

Исаченко Сопротивление материалов ч.1 2010
.pdfОчевидно, что перемещение точки A (U yA ) складывается из де-
формации участка AD и DH стержня 1. Для того чтобы избежать ошибки в оценке вклада участков в перемещение точки A, воспользуемся приемом временнóго отвердевания. Пусть участок AD стержня 1 превратился в абсолютно твердое тело. Сечение D стержня переместится вниз настолько, насколько растянется участок DH, т.е.
|
Nx′ |
|
2 |
l |
|
|
3 |
||||
U yD = l1′ = |
1 |
|
|
, |
|
E1F1 |
|
||||
|
|
|
|||
на столько же (так как участок AD абсолютно твердый) переместится вниз и точка A. Очевидно, что в действительности точка A сместится вниз на меньшую величину, так как участок AD упругий
|
|
|
|
|
|
Nx′′ |
1 |
l |
|||
|
|
|
|
|
|
|
|||||
и под действием |
Nx′′ |
сожмется на |
l1′′= |
1 3 |
. |
||||||
|
|
|
|||||||||
|
1 |
|
|
|
|
E1F1 |
|||||
Таким образом, |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
U yA = AA1 = |
l1′ − |
|
|
l1′′ |
|
. |
(1.57) |
||
|
|
|
|
||||||||
Для составления дополнительного уравнения проведем вспомогательную прямую A2C1 & AC , тогда
AA −CC BB −CC |
|
|
l1′ − |
|
l1′′ |
|
|
− l3 |
|
l |
|
− |
l |
|||||
|
|
|
|
|||||||||||||||
1 |
1 |
= |
1 |
1 |
или |
|
|
|
|
|
|
|
|
= |
|
2 |
|
3 . (1.58) |
a +b |
|
|
b |
|
a +b |
|
|
|
b |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Выражая согласно закону Гука |
li |
|
через Nx |
в уравнении (1.58) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
и решая совместно с уравнениями (1.53), (1.54) и (1.55), найдем искомые усилия в стержнях.
1.3.9. Задачи «Диски»
Пусть требуется определить усилия в стержнях 1, 2, 3, поддерживающих абсолютно жесткий брус AK, весом которого по сравнению с величиной P пренебрегаем (рис. 1.17, а).
Начнем решение задачи с изображения деформированной системы, для чего мысленно заменим брус AK диском (рис. 1.17, б). В диске проводим радиусы rB и rC из точки K, вокруг которой диск
41
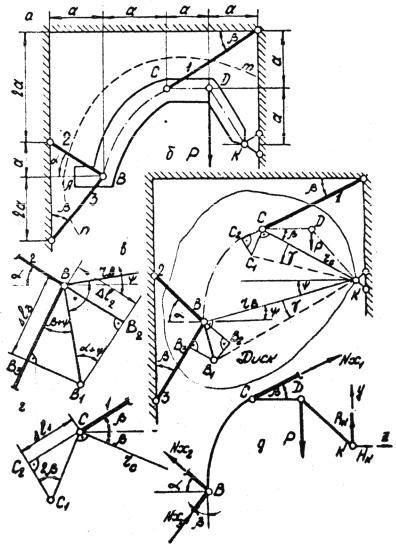
Рис. 1.17
42

поворачивается на некоторый небольшой угол γ (величина угла поворота диска определяется деформациями стержней). Любой радиус в диске, проведенный из точки K, повернется на угол γ. Новое положение точек B и C найдем, проведя BB1 BK и C1C CK –
перпендикуляры к первоначальному положению подвижных радиусов. Способом раскрепления узла строим у шарниров B и C диаграммы перемещений (рис. 1.17, в, г), откуда следует, сто стержни 1 и 2 испытывают растяжение, а стержень 3 – сжатие.
Принимая за объект равновесия брус AK и выделяя его сечением n − m по стержням, получаем силовую схему (рис. 1.17, д), для которой можно составить три уравнения равновесия, а именно:
n |
n |
n |
|
∑Yi = 0 , |
∑Zi = 0 , |
∑MK = 0 . |
(1.59) |
i=1 |
i=1 |
i=1 |
|
В них войдут пять неизвестных Nx1 , Nx2 , Nx3 , RK и HK , т.е. за-
дача два раза статически неопределимая.
Дополнительные уравнения получим из диаграммы перемеще-
ний (рис. 1.17, в)
|
|
|
BB1 |
= |
|
l2 |
= |
|
|
|
l3 |
|
, |
|
|
(1.60) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
sin(α+ ψ) |
cos(β+ ψ) |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
а также из подобия треугольников BKB1 CKC1 |
(две пары углов |
|||||||||||||||||
соответственно |
|
|
равны) |
в деформированной |
|
системе |
(см. |
|||||||||||
рис. 1.17, б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CC1 |
= |
|
BB1 |
|
или |
|
|
l1 |
|
= |
|
|
l2 |
|
, |
(1.61) |
|
|
r |
r |
|
|
cos 2βr |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
sin(α + ψ)r |
|
|||||||||
|
C |
|
|
B |
|
|
|
|
|
C |
|
|
|
|
|
B |
|
|
где
li = Nxi li . Ei Fi
Очевидно, что разд. 1.3.3 – 1.3.7 – частные случаи задач «дисков», в которых все стержни прикреплены к одному подвижному радиусу диска (отрезок прямой AK на рис. 1.11 и 1.15).
43

1.4. Интеграл Мора для определения перемещений
Использование интеграла Мора в большинстве случаев рассматривается в темах изгиба, сложного сопротивления и т.д., хотя он вполне применим для темы растяжения.
1.4.1. Решение статически определимых задач
При наличии только одного внутреннего силового фактора Nx интеграл Мора имеет вид
|
Nx |
|
|
|
|
|
|
n |
N |
i |
dx |
|
|||
δ = ∑ ∫ |
j |
|
|
j |
|
, |
(1.62) |
E j Fj |
|
||||||
j=1 l j |
|
|
|
||||
где Nx j – выражение внутреннего силового фактора на j-м участке
(стержне) от заданной нагрузки; Ni j – выражение внутреннего си-
лового фактора на j-м участке от единичной (безразмерной) силы, приложенной в i-м сечении в направлении искомого перемещения; l j и E j Fj – длина и жесткость поперечного сечения j-го участка
(стержня) соответственно.
Для стержневых систем, элементы которых испытывают только деформацию растяжения-сжатия от сосредоточенных сил, формула (1.62) имеет вид
|
Nx |
|
|
|
l j |
|
|
|
N |
i |
|
|
|||
δ = ∑ |
j |
|
|
j |
|
, |
(1.63) |
E j Fj |
|
||||||
|
|
|
|
||||
которая была предложена Максвеллом. Верещагином был предложен графоаналитический способ вычисления интеграла Мора в случае, если оси стержней прямолинейны и жесткость EF постоянна или кусочно-постоянна. Согласно способу Верещагина интеграл Мора может быть вычислен по формуле
|
|
|
iC |
|
|
n |
ωj N |
|
|||
δ = ∑ |
|
|
j |
, |
(1.64) |
|
|
|
|||
j=1 |
E j Fj |
|
|||
где ωj – площадь так называемой грузовой эпюры, т.е. эпюры Nx от действующих нагрузок; NiCj – ордината эпюры нормальной силы Nx
44
на j-м участке от единичной силы, под центром тяжести грузовой площади ωj ; единичная сила приложена в i-м сечении, перемещение
которогоопределяетсяи внаправлении искомого перемещения. Операцию в числителе формулы (1.64) принято называть «пере-
множением» эпюр.
Покажем как для стержня, изображенного на рис. 1.18, а, определяется перемещение, например, сечения K в направлении оси x с помощью способа Верещагина. Покажем именно возможность, а не как рекомендацию к рациональному решению (см. вариант 2 к данному примеру). Расчетная схема представлена на рис. 1.18, б; жесткость поперечного сечения на участке AB равна 2EF, а на участке BK – EF. Из уравнения равновесия в виде ∑x = 0 , получим, что
RA = ql . На рис. 1.18, в изображена эпюра Nx (грузовая площадь).
На рис. 1.18, г дана единичная система. В сечении K (сечение i-е перемещение которого будем определять) приложена единичная сила P° =1 по направлению x (по направлению искомого перемещения).
На рис. 1.16, в показаны положения центров тяжести C1 , C2 , C3
грузовых площадей. Отметим, что для этой задачи определять положения центров тяжести нет смысла, так как где бы они не нахо-
дились, |
|
ординаты |
на |
|
эпюре |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
N |
x |
|
везде |
|
|
одинаковы, т.е. |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
N |
C |
= NC |
2 |
= NC =1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
По формуле (1.64) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
U |
|
= |
1 |
|
|
|
+ |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
K |
ω N |
C |
(ω N |
C |
|
+ ω N |
C |
|
) = |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2EF |
1 |
|
|
|
EF |
|
2 |
|
|
|
|
3 |
|
|
2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 ql2 |
|
||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
3 |
|
ql |
2 |
|
|
|
|
1 |
5 |
ql |
2 |
1 +3ql |
2 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
1 |
+ |
|
|
|
|
|
|
|
1 |
= |
|
|
|
|
. |
||||||||||||
|
|
|
|
|
|
|
2EF |
2 |
|
|
|
|
2 |
|
|
|
4 EF |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Знак «+» в результате указывает, что направление перемещения сечения K совпадает с направлением единичной силы P° =1 .
Вариант 2 решения. Исходя из принципа суперпозиции (принципа независимости действия сил) и учитывая формулы (1.8) и (1.9) определим UK :
UK = − |
|
ql2 |
|
(ql) l |
|
ql2 |
|
P l |
|
P 2l |
|
25 ql2 |
|||
|
|
− |
|
− |
|
+ |
|
+ |
|
= |
|
|
|
. |
|
2 |
2EF |
2EF |
2EF |
2EF |
EF |
|
|
||||||||
|
|
|
|
|
|
4 EF |
|||||||||
|
|
|
|
|
|
45 |
|
|
|
|
|
|
|
|
|
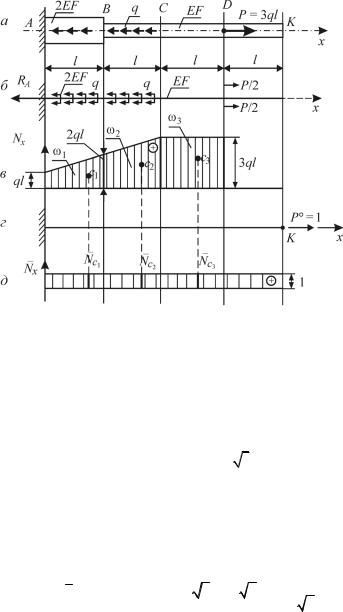
Рис. 1.18
Откуда делаем вывод, что при решении задачи нужно выбирать менее трудоемкий и более компактный способ решения.
Для стержневой системы в виде кронштейна (рис. 1.19, а) необходимоопределить вертикальноеи горизонтальноеперемещения узлаB.
Вариант 1. При решении воспользуемся способом Верещагина. Из рассмотрения равновесия узла B (рис. 1.19, б) в виде уравне-
ний ∑Z = 0 , ∑Y = 0 получим, что Nx = |
3P , Nx |
2 |
= 2P . Эпюры |
1 |
|
|
Nx (грузовые площади) представлены на рис. 1.19, в. Для опреде-
ления вертикального перемещения узла B изобразим единичную систему (рис. 1.19, г) с силой P° =1 , приложенной к узлу B по вер-
|
|
|
|
|
|
представлены на рис. 1.19, д. |
|
||||||||||
тикали; эпюры N |
x |
|
|||||||||||||||
По способу Верещагина |
|
|
|
|
|
|
|
|
|||||||||
δB = |
1 |
(ω1N |
C |
|
|
|
|
|
)= |
1 |
|
3P l |
3 + 2P |
2 |
l 2 = |
||
|
+ ω2 N |
C |
2 |
||||||||||||||
|
|
|
|
||||||||||||||
|
EF |
1 |
|
|
|
|
EF |
|
3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
46 |
|
|
|
|
|
|
|
|
|
8 |
|
Pl |
. |
|
= |
3 |
+ |
|
|
|
||
3 |
EF |
||||||
|
|
|
|
|
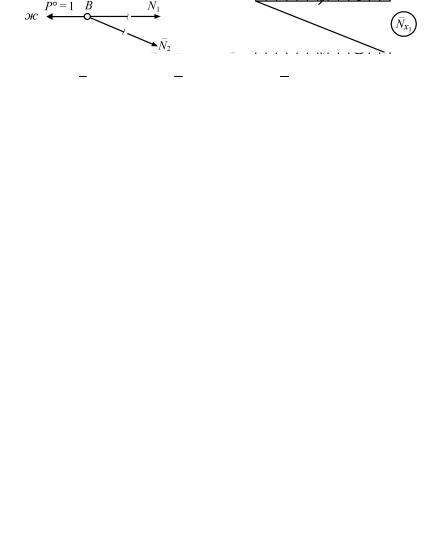
Для определения горизонтального перемещения изобразим единичную систему, загруженную силой P° =1 по горизонтали (рис. 1.19, е). Из рассмотрения равновесия узла B (рис. 1.19, ж) по-
лучим, что Nx′1 = P° =1 , а Nx2 = 0 . Эпюра Nx для этой единичной системы представлена на рис. 1.19, з.
Рис. 1.19
47
δГ = EF1 ω1NC′1 = EF3Pl .
Вариант 2. Из условий равновесия узла B имеем, что
Nx |
= |
3P , Nx |
2 |
= 2P . Тогда |
|
|
|
|
|
|
|
|
|
|||
1 |
|
Nx l1 |
|
|
|
|
|
Nx |
l2 |
|
|
|
|
|
||
|
|
|
|
|
3P l |
|
|
|
|
2P l |
|
4Pl |
|
|||
|
l |
= |
1 |
= |
|
, l |
2 |
= |
|
2 |
= |
|
= |
|
. |
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
EF |
|
|
EF |
|
|
EF |
|
cos30°EF |
|
3EF |
|
||
|
|
|
|
|
|
|
|
|
|
|
||||||
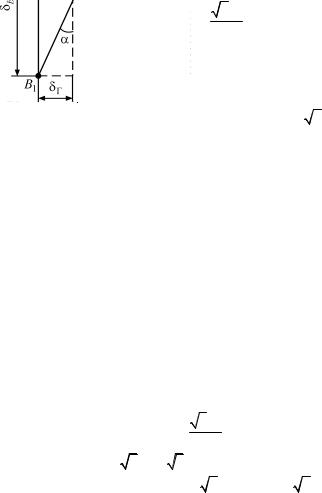
Изобразим деформационную систему и построим диаграмму перемещений (рис. 1.20).
Рис. 1.20
Из диаграммы перемещений имеем, что
δГ = l1 = EF3Pl ;
|
l |
|
l |
|
3P l |
3 |
|
4Pl 2 |
|
|
|
8 |
Pl |
|
|
δB = |
1 |
+ |
2 |
= |
|
|
+ |
|
= |
3 |
+ |
|
|
|
. |
tgα |
sin α |
EF 1 |
|
|
|
EF |
|||||||||
|
|
|
|
|
3EF 1 |
|
|
3 |
|
||||||
1.4.2. Статически неопределенные многостержневые системы при растяжении-сжатии (канонические уравнения метода сил)
План решения состоит из следующих операций.
1.Отбрасывая «лишние» связи, стоим основную систему.
2.Загрузив основную систему всеми внешними нагрузками, в том числе «лишними» неизвестными, которые заменили «лишние»
48

связи, получаем эквивалентную систему. При этом «лишние» неизвестные переходят в категорию внешних активных сил.
3. Записываем канонические уравнения метода сил.
Для n раз статически неопределимой системы уравнения имеют вид:
δ11X1 + δ12 X2 +... + δ1n Xn + |
1p = 0 ; |
(1.65) |
δ21X1 + δ22 X2 +... + δ2n Xn + |
2 p = 0 ; |
(1.66) |
… |
|
|
δn1X1 + δn2 X2 + δnn Xn + np = 0 .
Уравнение (1.65) представляет собой перемещение точки приложения силы X1 в направлении этой силы. Аналогично уравнение
(1.66) – перемещение точки приложения силы X2 в направлении этой силы и т.д.
В уравнениях: ip – грузовое перемещение только от заданной
внешней нагрузки в эквивалентной системе, определенной в точке приложения и в направлении неизвестной силы Xi ; δii – главное
единичное перемещение (главные коэффициенты канонического уравнения), которое представляет собой перемещение i-й точки от единичной силы в направлении Xi силы; δij – побочные единич-
ные перемещения (побочные коэффициенты канонического уравнения), которые представляют собой перемещения i-й точки (точки
приложения силы Xi |
и в направлении Xi от единичной силы, на- |
правленной так же, как и X j . Отметим, что δij = δji . |
|
Для определения |
ip , δii , δij необходимо построить эпюры Nx |
от только заданной нагрузки для эквивалентной системы, т.е. построить грузовые площади; построить эпюры Nx от единичных
усилий для основной системы, загруженной только единичными силами, приложенными в (i, j) точке по направлениям i, j, …, n. Далее следует произвести, например, по способу Верещагина пере-
множение эпюр, т.е. |
для получения ip перемножить грузовую |
|||||||
эпюру Nx с эпюрой |
|
|
|
от i-й единичной силы; для получения |
||||
N |
x |
|||||||
|
|
|
i |
|
|
|
|
|
δii – перемножить эпюру |
|
|
|
|
|
|||
N |
x от X1 =1 саму на себя; а δij полу- |
|||||||
|
|
|
|
|
|
i |
||
|
|
|
|
49 |
|
|
||

|
|
|
|
|
|
|
|
|
. Подчеркнем, что все |
|
чим, перемножив эпюру N |
x |
на эпюру Nx |
j |
|||||||
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
относятся к эпюрам от единичных усилий. При пере- |
|||||||
эпюры N |
x |
|||||||||
|
|
i |
|
|
|
|
|
|||
множении следует учитывать знаки эпюр.
В самом общем виде канонические уравнения записываются так
[15]:
|
|
n |
|
|
|
|
|
|
|
|
|
|
||
|
|
∑δjk Xk + |
jp = 0 , |
j =1, 2, 3, ..., n . |
(1.67) |
|||||||||
|
|
k=1 |
|
|
|
|
T , то канонические |
|||||||
Если в системе температура изменяется на |
||||||||||||||
уравнения принимают вид |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑δjk Xk + |
jT = 0 , |
|
(1.68) |
|||||||
|
|
|
|
k=1 |
|
|
|
|
|
|
|
|
|
|
где |
jT |
– температурное перемещение в основной системе в на- |
||||||||||||
правлении X j , и может быть вычислено по формуле: |
|
|
|
|
|
|||||||||
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
jT |
= ∑αi |
Ti N |
jjli , |
|
(1.69) |
|||||
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
где |
αi |
– температурный коэффициент линейного расширения на |
||||||||||||
j-м участке (в i-м стержне); |
|
|
|
|
jj – |
|||||||||
Ti – изменение температуры; N |
||||||||||||||
|
|
x от действия |
|
|
|
|
|
|||||||
нормальная сила N |
единичной |
силы |
X j = P° =1 , |
|||||||||||
приложенной в направлении действия «лишней» неизвестной; li – длина участка, на котором происходит изменение температуры.
При наличии монтажного зазора j в направлении X j каноническое уравнение запишется:
n |
|
∑δjk Xk = − j . |
(1.70) |
k=1
Пример решения с использованием канонических уравнений показан в задаче 1.14, в которой можно убедиться, что решения с помощью канонического уравнения менее трудоемко. Более подробно применение канонических уравнений метода сил будет рассмотрено при решении рамных систем.
50