

5.ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ В НЕЛИНЕЙНЫХ СИСТЕМАХ
Влинейных системах частота вынужденных колебаний совпадает с -ча стотой вынуждающего внешнего воздействия, амплитуда вынужденных колебаний в установившемся режиме связана с амплитудой внешнего гармонического воздействия линейной зависимостью, устойчивость вынужденных колебаний определяется только свойствами системы и не зависит от параметров внешнего вынуждающего воздействия.
Внелинейных же системах вынужденные колебания характеризуются следующими свойствами:
1.Вынужденные колебания содержат гармоническую составляющую на частоте, совпадающей с периодическим внешним воздействием и, кроме того гармоники, кратные этой частоте.
2.Амплитуда вынужденных колебаний связана с амплитудой вынуждающего воздействия нелинейной часто неоднозначной зависимостью.
3.Устойчивость зависит как от свойств системы, так и от параметров внешнего воздействия.
5.1. Определение параметров и устойчивости вынужденных колебаний (задача Дуффинга)
Предположим, что система описывается нелинейным дифференциальным уравнением
&&x + xx& + f (x ) = Ccoswt . |
(5.1) |
Пусть x = 0 (в системе отсутствуют потери энергии, т. к. x – характеризует затухание процесса), а решение уравнения (5.1), если C и w заданы, отыскивается в виде x (t ) = Acoswt .
Амплитуду A и частоту w вынужденных колебаний необходимо определить, но в общем случае строят следующие зависимости: A = f1 (w); A = f2 (C ).
Для решения задачи сначала определяют первую и вторую производные от x(t):
x& = w Asinwt,
&&x = -w2 Acoswt. |
(5.2) |
|
|
Пусть характеристика НЭ имеет вид: |
|
f (x) = w2 x ± x3h , |
(5.3) |
0 |
|
где h – некоторый параметр НЭ. Знак «плюс» выбирается, если НЭ имеет зону нечувствительности, «минус», если – насыщение.
110

|
3 |
3 |
3 |
|
3 é |
3 |
|
1 |
|
ù |
|
Найдем значение x |
|
= A |
cos |
wt = A |
ê |
|
coswt + |
|
cos3wt |
ú |
. Поскольку |
|
4 |
4 |
|||||||||
|
|
|
|
|
ë |
|
|
û |
|
величина третьей гармоники мала, |
|
|
|
|
||||||||
|
|
|
|
x3 » |
3 |
A3coswt . |
|
(5.4) |
||||
|
|
|||||||||||
4 |
|
|
|
|
|
|
|
|||||
Подставив найденные значения в |
исходное |
уравнение, запишем |
||||||||||
-w2 Acosw t + w02 Acosw t + |
3 |
hA3coswt = Ccoswt |
и, сократив левую и правую |
|||||||||
|
||||||||||||
4 |
|
|
|
|
|
|
|
|
|
|||
части этого выражения на coswt , получим уравнение Дуффинга: |
|
|
|
|||||||||
|
|
|
(w02 - w2 )A + |
3 |
h A3 = C . |
(5.5) |
||||||
|
|
|
|
|||||||||
4 |
|
|
|
|
|
|||||||
Решить это уравнение можно графически. Для этого представим (5.5) в |
||||||||||||
виде |
3 |
h A3 = C + A(w2 - w 02 ) и обозначим левую часть черезy1 |
= - |
3 |
hA3 , пра- |
|||||||
|
|
|||||||||||
4 |
|
|
|
|
|
|
|
|
4 |
|
||
вую через y2 = C + A(w2 - w 02 ).
Построим график левой и правой частей(рис. 5.1) и найдем зависимости
A = f1 (w) при C = const , |
A = f2 (C ) при w = const . |
|
|
|||||||
При изменении частоты график прямойy2 вращается. Это дает возмож- |
||||||||||
ность проследить за точками пересечения кривых y1, y2 |
при изменении частоты |
|||||||||
w и построить зависимость A = f1 (w) (рис. 5.2). |
|
|
||||||||
g |
|
|
|
y1 , y2 |
|
|
|
A |
|
|
|
|
|
|
|
|
|
¢ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
w = w0 |
¢¢¢ |
|
|
|||
|
|
|
|
A1 |
|
|
||||
|
|
|
|
C |
|
|
A |
A1 |
|
|
|
|
|
|
|
|
|
|
|||
' |
A0 A 0 |
'' |
''' |
|
|
¢¢ |
|
|
||
A |
2 |
A |
A |
|
|
A |
|
|
||
1 |
|
|
1 |
|
|
1 |
|
|
||
|
|
|
|
1 |
|
|
|
A2 |
|
|
y2 |
|
|
|
|
g |
y2 |
|
|
||
w > w0 |
|
|
|
w < w0 |
w < w0 |
w0 |
w < w0 w |
|||
|
|
|
|
|
|
|
|
|||
|
|
|
Рис. 5.1 |
|
|
|
|
Рис. 5.2 |
|
|
В |
реальных |
системах |
присутствуют потери мощности(x ¹ 0). В этом |
|||||||
случае АЧХ для различных значений параметра h имеют вид рис. 5.3.
111
A |
h = 0 |
h > 0 |
h < 0 |
c |
|
|
d |
|
b |
|
q |
|
|
e |
f |
0 |
a |
|
|
|
|
|
w0 |
w |
|
Рис. 5.3 |
|
При возрастающей частоте w и C = const амплитуда A возрастает на интервале abc, на cd несколько уменьшается и скачком принимает значениеe, затем снова убывает на ef. При уменьшении частоты w амплитуда A возрастает на интервале feq , затем скачком переходит в b и снова убывает на ba. Это явление получило название скачкообразного резонанса.
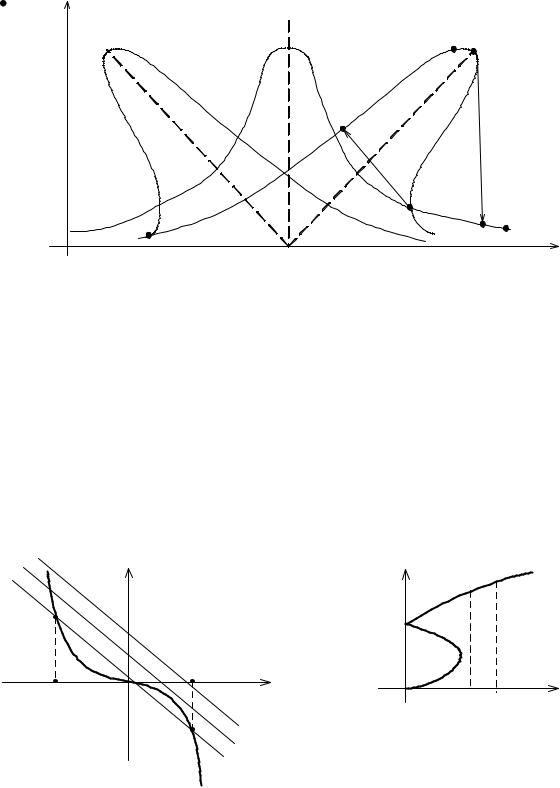
Чтобы построить амплитудную зависимостьA = f2(C), необходимо построить нелинейную характеристику y1 и семейство прямых y2, при различных значениях C. Изменяя значения параметра C , определяют точки пересечения семейства кривых y2 и y1, по которым строят искомый график зависимости
(рис. 5.4).
g |
y1 , y2 |
|
A |
|
|
|
|
|
|
|
|
|
A1 = A3 |
|
A |
0 |
A3 |
0 |
|
|
|
|||
1 |
|
C |
C0 |
C1 C2 C |
|
|
|||
|
|
2 |
|
C 1
C0
Рис. 5.4. A1 = A3 , так как характеристика симметрична при C0 = 0
Задача Дуффинга может быть решена при исследовании вынужденных колебаний нелинейных систем второго порядка вида(5.1). Если порядок системы превышает второй, то применяют метод эллипса, когда НЭ находится в канале ошибки или метод Гольдфарба, когда НЭ находится в цепи ОС.
112