


и практические вопросы сравнительно легко могут быть решены с помощью моделирования, которое дополняет первые две группы методов.
В инженерной практике чаще применяются методы: фазовой плоскости; основанные на теоремах А. М. Ляпунова; гармонической линеаризации нелинейных характеристик; цифрового интегрирования (моделирования).
2. МЕТОД ФАЗОВОГО ПРОСТРАНСТВА
2.1. Фазовое пространство
Метод фазового пространства относится к наиболее ранним точным аналитическим методам теории нелинейных систем.
Введем понятие фазового пространства. Пусть система n–порядка описывается дифференциальными уравнениями
ì |
dx1 |
|
|
= j (x , x , ... x , f , v), |
|
|||
|
|
|||||||
ï dt |
1 |
1 |
2 |
n |
|
|||
ï |
|
|
|
|
|
|
|
|
ïdx2 |
|
|
= j2 |
(x1 |
, x2 |
, ... xn , f , v), |
|
|
ï |
|
|
|
(2.1) |
||||
|
|
|||||||
í dt |
|
|
|
|
|
|
||
ïLLLLLLLLLLL |
|
|||||||
ï |
dxn |
|
|
|
|
|
|
|
ï |
|
|
= j |
(x , x , ... x , f , v) |
|
|||
|
|
|
|
|||||
ï |
|
|
|
n |
1 |
2 |
n |
|
î dt |
|
|
|
|
|
|
|
|
с начальными |
условиями x1 = x10 , x2 = x20 , …, xn = xn0 |
при t = 0 . В (2.1) f и |
|||||
v – возмущение |
и входное воздействие, а |
xi – переменные, имеющие в кон- |
|||||
кретной системе свой физический смысл. Это могут быть выходная координата |
|||||||
и ее производные. Если в (2.1) |
n = 3 , то x1 , |
x2 , x3 можно представить как пря- |
|||||
моугольные координаты (рис. 2.1). |
Начальные условия ( x10 , x20 , x30 ) опреде- |
||||||
x3 |
|
|
|||||
|
M 0 (t = 0) |
ляют координаты точки M 0 при t = 0 . По мере |
|||||
M |
развития процесса в системе точка M переме- |
||||||
|
x1 |
щается в пространстве |
и значенияx1 , x2 , x3 |
||||
0 |
изменяются. |
Точка M называется изображаю- |
|||||
|
|||||||
|
щей |
точкой, |
ее траектория – фазовой |
траекто- |
|||
|
|
||||||
x2 |
|
рией, |
а пространство ( x1 , x2 , x3 ) – |
фазовым |
|||
|
пространством. Если переменных n > 3 , то фа- |
||||||
Рис. 2.1. К понятию фазового |
зовое пространство будет n –мерным, а если |
||||||
пространства |
только две (система второго порядка), то фазо- |
||||||
вое пространство превращается в фазовую плоскость.
80
Рассмотрим поведение автономной линейной системы, описываемой
уравнением второго порядка |
|
|
|
|
|
|
|
|
|
|
||||
|
|
d 2 x |
+ a |
dx |
+ a |
x = 0 . |
(2.2) |
|||||||
|
|
dt2 |
dt |
|||||||||||
|
|
1 |
2 |
|
|
|
|
|
|
|||||
Обозначим скорость изменения координаты x , т.е. |
dx |
, через x& . Тогда |
||||||||||||
|
||||||||||||||
уравнение (2.2) примет вид |
|
|
|
|
|
|
|
|
dt |
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
dx& |
= -a x& |
- a x , |
dx |
= x& . |
|
|
|||||||
|
|
|
|
|
|
|
||||||||
|
dt |
1 |
|
2 |
dt |
|
|
|||||||
|
|
|
|
|
|
|
||||||||
Исключим из последней системы времяt, разделив первое уравнение на |
||||||||||||||
второе: |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
dx& |
= -a - a |
|
x |
. |
(2.3) |
|||||
|
|
|
|
|
|
|||||||||
|
|
|
|
dx |
1 |
2 |
|
x& |
|
|
||||
Решение уравнения (2.3) определяет семейство кривых на фазовой плоскости, которое называют фазовым портретом системы. При этом возможны шесть типовых случаев изображения портретов систем в зависимости от корней характеристического уравнения системы:
a2 - 4a |
2 . |
(2.4) |
l = - a1 ± 1 |
22
1.Корни вещественные отрицательные при a12 > 4a2 , a1 > 0 , a2 > 0 (система устойчивая, апериодический монотонный процесс) (рис. 2.2).1,2
x&
0 |
0 |
Рис. 2.2
2. Корни вещественные положительные при a12 > 4a2 , a1 < 0 , a2 > 0 (система неустойчивая, монотонный расходящийся процесс) (рис. 2.3).
81

x (t ) |
x& |
1
1
0 |
t |
0 |
|
|
Рис. 2.3
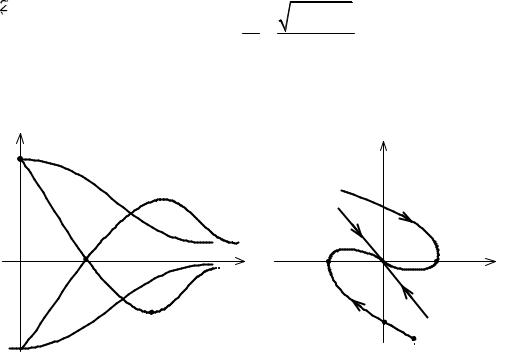
3. Корни комплексные, вещественные части отрицательные при a12 < 4a2 , a1 > 0 , a2 > 0 (система устойчивая, процесс колебательный сходящийся)
(рис. 2.4).
x&
0
0
Рис. 2.4
a2 |
4. |
Корни |
комплексные, |
вещественные |
части– положительные |
при |
|
< 4a , |
a < 0 , a |
2 |
> 0 (система |
неустойчивая, |
процесс колебательный |
расхо- |
|
1 |
2 |
1 |
|
|
|
|
|
дящийся) (рис. 2.5). |
|
|
|
|
|||
|
|
x (t ) |
|
|
|
x& |
|
0 |
t |
0 |
x |
|
|||
|
|
|
Рис. 2.5
5.Корни чисто мнимые при a1 = 0 , a2 > 0 . (в системе колебательная граница устойчивости, процесс незатухающий колебательный) (рис. 2.6).
82
x(t ) |
|
|
x& |
|
|
щA |
|
0 |
t |
0 |
x |
|
A |
||
|
|
|
|
|
Рис. 2.6. x (t ) = Asinwt, x& = w Acoswt |
|
|
6. Корни вещественные с разными знаками приa2 < 0 (система сначала стремится к устойчивому значению, а затем попадает в область неустойчивости, процесс апериодический расходящийся) (рис. 2.7).
x(t ) |
x& |
0 |
0 |
|
x |
||
t |
Рис. 2.7
Особые точки. В точках, которые соответствуют установившемуся со-
стоянию системы на основании(2.3) имеем: |
dx& |
= -a - a |
|
0 |
, т.е. наклон каса- |
|
dx |
2 0 |
|||||
|
1 |
|
||||
тельных к фазовым траекториям не определен. Такие точки называют особыми точками. Для рассмотренных шести случаев, особые точки называют соответ-
ственно: устойчивым узлом – (рис. 2.2), неустойчивым узлом – рис. 2.3, устойчивым фокусом – рис. 2.4, неустойчивым фокусом – рис. 2.5, центром –
рис. 2.6, седлом – рис. 2.7.
Отметим общие свойства фазовых траекторий:
1)через всякую точку фазовой плоскости, за исключением особых точек, проходит единственная фазовая траектория, это означает, что фазовые траектории не пересекаются между собой;
2)в верхней фазовой полуплоскости при возрастании времениt изображающая точка движется слева направо, в нижней полуплоскости движение происходит справа налево.
3)в точках, где x& = 0, f (x&, x)¹0 (не особых точках на оси абсцисс), фазовые траектории пересекают ось под прямым углом.
Фазовые портреты нелинейных систем. В нелинейных системах, как правило, существуют несколько особых точек. Возможны их самые различные
83

комбинации. В связи с этим для определения характера движения системы необходимо строить фазовый портрет НСАУ. При этом каждая нелинейная система имеет собственный фазовый портрет.
Выделим основные особенности фазовых портретов нелинейных систем: нелинейные системы в отличие от линейных могут иметь несколько особых точек, в том числе и бесчисленное множество; в нелинейных системах существуют замкнутые кривые – предельные циклы, к которым сходятся или от которых расходятся все остальные фазовые траектории.
Все фазовые портреты можно классифицировать по типу предельного цикла. Рассматривают три типа предельных циклов.
1. Устойчивый предельный цикл: к нему стремятся все соседние фазовые траектории.
В системе существуют установившиеся устойчивые незатухающие колебания (автоколебания). При больших начальных условияхa¢ колебания затухают, и система ведет себя как устойчивая. При начальных условиях внутри цикла a¢¢ колебания расходятся, что соответствует неустойчивому движению. Говорят, что система «устойчива в большом и неустойчива в малом» (рис. 2.8). В инженерной практике по виду предельного цикла можно определить амплитуду и частоту автоколебаний.
0 |
0 |
Рис. 2.8. Устойчивый предельный цикл
2. Неустойчивый предельный цикл: с него сходят все соседние фазовые траектории. В системе никогда не будет установившихся колебаний, так как при наличии сколь-нибудь малых возмущений они гаснут, либо расходятся, если лежат за переделами цикла. Система «неустойчива в большом и устойчива в малом» (рис. 2.9).
|
x& |
|
x(t ) |
|
· |
|
· |
|
|
|
|
· · |
0 |
· |
0 |
|
|
·
·
Рис. 2.9. Неустойчивый предельный цикл
84