

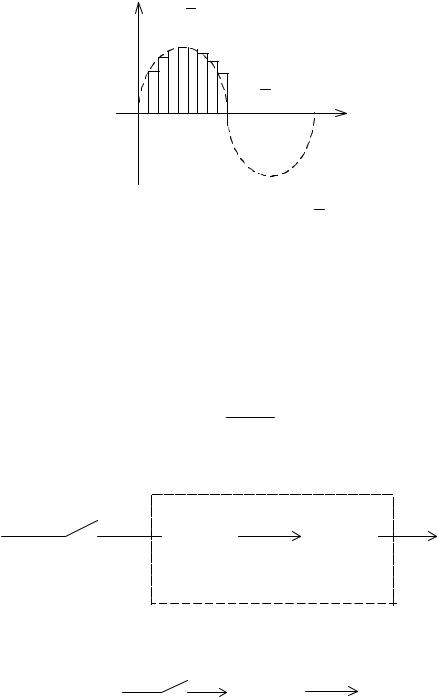
На рис. 2.14 представлены сигналы на входе квантователя и на выходе экстрополятора, точнее – на входе ИЭ и на его выходе.
x(t), x (t)

 x(t)
x(t)
x(t)
0 |
|
|
|
|
|
|
|
|
|
t |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.14. Входной x(t) и выходной x (t) сигналы ИЭ
2.9. Импульсная передаточная функция разомкнутой системы
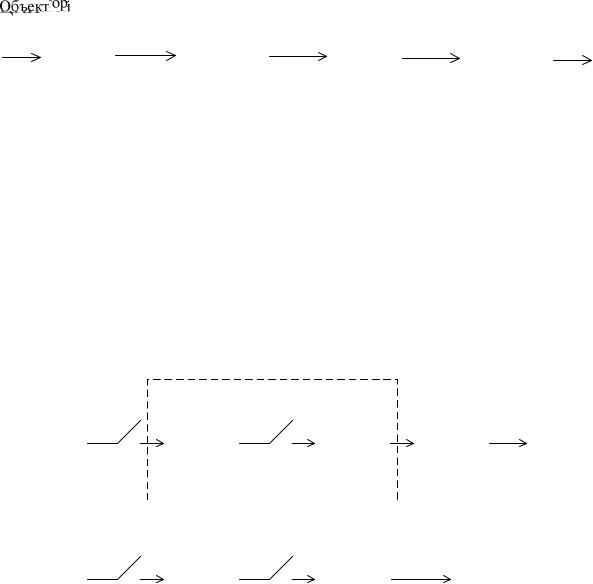
Рассмотрим ИСАУ, изображенную на рис. 2.15.
Передаточную функцию экстраполятора объединяют с передаточной функцией непрерывной части:
KЭНЧ (s) = 1 - e-Ts KНЧ (s) , s
где KЭНЧ(s) – передаточная функция эквивалентной непрерывной части.
X (s) |
X * (s) |
1 |
- e |
-Ts |
|
K |
|
(s) |
Y (s) |
||
|
|
|
|
|
НЧ |
|
|||||
|
T |
|
|
s |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
KЭНЧ (s)
|
|
|
¯ |
|
|
|
|
|
|
X (s) |
X * (s) |
|
|
|
|
Y (s) |
|
|
KЭНЧ (s) |
|
||||||
|
T |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Рис. 2.15. Структура ИСАУ |
|
||||||
Полагая начальные условия нулевыми, можно получить: |
|
|||||||
* |
|
* |
|
* |
1 ¥ |
|
|
|
|
é |
|
ù |
= |
|
å Y (s + jkws ) , |
(2.47) |
|
|
|
|
||||||
Y (s) = ëKЭНЧ |
(s) X (s)û |
|
||||||
|
|
|
|
|
T k =-¥ |
|
||
29

|
* |
|
1 ¥ |
|
|
|
|
* |
|
* |
|
||
откуда Y |
|
(s) = |
|
|
å K |
ЭНЧ (s + jkws ) X |
|
(s + jkws ) , а |
так как X (s) – |
периодическая |
|||
|
|
|
|
||||||||||
|
|
|
T k =-¥ |
|
|
|
|
|
|
|
|||
функция, то X * (s + jkws ) = X * (s) и |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
¥ |
|
|
|
|
||
|
|
|
|
|
|
|
Y * (s) = |
1 |
å KЭНЧ (s + jkws ) X * (s) . |
(2.48) |
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
T k =-¥ |
|
|
|||
Сделав в (2.48) подстановку z = eTs, получим Y ( z) = KЭНЧ (z) X (z) . |
|||||||||||||
KЭНЧ (z) = |
Y (z) |
|
называется |
|
импульсной |
передаточной |
функцией -разо |
||||||
X (z) |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
мкнутой САУ.
Рассмотрим ИСАУ различных конфигураций, непрерывная часть которых состоит из двух передаточных функций (рис. 2.16).
Для структуры ИСАУ, каждой непрерывной части которой предшествует ИЭ (рис. 2.16, а) передаточная функция системы равна произведению импульсных передаточных функций отдельных частей:
K (z) = KЭНЧ 1 (z)KЭНЧ 2 (z) . |
(2.49) |
Для структуры ИСАУ, в которой перед второй непрерывной частью нет |
|
ИЭ, общая передаточная функция системы |
|
K (z) = KЭНЧ (z) , |
(2.50) |
где KЭНЧ (z) = Z {KФУ (s)KНЧ 1 (s)KНЧ 2 (s)}.
Структура ИСАУ, приведенная на рис. 2.16, в, не имеет импульсной передаточной функции, поскольку входной сигнал не квантуется.
X (s) |
KЭНЧ 2 (s) Y (s) |
KЭНЧ 1 (s) |
X (s) |
K НЧ 2 (s) Y (s) |
KЭНЧ 1 (s) |
X (s) |
KНЧ 1 |
(s) |
KЭНЧ 2 (s) Y (s) |
|
Рис. 2.16. Структуры ИСАУ
30
Рассмотрим цифровую систему (рис. 2.17).
x (t ) |
|
|
|
|
|
T |
|
|
|
|
|
|
KНЧ (s) |
y(t) |
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
x(kT) |
|
|
u(k |
|
|
|
u (kT ) |
|
|||||||
|
|
|
|
) |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Рис. 2.17. Цифровая САУ |
|
|
|||||||||||
Коэффициент передачи АЦП d |
|
= |
|
1 |
|
, где a – число разрядов, а ко- |
||||||||||
АЦП |
2a -1 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
эффициент передачи ЦАП dЦАП = 2a -1. При одинаковом числе разрядов АЦП и ЦАП их общий коэффициент передачи равен единице. Обычно a ³10 , тогда
2a -1 =1023 и статическую характеристику АЦП и ЦАП можно считатьли нейной.
При расчетах дискретных систем АЦП, цифровой регулятор и ЦАП заменяют моделью, как показано на рис. 2.18, а, всю систему окончательно – моделью рис. 2.18, б.
a
АЦП-ЦР-ЦАП
|
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1- e- sT |
|
|
|
K |
НЧ (s) |
y(t) |
|||||
|
|
|
|
|
|
D(z) |
|
|
|
|
|
|
|
|
||||||||||||||
|
T |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|||
|
|
|
|
|
|
D(z) |
|
|
|
|
|
|
KНЧ (s) |
|
|
|
||||||||||||
|
T |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Рис. 2.18. Модель цифровой системы |
|
|
||||||||||||||||||||||
|
Тогда K (z) = Z {KЭНЧ (s)}D(z) , где D(z) – дискретная передаточная функ- |
|||||||||||||||||||||||||||
ция цифрового регулятора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Пример 2.5. |
Найти дискретную |
передаточную |
функцию разомкнутой |
||||||||||||||||||||||||
ИСАУ, если KНЧ (s) = |
1 |
|
|
, а KФУ (s) |
|
1 - е-Ts |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
= |
|
|
. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
s +1 |
|
|
|
|
|
s |
|
|
|
|
|
|
||||||||||||
|
Запишем KЭНЧ |
(s) = |
1 - e-Ts |
1 |
= (1 - e-Ts ) |
|
1 |
|
|
. Обозначим eTs = z, тогда |
||||||||||||||||||
|
|
s |
|
|
s +1 |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s(s +1) |
|
|
|||||||||
KЭНЧ |
(s) = (1 - z-1 ) |
|
1 |
|
|
|
= |
z -1 |
|
M (s) |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
s(s +1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
z |
N (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
31 |
|
Разложим |
M (s) |
= |
|
|
1 |
|
|
|
|
|
|
|
на простые дроби |
M (s) |
= |
|
b1 |
|
+ |
b2 |
, |
|||||||||||||||||||||||||||||||
|
|
|
|
s(s +1) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
N (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N (s) |
s - s |
s - s |
||||||||||||||||||||||||||
s1 = 0; s2 = –1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 = (s - s1 ) |
M (s) |
|
|
|
|
= |
|
|
|
(s - s1 ) |
|
|
|
|
|
|
|
|
|
= |
|
1 |
|
|
=1. |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
N (s) |
|
|
|
|
|
|
|
|
(s - s )(s |
- s |
|
) |
|
|
|
|
|
0 - (-1) |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s=s1 |
|
|
1 |
|
|
|
|
2 |
|
|
|
|
s=s1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
b2 = (s - s2 ) |
M (s) |
|
|
|
= |
|
(s - s2 ) |
|
|
|
|
|
|
|
|
= |
|
1 |
|
= -1. |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
N (s) |
|
|
|
|
|
(s - s )(s |
- s |
|
|
) |
|
|
|
|
|
-1 - 0 |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
z -1æ |
|
|
|
|
|
|
|
s=s2 |
|
|
1 |
|
|
|
|
2 |
|
|
|
|
s=s2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Тогда KЭНЧ (s) = |
1 |
- |
1 |
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
ç |
|
|
|
|
|
|
|
÷. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
z |
|
|
|
|
s +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
è s |
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
· |
|
|
|
|
|
|
|
z |
|
|
|
1 |
|
|
|
· |
|
z |
|||||
По таблице соответствий находим: |
|
¾¾® |
|
|
|
|
|
|
; |
|
|
|
|
|
|
¾¾® |
|
|
||||||||||||||||||||||||||||||||||
s |
|
|
|
|
|
|
|
|
|
|
|
|
z - e-T |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
· |
|
|
|
|
z -1 s +1 |
· |
|
|||||||||||||||||
чательно K (z) = |
|
z -1 |
é |
|
z |
|
|
|
|
|
|
|
|
|
|
|
z |
|
ù |
|
z -1 |
|
|
|
|
|
|
|
1 - e-T |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
ê |
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
ú =1 - |
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
||||||||||||
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
-T |
|
z - e |
-T |
|
|
|
z - e |
-T |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
ë z |
-1 z - e |
|
û |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
причем
. Окон-
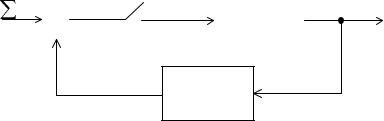
2.10. Импульсная передаточная функция замкнутой системы
Рассмотрим замкнутую ИСАУ, изображенную на рис. 2.19.
V(s) |
|
X (s) |
X |
*(s) |
KЭНЧ |
(s) |
Y (s) |
+ |
|
|
T |
|
|
||
|
|
|
|
|
|
|
|
-
KОС (s)
Рис. 2.19. Структура замкнутой ИСАУ
Y (s) = KЭНЧ (s) X * (s) ,
X (s) =V (s) - KОС (s)Y (s) =V (s) - KЭНЧ (s)KОС (s) X * (s) .
Если найти дискретные преобразования левой и правой частей последнего равенства, то получим X * (s) = V * (s) - (KЭНЧ KОС )* (s) X * (s) , откуда
X * (s) = |
V * (s) |
, X (z) = |
|
V (z) |
. |
1 + (KЭНЧ KОС )* (s) |
|
+ (KЭНЧ KОС )(z) |
|||
|
1 |
|
|||
Таким образом, замкнутая импульсная САУ имеет передаточную функцию по ошибке
32
Kx |
(z) = |
X (z) |
= |
1 |
(2.51) |
|
1 + (KЭНЧ KОС )(z) |
||||
|
|
V (z) |
|
||
и главную передаточную функцию
KЗ (z) = |
Y (z) |
= |
|
KЭНЧ |
(z) |
. |
(2.52) |
|
V (z) |
1 + (KЭНЧ KОС )(z) |
|||||||
|
|
|
|
|||||
В этих выражениях записи (×)*(s) и (×)*(z) показывают, что до осуществления операции дискретного преобразования Лапласа иz-преобразования необходимо перемножить соответствующие передаточные функции, после чего разложить на элементарные дроби и только после этого осуществлятьz- преобразование.
Рассмотрим замкнутую цифровую САУ (рис. 2.20).
V (s) |
|
|
X (s) |
|
|
|
|
|
|
|
|
Y (s) |
|
|
|
|
|
|
|
|
KНЧ |
(s) |
|||
v(t) |
|
|
|
|
|
|
|
|
|
y(t) |
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KОС (s)
Рис. 2.20. Структура цифровой САУ
Модель разомкнутой части соответствует рис. 2.18. Изображение сигнала ошибки в замкнутой системе X (s) =V (s) - KЭНЧ (s) X * (s)D* (s)KОС (s) , а изображение выходной координаты Y (s) = KЭНЧ (s)D* (s) X * (s) .
Подвергнув первое соотношение дискретному преобразованию Лапласа, получим
X * (s) = |
|
V * (s) |
. |
||
|
+ D* (s)(KЭНЧ KОС )* (s) |
||||
|
1 |
|
|||
Применяя к Y(s) z-преобразование и подставив в него полученное выра- |
|||||
жение X*(s), имеем |
|
|
|
|
|
|
|
|
D(z)KЭНЧ (z) |
|
|
Y (z) = |
|
V (z) . |
|||
1 + D(z)(KЭНЧ KОС )(z) |
|||||
Таким образом, передаточная функция замкнутой ЦСАУ будет
Kз |
(z) = |
|
D(z)KЭНЧ |
(z) |
. |
(2.53) |
|
+ D(z)(KЭНЧ KОС )(z) |
|||||
|
1 |
|
|
|||
33