


3. Полуустойчивый предельный цикл. С одной стороны к нему стремятся соседние фазовые траектории, с другой стороны сходят. Возможны два варианта: полуустойчивый предельный цикл в сторону устойчивости(рис. 2.10, а), когда движение всегда устойчиво, так как при любых рассогласованиях система придет в особую точку– начало координат и полуустойчивый предельный цикл в сторону неустойчивости(рис. 2.10, б), движение всегда неустойчиво, так как при любых начальных отклонениях процессы расходятся.
a |
x& |
б |
x& |
|
|
0 |
0 |
x |
x |
Рис. 2.10. Полуустойчивый предельный цикл:
а – в сторону устойчивости, б – в сторону неустойчивости
2.2. Методы построения фазовых портретов
При построении фазовых портретов используют методы решения уравнений по участкам, изоклин, Льенара, d-метод.
Метод решения уравнений по участкам. Поясним этот метод на примере.
Пусть НСАУ имеет структуру, приведенную на рис. 2.11.
v = 0 

|
|
|
|
|
|
|
Рис. 2.11 |
|
|
|
|
|
|
|
||||
Дифференциальное уравнение |
системы Tx&&+ x& + F (x)K = 0. Обозначим |
|||||||||||||||||
x = -y; x& = -y& . Тогда T |
dy& |
+ y& = KF (x) |
или |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
dy& |
ìb, x > a, y < a, |
|
|
|
|
||||||||
|
|
|
|
|
ï |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
T |
|
|
+ y& = K í0, |
|
x |
< a, |
y |
< a, |
(2.5) |
||||||
|
dt |
|||||||||||||||||
|
|
|
|
|
ï-b, |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
x |
< -a, y > a. |
|
|
|
|
||||||||
|
|
|
|
|
|
|
î |
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим |
участок, |
соответствующий |
зоне нечувствительности, |
где |
||||||||||||||
F (x) = 0 . Из (2.5) |
T |
dy& |
+ y& = 0. Так как |
dy |
= y& , |
то dt = |
dy |
и T |
dy& |
y& = -y& |
или |
|||||||
|
|
|
y& |
|
||||||||||||||
|
|
dt |
|
|
|
|
dt |
|
|
|
dy |
|
||||||
dy& = - 1 dy , откуда
T
85

|
|
|
|
|
|
|
y& = - |
1 |
y + C . |
|
|
|
|
(2.6) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
T |
0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
На |
участке, где F(x) = -Kb (x < -a; y > a), |
дифференциальное |
уравнение |
|||||||||||||
T |
dy& |
+ y& = -Kb. После подстановки dt = |
dy |
получим T |
dy& |
y& = - y& - Kb, |
откуда |
|||||||||||
|
|
|
||||||||||||||||
|
dt |
dyy&& |
|
|
|
|
|
|
y& |
|
|
dy |
|
|||||
dy = -T |
|
. Возьмем интеграл от обеих частей последнего равенства и пре- |
||||||||||||||||
|
|
|||||||||||||||||
|
|
|
y& + Kb |
|
|
dy&( y& + Kb - Kb) |
|
|
|
|
||||||||
образуем правую часть: òdy = -T ò |
+ C1, откуда |
|
||||||||||||||||
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
y& + Kb |
|
|
|
|
|
||||
|
|
|
|
|
y = T é |
|
-dy& + |
|
|
Kb |
dy& |
ù |
+ C . |
|
||||
|
|
|
|
|
|
|
|
|
ú |
|
||||||||
|
|
|
|
ê |
ò |
|
|
ò y& + Kb |
1 |
|
|
|
||||||
|
|
|
|
ë |
|
|
û |
|
|
|
|
|||||||
|
|
Окончательно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
y = T éKb ln ( y& + Kb) - y& |
ù + C . |
(2.7) |
|||||||||||
|
|
|
|
ë |
|
|
|
|
|
|
|
|
û |
1 |
|
|
|
|
Участок, где F (x) = Kb , исследуется аналогично. Получаются уравнения, симметричные рассмотренным.
Фазовый портрет, построенный по полученным выражениям, имеет вид,
приведенный |
на |
рис. 2.12, а |
примерная кривая |
процесса y(t) соответствует |
||||||
рис. 2.13. |
|
|
|
|
|
|
|
|
||
|
-a |
y& |
a |
|
|
|
|
|
|
|
|
M5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
y(t) |
M1 |
|
|
|
M 4 |
|
g |
|
0 |
|
|
||||
|
M 6 |
|
y |
|
|
|
|
|||
|
|
|
|
g |
M1 |
M 0 |
|
|
|
|
|
M3 |
|
M 2 |
|
M 6 |
|||||
|
|
|
+a |
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
M 2 |
|
-a |
M3 |
M |
M5 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
4 |
|
Рис. 2.12. Фазовый портрет НСАУ |
Рис.2.13. Кривая процесса НСАУ |
|||||||||
Метод изоклин. Пусть dy& = f1 (y, y&) = N , где N – наклон фазовой траекто- dy f2 (y, y&)
рии на плоскости (y&, y) .
Если на фазовой плоскости выбрать точки, которым соответствует один и
тот же наклон Ni |
= |
f1 |
(yi , y&i ) |
, то соединив их, можно получить линию, называ- |
f2 |
|
|||
|
|
(yi , y&i ) |
||
емую изоклиной (изоклина – это геометрическое место точек на фазовой плоскости, соответствующих одному постоянному значению наклона интегральных
86

кривых), а множество линий для разных значенийN – |
семейство изоклин |
||
(штриховые линии на рис. 2.14). Уравнение изоклин |
|
|
|
y&i = f (Ni , yi ) . |
|
|
(2.8) |
Построение фазовой траектории |
|
y& N |
|
осуществляется так (рис. 2.14): строят |
|
1 |
N2 |
изоклины; далее из начальной точки |
|
|
|
|
M 0 |
N3 |
|
M0 проводят два луча с наклонамиN1 |
|
||
и N2 до пересечения со следующей |
|
M1 |
|
изоклиной; отрезок, отсекаемый ими |
|
||
|
|
|
|
на следующей изоклине делят попо- |
|
|
|
лам, точка M1 будет исходной точкой |
0 |
|
y |
для следующего построения. |
|
||
|
|
|
|
Рис. 2.14. Построение фазовой траектории
Таким образом, фазовая траектория – это линия, проходящая через средние точки. Точность построения тем выше, чем больше изоклин.
Проиллюстрируем эту методику построением фазового портрета для системы из предыдущего примера.
Для участка |
F (x) = 0 T |
dy& |
+ y& = 0; |
dt = |
dy |
|
|
; T |
dyy&& |
+ y& = 0, откуда урав- |
||||||||||
dt |
|
|
||||||||||||||||||
|
dy& |
|
|
1 |
|
|
|
|
|
y& |
|
|
|
|
|
|
dy |
|||
нение изоклин |
|
= - |
= N (tga = N ) (рис. 2.15, |
|
|
|
y |
|
< a ). |
|||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
||||||||||||||||||
|
dy |
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
-a |
y& |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M5 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
M 4 |
|
M 6 |
g |
0 y |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
gM1 |
||||||||
|
|
|
|
|
|
M3 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M 2
Рис. 2.15. Построение фазового портрета методом изоклин
Для участка F (x) = -Kb |
dy& |
= - |
Kb + y& |
= N, откуда y& = - |
Kb |
. Анало- |
dy |
|
1 + NT |
||||
|
|
Ty& |
|
|||
гично получается уравнение изоклин и для последнего участка. Сравнение рис. 2.12 и рис. 2.15 показывает, что результаты совпали.
Достоинством метода изоклин является возможность построения фазовых траекторий для любых начальных условий, а недостатками – трудоемкость процесса построения и отсутствие возможности исследования системы при изменении параметров во времени или в зависимости от изменения внешних воздействий.
87
Метод Льенара. Этот метод применяется в том случае, когда свободное движение описывается уравнением вида:
&x& + f (x&) + x = 0 . |
(2.9) |
Наклон на фазовой плоскости определяется как
dx& |
= - |
f (x&) + x |
. |
(2.10) |
dx |
|
|||
|
x& |
|
||
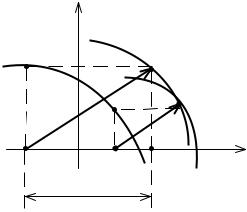
Льенар предложил на фазовой плоскости строить кривую x = - f (x&) , а затем определять направление движения траектории согласно следующему алгоритму:
1. |
Выбирается начальная точка P |
(x& , x ) |
и осуществляется движение из |
||
|
1 |
1 |
1 |
|
|
этой точки до пересечения с кривой x = - f (x&) . |
|
|
|||
2. |
Из точки пересечения опускается перпендикуляр на ось x и находится |
||||
точка Q1 . |
|
|
|
|
|
3. |
Радиусом R , равным длине отрезка [ P , |
Q ], проводится дуга окруж- |
|||
|
1 |
|
|
1 |
1 |
ности с центром в точке Q1 . |
|
|
|
|
|
4. |
На этой дуге произвольно выбирается точка P2 и процесс повторяется: |
||||
осуществляется движение до пересечения |
с |
кривойx = - f (x&) , определяется |
|||
Q2 , радиус R2 и т.д.
Для увеличения точности построения фазовых траекторий дуги окружности рекомендуется выбирать минимальной длины.
x&
x = - f (x&) |
x&1 |
P |
|
|
1 |
|
|
P2 |
Q1 |
Q2 |
x |
|
|
1 |
x
x + f (x&)
Рис. 2.16. Построение фазового портрета методом Льенара
К методу Льенара близок d-метод построения фазовых портретов, который также основан на построении окружностей, отрезки дуг которых составляют фрагменты фазовых траекторий, В отличие от метода Льенараd-метод позволяет исследовать процессы в системах с изменяющимися во времени коэффициентами, а так же вынужденные движения.
88