) |
|||||||||||||||||
k =0 |
0 |
|
|
|
|
|
k =0 |
|
|
|
|
|
|
|
|
|
||
Моделью идеального импульсного элемента можно считать |
|
|||||||||||||||||
KИИЭ |
= |
X *(s) |
= |
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
X (p) T |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для экстраполятора нулевого порядка KФУ (s) = |
1- e-sT |
|
||||||||||||||||
|
|
|
|
. |
|
|
|
|
|
|
||||||||
s |
|
|
T |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
1- e |
- jwT |
|
|
T |
|
sin w |
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||||||
Как было показано ранее, KФУ |
( jw )= |
|
|
= Te- jw |
|
|
2 |
. |
|
|||||||||
|
|
2 |
|
|||||||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
jw |
|
|
|
|
|
|
wT |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||
50
|
wT |
|
|
sin |
wT |
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Если |
=1, то |
2 |
|
=1, |
KФУ ( jw )= Te- jw |
|
|
|
|
и |
|
передаточная |
функция им- |
|||||||||||||||
|
|
2 |
|
|||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||
2 |
|
|
|
wT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
пульсного элемента |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
KИЭ (s) = KИИЭ (s)KФУ (s) = |
1 |
|
Te-s |
T |
= e-s |
T |
|
||||||||||||||||
|
|
|
|
|
|
|
|
. |
|
(5.2) |
||||||||||||||||||
|
|
|
|
|
|
2 |
2 |
|||||||||||||||||||||
|
|
|
|
|
T |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, реальный импульсный элемент с устройством хранения |
||||||||||||||||||||||||||||
информации вносит запаздывание, равное |
T |
. Преобразованная таким образом |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
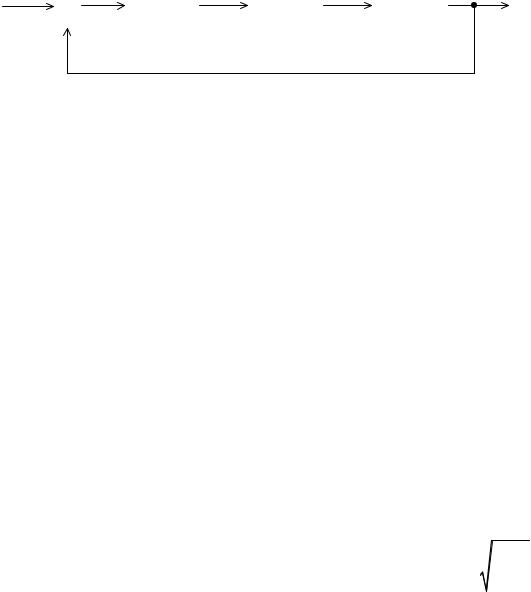
структурная схема представлена на рис. 5.2. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
v + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|||
|
|
|
x |
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
å |
|
-s |
|
|
Kk (s) |
|
|
|
|
|
|
KНЧ (s) |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
- |
|
|
|
|
|
e 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 5.2. Преобразованная структурная схема дискретной системы
На практике при моделировании применяют более точное выражение:
|
T |
1 - s |
T |
|
|
|
|
|||
|
|
|
|
|||||||
KИЭ (s) = e-s |
|
= |
2 |
. |
(5.3) |
|||||
2 |
||||||||||
|
||||||||||
|
|
|
1 + s |
T |
|
|
|
|||
|
|
|
|
|
||||||
|
|
|
2 |
|
|
|
|
|||
Как следует из(5.3), эта передаточная функция соответствует немини- мально-фазовому звену.
При принятии решения о замене дискретной системы эквивалентной непрерывной системой необходимо сравнить значение периода дискретизацииT с рядом величин, влияющих на процессы в системе. Эквивалентирование возможно при выполнении ряда условий:
1. |
T = |
p |
|
, где wmax – наибольшая частота возмущающих и задающих |
||||||
w |
|
|
||||||||
|
|
max |
|
|
|
|||||
сигналов. Обычно принимают wmax = (2 ¸ 5)wc . |
|
|
|
|||||||
2. |
T = |
tp |
|
, где tp – время регулирования, а n – порядок системы. |
|
|
|
|||
n |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||||
3. |
В следящих системах с учетом динамической точности T = |
8eдоп |
|
, где |
||||||
|
||||||||||
eдоп – заданная |
|
ошибка слежения, v&&max – максимальное ускорение |
v&&max |
|||||||
|
входного |
|||||||||
сигнала. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
51 |
||
4. С учетом ухудшения запаса устойчивостиT = (0,1 ¸ 0,5) wp , где wp – рабочая частота сигналов в системе.
wp , где wp – рабочая частота сигналов в системе.
5. С учетом показателя колебательности T = ( 2 wc ) M
wc ) M  (M +1).
(M +1).
|
|
Из всех ограничений выбирают наиболее жёсткое. |
|
|
||||||||||||||||||
|
|
После этого осуществляется расчет коррекции методами непрерывных |
||||||||||||||||||||
систем. |
Правильность |
выбора |
величины |
|
|
периода |
|
дискретизации |
||||||||||||||
подтверждается результатами компьютерного моделирования системы. |
|
|
||||||||||||||||||||
|
|
Пример 5.1. Оценить |
влияние величины периода дискретизацииT на |
|||||||||||||||||||
процессы в системе путем моделирования. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
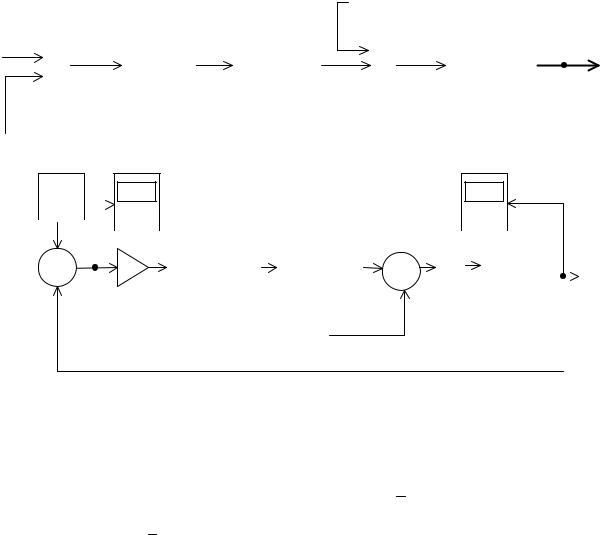
|
|
Пусть |
структура скорректированной |
системы |
соответствует |
рис. 5.3, a. |
||||||||||||||||
Схема моделирования в SIMULINK приведена на рис. 5.3, б. |
|
|
||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M C |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
||||||||
|
|
|
|
|
K |
|
|
Kk |
|
|
|
|
||||||||||
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
- |
|
|
|
|
|
|
|
|
|
||||||||||
+ |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|||||
|
|
å |
|
23000 |
|
|
|
0, 052s +1 |
|
+ |
å |
|
|
|
0,0047 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
s(0,12s +1) |
|
|
|
||||||
|
|
- |
|
|
|
|
0, 003s +1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б v 1
|
|
|
|
|
|
|
|
e-s |
T |
|
Kk |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
+ |
|
|
|
|
|
|
|
-.001s +1 |
|
|
0,052s +1 |
+ - |
1 |
|
|
|
.0 0 4 7 |
y |
|||||||||
- |
|
|
|
|
|
|
|
.001s +1 |
|
|
|
0,003s +1 |
|
|
s |
|
|
|
|
|
|
|
|||||
K1 = 23000 |
|
|
|
|
|
.1 2 s + 1 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
MC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.3. Скорректированная система:
а– структурная схема, б – схема моделирования в SIMULINK
Врезультате исследования системы при Т = 0,002 с кривые переходного
-s T
процесса в непрерывной системе(без элемента e 2 ) и с учетом дискретиза-
-sT
ции (при наличии e 2 ) практически совпали (рис. 5.4, а). При T » 0, 01 c в системе значительно возрастает перерегулирование (рис. 5.4, б), а при T = 0, 03 – процесс колебательный, расходящийся (рис. 5.4, в).
52
а |
б |
в |
Рис. 5.4. Переходные процессы: а – в непрерывной системе и в дискретной при T = 0, 002 c ; б – в дискретной системе при T = 0, 01 c ; в – в дискретной системе при
T = 0, 03 c
p
Величина T =0,002c соответствует условию T = 10wmax , где wmax » 2wc = = 2 ×83 =166 с-1 . В данной системе частота среза wс » 83 с-1 .
5.2. Синтез цифровых систем методом w-преобразования
Рассмотрим цифровую систему со структурой, приведенной на рис. 5.5.
V (s) + |
|
|
|
|
|
Y (s ) |
|
|
D (z ) |
|
KЭНЧ (s) |
||
å |
T |
|
|
|||
|
|
|
||||
|
|
|
|
|
|
-
KОС (s)
Рис. 5.5. Цифровая система управления: D (z )-цифровой регулятор, KОС (s) -датчик
Передаточная функция замкнутой системы KЗ |
(z) = |
|
D(z)KЭНЧ |
(z) |
, |
|
+ D(z)(KЭНЧ KОС )(z) |
||||
|
1 |
|
|||
а характеристическое уравнение |
|
|
|
|
|
1 + D(z)(KЭНЧ KОС )(z) = 0 . |
|
(5.4) |
|
||
Будем рассматривать корректирующие устройства первого порядка вида:
D (z )= |
Kd (z - z0 ) |
, |
(5.5) |
|
|||
|
z - zp |
|
|
где z0 – нуль, zp – полюс, Kd – коэффициент передачи передаточной функции
D(z).
53