

Исаченко Сопротивление материалов ч.1 2010
.pdf
|
|
dW * |
|
|
|
|
|
|
|
|
||
Из условия экстремума |
|
z |
= 0 |
получим |
уравнение |
|||||||
|
|
|||||||||||
|
|
dδ |
|
|
1 |
|
|
|
= h ( δ |
|
||
72δ2 − 40hδ+ 2h2 = 0 , корни которого будут |
δ = |
h |
и δ |
2 |
2 |
|||||||
|
||||||||||||
|
|
|
|
1 |
18 |
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
||||
не имеет смысла). Подставляя |
δ |
в выражение для W * , |
получим |
|||||||||
|
1 |
|
|
|
|
|
|
z |
|
|
|
|
Wz* = h3 19 =1,05 Wz , т.е. прочность балки увеличится на 5 %. 24 18
Рис. 3.63
3.26. Площадь пор в элементарной площадке dF = b dy , отстоящей на расстоянии y от оси z (рис. 3.63),
dFпор = ρ( y) b dy = ρh0 by dy .
Так как поры в целом на 25 % ослабляют сечение, то, следова-
|
h |
ρ |
b |
y dy = 0,25 bh , откуда ρ0 |
= 0,5 . |
тельно, Fпор = ∫dFпор = ∫ |
0 |
|
|||
F |
0 |
h |
|
|
|
Найдем положение центра тяжести сечения по формулам (3.6), (3.7):
|
|
|
|
∫ y(dF −dFпор) |
|
h |
|
ρ |
b |
|
|
|
|
|
|
Sz |
|
|
∫ y b − |
0 |
|
y dy |
4 |
|
|||
y |
= |
= |
F |
= |
0 |
|
h |
|
= |
h . |
|||
|
|
|
|
|
|
|
|
||||||
c |
|
F |
|
0,75bh |
|
|
0,75bh |
|
|
9 |
|
||
|
|
|
|
|
|
|
|
||||||
131
По формуле (3.3) момент инерции относительно оси z
|
h |
|
|
ρ |
|
|
|
5 |
|
Iz = ∫ y2 |
(dF −dFпор) = ∫ y2 |
1 |
− |
|
0 |
y |
b dy = |
|
bh3 . |
|
24 |
||||||||
F |
0 |
|
|
h |
|
|
|
||
Тогда по формуле (3.12) найдем момент инерции относительно центральной оси, параллельной оси z,
|
|
5 |
|
3 |
4 |
2 |
13 |
|
3 |
|
||
Izc |
= |
|
bh |
|
− |
|
h |
0,75bh = |
|
bh |
|
. |
24 |
|
9 |
216 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
132

Тема 4
ПЛОСКИЙ ИЗГИБ ПРЯМОГО БРУСА
Плоским называется изгиб внешними нагрузками (сосредоточенные силы, распределенные нагрузки, пары сил), лежащими в одной плоскости, проходящей через главную центральную ось поперечного сечения, являющуюся осью симметрии, и осью бруса. Брус (стержень), испытывающий изгиб, принято называть балкой.
4.1. Построение эпюр внутренних силовых факторов
4.1.1. Предварительные замечания
Простейшими балками являются консольная (рис. 4.1) и простая однопролетная (рис. 4.2). Из этих двух балок можно составить самые разнообразные балки. Так, например, на рис. 4.3 изображена двухпролетная балка с правой консолью.
Рис. 4.1 |
Рис. 4.2 |
Рис. 4.3
Опоры у балок бывают трех видов.
133

1. Шарнирно-подвижная опора. Ее схематическое изображение, наиболее корректное для осуществления кинематического анализа, представлено на рис. 4.4, а. На рис. 4.4, б показаны и другие обозначения опоры, встречающиеся в литературе, которые нами использоваться не будут. В такой опоре возникает только одна опорная реакция, перпендикулярная опорной поверхности.
Рис. 4.4 |
Рис. 4.5 |
Рис. 4.6 |
2.Шарнирно-неподвижная опора (рис. 4.5, а). На рис. 4.5, б
представлено другое, встречающееся обозначение, которое в настоящем пособии использоваться не будет.
Втакой опоре возникают две опорные реакции R и Н, препятствующие вертикальному и горизонтальному смещению прилегающего к опоре сечения балки. Опора позволяет поворот прилегающего сечения балки. R и Н являются, по сути, вертикальной и горизонтальной компонентами реакции опоры, направленной под некоторым углом.
3.Жесткая заделка (защемление) (рис. 4.6). В такой опоре воз-
никают вертикальная R, горизонтальная Н опорные реакции и опорный момент М. Такая опора лишает прилегающее сечение балки всех трех степеней свободы в плоскости.
Принятое в настоящем пособии изображение опорных устройств позволяет устанавливать степень статической неопределенности балки по формуле (1.13): S = 3K − Ш . Так, для балки рис. 4.3 число
замкнутых контуров K = 3 (I, II, III), число шарниров Ш =8 , тогда
S=1 , т.е. балка один раз статически неопределимая.
Впоперечном сечении балки, испытывающей изгиб, возникают
вслучае поперечного изгиба два внутренних силовых фактора:
Qy – поперечная (или перерезывающая) сила и M z – изгибающий
134

момент. В случае чистого изгиба Qy = 0 , M z ≠ 0 . (Принятое рас-
положение осей представлено на рис. 4.3).
Правило знаков для Qy и M z . Поперечная сила Qy положи-
тельна, если она стремится повернуть часть балки, к которой приложена по часовой стрелке, и, наоборот, отрицательна – если стремится повернуть против часовой стрелки.
Рис. 4.7 иллюстрирует это правило.
Изгибающий момент положителен, если он стремится так изогнуть балку, чтобы верхние волокна испытывали сжатие, а нижние – растяжение (рис. 4.8, а), отрицательный изгибающий момент вызывает сжатие нижних волокон и растяжение верхних
(рис. 4.8, б).
Рис. 4.7 |
Рис. 4.8 |
Это же правило можно сформулировать исходя из знака кривизны в принятой системе координат:
изгибающий момент положителен, если его действие приводит к возникновению положительной кривизны ρ1 > 0 (см. рис. 4.8, а), и,
наоборот, M z отрицателен, если ρ1 < 0 (см. рис. 4.8, б).
135
Наиболее удобно определять знак изгибающего момента по мнемоническому «правилу воды»:
изгибающий момент положителен, если «налитая вода» (штриховая линия на рис. 4.8, а) удерживается (не стекает!) на поверхности балки, в противном случае (см. рис. 4.8, б) момент M z отрицателен.
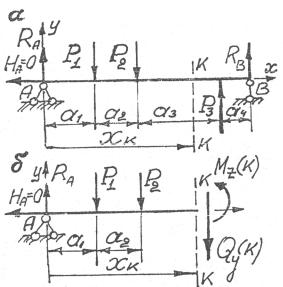
Определение величины Qy и M z в произвольном поперечном
сечении рассмотрим на примере сечения k − k для однопролетной балки (рис. 4.9, а).
Рис. 4.9
Воспользуемся методом сечений, для чего мысленно разрежем балку по сечению k − k и отбросим, например, правую часть балки. В сечении k − k (рис. 4.9, б) приложим положительные, соглас-
но принятому правилу знаков, Qy , |
M z и составим уравнения рав- |
новесия: |
|
∑y = 0 , RA − P1 − P2 −Qy (k) = 0 |
Qy (k) = RA − P1 − P2 , (4.1) |
136
n |
|
или Qy = ∑Pi ; |
(4.1а) |
1 |
|
∑mz = 0 , RA xk − P1(xk −a1) − P2 [xk −(a1 + a2 )]− M z (k) = 0 ,
где ось z, относительно которой берутся моменты, расположена в сечении k − k , а знак момента в уравнении равновесия ∑mz при-
нят положительным по часовой стрелке и отрицательным – против. Из последнего уравнения равновесия имеем:
M z (k) = RA x1 − P1(xk − a1) − P2 [xk −(a1 + a2 )], |
(4.2) |
n |
|
или M z = ∑Mi . |
(4.2а) |
1 |
|
Анализ выражений (4.1) и (4.2) позволяет сократить графическую работу при решении задачи – отказаться от изображения отсеченных частей балки.
Из (4.1), (4.1а) следует, что:
перерезывающая сила в любом поперечном сечении равна алгебраической сумме сил, перпендикулярных к оси балки (параллельно оси y) и лежащих по одну сторону от сечения.
Внешняя сила, стремящаяся повернуть часть балки по часовой стрелке по отношению к рассматриваемому сечению, дает в выражении Qy положительное слагаемое, как, например, реакцию RA в
выражении (4.1); сила, стремящаяся повернуть часть балки против часовой стрелки, дает отрицательное слагаемое, как, например, сила P1 и P2 в выражении (4.1).
Из (4.2), (4.2а) следует, что:
изгибающий момент в любом поперечном сечении равен алгебраической сумме моментов внешних сил, лежащих по одну сторону от сечения, относительно рассматриваемого сечения (относительно оси z рассматриваемого сечения).
Внешние моменты, создающие положительную кривизну балки, дают в выражении M z положительные слагаемые, как, например,
момент RA x в выражении (4.2), и, наоборот – отрицательные слагаемые, если создают отрицательную кривизну, как, например, P1(xk − a1) и P2 [xk −(a1 + a2 )] в выражении (4.2).
137
Учитывая, что приведенные правила знаков для Qy и M z не свя-
заны с направлением выбранных осей координат, совершенно безразлично какая часть балки рассматривается лежащая слева или справа от сечения, т.е. можно брать абсциссу х как от левого конца балки вправо (как на рис. 4.9, а), так и от правого конца балки влево. Важно, чтобы выражения для Qy и M z были составлены наиболее
рационально, т.е. чтобы в них входило возможно меньшее число слагаемых. Так для сечений на участке a4 и a3 балки, изображенной на рис. 4.9, а, рационально абсциссы х взять от опоры В влево.
При построении эпюр Qy и M z пользуются дифференциаль-
ными зависимостями между внешними усилиями и внутренними силовыми факторами. Дифференциальные зависимости, полученные из рассмотрения равновесия элемента балки длиной dx (рис. 4.10), на который действуют усилия с положительным знаком, имеют следующий вид:
q = |
dQy |
, |
dM |
z |
= Qy + m , |
d 2M |
z |
= q + |
dm |
. |
(4.3) |
dx |
dx |
|
dx2 |
|
dx |
||||||
|
|
|
|
|
|
|
|
В большинстве задач интенсивность распределенной моментной нагрузки m = 0 , тогда дифференциальные зависимости принимают вид:
q = |
dQy |
= tgα , Qy = |
dM |
z |
= tgβ, q = |
d 2 M |
z |
. |
(4.4) |
dx |
dx |
|
dx2 |
|
|||||
|
|
|
|
|
|
|
где α – угол между направлением оси абсцисс и касательной к графику функции Qy ; β – угол между направлением оси абсцисс и
касательной к графику функции M z .
Обращаем особое внимание, что в формулах (4.3) – (4.5) q > 0 направлено снизу вверх, т.е. совпадает с положительным направлением оси y на рис. 4.3, 4.10. Положительный угол α или β наклона касательной – это наименьший угол между направлением оси х и касательной, отложенный против часовой стрелки, и, наоборот, отрицательный – по часовой стрелке, при направлении оси х слева направо. Если ось х направлена справа налево, т.е. рассматривается правая часть балки от сечения, то в формулах (4.3) – (4.4) перед q и
138
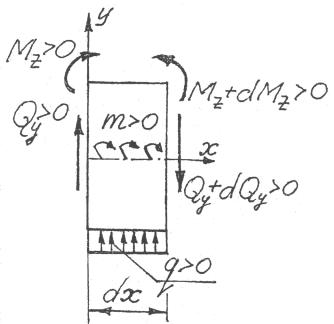
Qy нужно проставить знак минус, так как угол наклона касательной меняет знак при изменении направления оси абсцисс.
|
Рис. 4.10 |
|
Из выражения (4.4) имеем |
|
|
Qy = |
∫q dx ± Pi , |
|
|
l |
(4.5) |
|
|
|
M z = ∫Qy dx ± Mi , |
|
|
|
l |
|
где постоянные Pi и Mi – это сосредоточенные силы и моменты,
лежащие по одну (рассматриваемую) сторону от данного сечения, при этом знак перед ними проставляется согласно правилу знаков для Qy и M z . Формулами удобно пользоваться в особенности при
построении эпюр от действия распределенной нагрузки q, изменяющейся по закону степенной или тригонометрической функции.
139
4.1.2. Порядок построения эпюр Qy , M z
Рассмотрим порядок построения эпюр на ряде примеров для балок, загруженных наиболее часто встречающимися внешними силами: сосредоточенными силами, сосредоточенными моментами, распределенными по длине нагрузками.
П р и м е р 1 (рис. 4.11)
I операция. Изображение расчетной схемы. Сюда входит изо-
бражение оси балки, опорных устройств, активных сил, реакций опор с указанием выбранного их направления, размеров силовых участков.
II операция. Определение опорных реакций. Приняв за нача-
ло координат точку А, изобразим координатные оси Y и Х. Составим уравнения равновесия в виде ∑X = 0 , ∑mK = 0 , ∑mA = 0 :
∑X = 0 H A = 0 ;
∑mK = 0 , RA 8a −2qa 6a −8qa 4a + P 3a − M = 0
RA = 5qa ;
∑mA = 0 , −RK 8a − M − P 5a +8qa 4a + 2qa 2a = 0 ,
откуда RK = qa .
Отметим, что при составлении уравнений действие равномерно распределенной по длине нагрузки заменяется действием ее равнодействующей, приложенной в центре тяжести нагрузки. Так, для нагрузки интенсивностью q2 равнодействующая равна q2 2a =
=8qa и приложена посредине отрезка CD.
При составлении уравнения вида ∑mi = 0 для моментов при-
нимается правило знаков: по часовой стрелке – знак «+», против часовой стрелки – «–», или наоборот. И совершенно неуместно вспоминать о правиле знаков для изгибающих моментов, так как в этом случае имеем дело исключительно с уравнениями статики.
Для проверки правильности определения опорных реакций воспользуемся уравнениями, являющимися следствием вышеприведенных уравнений равновесия. Как известно из курса теоретической механики уравнение вида ∑Y = 0 является следствием урав-
нений ∑mA = 0 и ∑mK = 0 , как сумма проекций на ось, перпендикулярную прямой, соединяющей точки А и К. Уравнение вида
140