

Исаченко Сопротивление материалов ч.1 2010
.pdfА. Из диаграммы АА |
= |
|
l1 |
= |
l2 |
; l = |
h |
, l = |
h |
, откуда |
1 |
|
cosβ |
cos α |
1 |
sin β |
2 |
sin α |
|
||
sin 2α = sin 2β α = 90 −β ( α =β не имеет смысла). |
|
|
||||||||
1.10. 1. Определим |
тип |
задачи |
по |
формуле |
(1.13): |
|||||
S = 3K − Ш =1 , так как K = 4 , |
Ш =11 , т.е. задача один раз стати- |
|||||||||
чески неопределимая. |
|
|
|
|
|
|
|
|
|
|
2. Выделяем объекты равновесия (рис. 1.50, 1.51) и составляем для них уравнения равновесия в виде ∑y = 0 , т.е. получаем два
уравнения.
3. Изобразим деформационную схему (рис. 1.52). На схеме А1′ –
положение шарнира |
|
А после сборки (после присоединения к А1 ). |
|||||||
Отрезок BB1 = uB |
– |
перемещение шарнира В. Дополнительное |
|||||||
уравнение будет иметь вид: |
|
|
|
l2 |
|
|
|||
δ = l +u |
A |
= l + (u |
B |
+ l ) = |
l + |
+ |
l , |
||
|
|||||||||
1 |
1 |
3 |
1 |
sin ϕ |
3 |
||||
|
|
|
|
|
|
|
|||
где li = NEFxi li .
4. Решая совместно уравнения п.2 и 3, найдем монтажные уси-
лия Nxi , а напряжения по выражению σxi = NFxi .
Рис. 1.51 Рис. 1.52
1.11. 1. Определяем тип задачи по формуле (1.13): S = 3K − Ш =1 (так как K = 2 , Ш = 5 ) – задача один раз статически неопределимая.
61
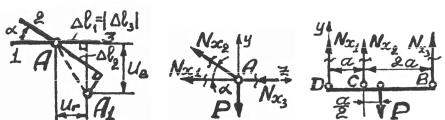
2. Построим диаграмму перемещений (рис. 1.53). А1 – новое положение узла А. Запишем дополнительные уравнения: l1 =
|
|
|
|
|
|
l |
|
l |
|
Nx li |
|
= |
|
l |
|
, АА |
= |
1 |
= |
2 |
, где l = |
i |
. |
|
|
|
|
|
|||||||
|
|
3 |
|
1 |
|
sin γ |
|
sin (α + γ) |
i |
EF |
|
|
|
|
|
|
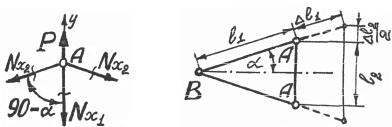
3. Выделим объект равновесия – узел А (рис. 1.54) и направим усилия в строгом соответствии с деформационной схемой (см. рис. 1.53); составим уравнение равновесия в виде ∑y = 0 , ∑z = 0 .
4. Совместное решение уравнений п.2 и 3 дадут Nx1, Nx2 , Nx3 , γ .
5. Определим uгор = l1 , uвер = |
l1 / tgγ . |
|
|
1.12. 1. Из условия задачи l1 = |
l2 |
Nx |
= Nx . |
|
|
1 |
2 |
2. Изобразим силовую схему (рис. 1.55). Уравнения равновесия
для нее ∑y = 0 , ∑mc = 0 , откуда Nx = Nx |
2 |
= 0,3P , |
1 |
|
Nx3 = 0, 4P > Nx1 .
3. Величина, на которую нужно стяжной гайкой поднять сече-
ние |
B стержня 3, будет равна δ = |
l3 − |
l1 = |
l |
(Nx3 − Nx1 )= |
||
EF |
|||||||
|
Pl |
|
|
|
|
||
= 0,1 |
. |
|
|
|
|
||
|
|
|
|
|
|||
|
EF |
|
|
|
|
||
Рис. 1.53 |
Рис. 1.54 |
Рис. 1.55 |
1.13. 1. Введем обозначения: l1 = l , l2 = 2l , sin α = 2l sin πn , где n – число сторон многоугольника.
62
2. Определим тип задачи по формуле (1.13): S = 3K − Ш =1 , так как K =8 , Ш = (8 −1)+(3 −1)8 = 23 , т.е. задача один раз статически неопределимая.
3.Выделим объект равновесия – узел А (рис. 1.56) и составим уравнение равновесия в виде ∑y = 0 : P − Nx1 − 2Nx2 sin πn = 0 .
4.Построим диаграмму перемещений (рис. 1.57) и составим до-
|
|
|
l |
2 |
|
|
|
π |
|
|
|
Nx |
li |
|
|
|
|
полнительное уравнение: |
|
= |
l |
sin |
|
, |
где |
l = |
1 |
|
, откуда |
||||||
|
|
|
|
|
|
||||||||||||
|
|
2 |
|
|
1 |
|
n |
|
|
i |
EF |
|
|
|
|||
|
|
|
|
|
|
|
|
|
P |
|
|
||||||
Nx |
= Nx |
; тогда из уравнения равновесия |
Nx |
= Nx |
= |
|
|
|
. |
||||||||
|
|
|
π |
||||||||||||||
1 |
|
2 |
|
|
|
|
|
|
|
1 |
2 |
1 |
+ 2sin |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
5. Такой же результат можно получить, воспользовавшись феноменологическим приемом:
|
|
l1 + |
l1 |
= |
l1 |
, |
или |
l1 + |
l1 |
= |
l2 + |
l2 |
, |
||||||||
|
|
l + |
|
l |
l |
|
|
|
|
|
|
||||||||||
|
|
l |
2 |
|
|
|
|
|
|
|
|
|
|
l |
2 |
|
|
||||
|
2 |
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Nx |
|
|
Nx |
|
||||
|
или |
1+ ε =1+ ε |
2 |
, |
или |
|
1 |
= |
|
|
2 |
|
, |
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
EF |
|
|
|
EF |
|
|||||
откуда Nx |
= Nx . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.56 |
Рис. 1.57 |
1.14.Вариант 1. Из равновесия узла C (рис. 1.58, а)
∑Z = 0 ; N3 sin β− N4 sin ϕ = 0 ;
63
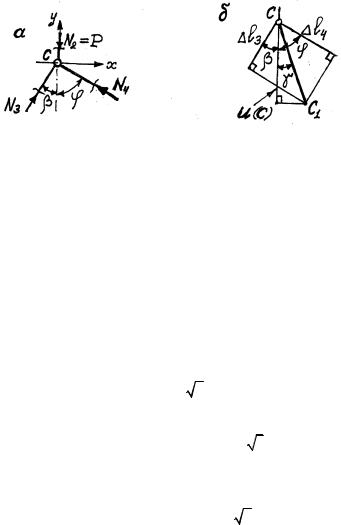
∑Y = 0 ; −P + N3 cosβ+ N4 cos ϕ = 0
получаем N3 = P3 3 , N4 = P2 .
Рис. 1.58
Из диаграммы перемещений (рис. 1.58, б) имеем:
CC1 |
= |
U (C) |
= |
|
l3 |
|
= |
l4 |
, |
|
|||
|
cos γ |
cos(β+ γ) |
cos(ϕ− γ) |
|
|||||||||
|
|
|
|
|
|
|
|
||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
tgγ = |
U (C)cosβ− l3 |
|
= |
l4 −U (C)cos ϕ |
. |
||||||||
|
|
|
|||||||||||
|
|
|
|
U (C)sin β |
|
|
|
U (C)sin ϕ |
|
|
|||
С учетом значений синусов и косинусов, указанных в условии задачи углов, получаем из последнего уравнения
2 U (C) = l3 3 + l4
или
|
|
|
|
2 |
α |
t (l |
|
+ l |
2 |
) − |
|
N2 |
l2 |
|
= |
N3 l3 |
3 |
+ |
N4 l4 |
, |
(*) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
E |
F |
|
E F |
|
|
|
E F |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
где |
l |
=l |
AB |
= 3 l , |
l |
= l |
BC |
= |
l |
, |
l |
= l |
= |
4l |
, l |
= l = 4l |
(см. |
|||||||||||||
|
|
|
||||||||||||||||||||||||||||
|
1 |
|
2 |
2 |
|
|
2 |
|
3 |
CD |
3 |
4 |
CK |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
рис. 1.34 на с.54). Тогда из (*) получим |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
t = |
|
1,6 P |
= |
|
|
|
|
|
|
1,6 50000 |
|
|
|
= 20° (нагрев). |
|
|||||||||||||
|
|
|
α E F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
12,5 10−6 2 1011 16 10−4 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
64 |
|
|
|
|
|
|
|
|
|
|
|
|
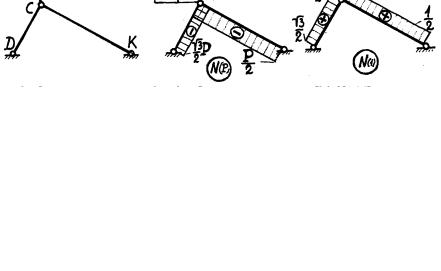
Вариант 2. Воспользуемся методом сил. Система один раз статически неопределимая. Выберем основную систему путем замены неподвижного шарнира A на подвижную шарнирную опору, дающую возможность перемещаться концу A верхнего стержня в вертикальном направлении. Тогда эквивалентная система будет иметь вид, показанный на рис. 1.59, а. Запишем каноническое уравнение
δ11X1 + 1P + 1t = 0 . |
|
Так как в конечном состоянии системы X1 = 0 , |
то это уравнение |
примет вид |
|
1P + 1t = 0 , |
|
где 1P и 1t – перемещения в направлении X1 |
для основной сис- |
темы соответственно при нагружении силой P и нагреве стержня |
|
AC. Для их определения строим эпюры нормальных сил при на- |
|
гружении основной системы единичной силой (рис. 1.59, в) и внешней нагрузкой P (рис. 1.59, б). Находим значения коэффициентов:
|
= − |
1 |
|
P |
l |
1 |
+ |
3 |
P |
4 |
l |
3 |
+ |
P |
4l |
1 |
|
= −3,2 |
Pl |
; |
1P |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
2 |
|
|
2 |
|
3 |
|
2 |
|
2 |
|
2 |
|
|
EF |
|
|
|
|
EF |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
1t = 2αl |
t . |
|
|
|
|
|
|
|
|
||
Рис. 1.59
65

Подставив |
1P |
и 1t |
в каноническое уравнение и решив его от- |
|||||
носительно |
|
t , получим |
|
|
||||
t = |
1,6P |
= |
|
1,6 50 103 |
= 20 |
° (нагрев). |
||
αEF |
|
10−7 2 1011 16 10−4 |
||||||
|
|
1,25 |
|
|
||||
1.15. Очевидно, что сечение посредине длины l не перемещает-
|
l |
|
|
l |
|
||
ся, т.е. |
ux |
|
|
= 0 . Тогда сечение посредине |
|
также не перемеща- |
|
2 |
2 |
||||||
|
|
|
|
|
|||
ется, т.е. ux |
l |
= 0 и т.д. |
|
|
|
|
|
|
|
|
|||
4 |
|
|
|
|
|
|
1.16. 1. Из условия |
= |
Pa |
(рис. 1.60, а) получаем P = |
EF . |
||
|
||||||
|
|
|
|
EF |
a |
|
2. После приварки сечения K к B − B и разгрузки (равносильно |
||||||
приложению силы P |
в |
противоположном направлении) будем |
||||
иметь один раз статически |
неопределимую систему (рис. 1.60, б), |
||||||
решение которой даёт R |
A |
= |
2 |
P ; |
R = 1 |
P . |
|
|
|
3 |
|
B |
3 |
|
|
|
|
|
|
|
|
||
3.Сложив обе эпюры, получили остаточные усилия (рис. 1.60, в)
иσx = NFx (остаточные).
Рис. 1.60
66

1.17. 1. Обозначим через |
|
Н |
|
|
q = F γ |
|
|
– интенсивность равно- |
|
|
||||
|
|
м |
|
|
мерно распределенной нагрузки вдоль оси стержня (рис. 1.61, а).
|
|
|
Рис. 1.61 |
|
|
|
|
|
|||
2. Пусть x0 |
– координата сечения, отделяющая зону сжатия от |
||||||||||
зоны растяжения. x 0 определяется из равенства lсж = |
lраст , т.е. |
||||||||||
|
|
|
q x2 |
|
q(l − x |
)2 |
|
откуда x0 = l (2 − 2 ). |
|||
согласно формуле (1.9) |
0 |
|
= |
|
0 |
|
, |
||||
2 Ec F |
2Ep F |
|
|||||||||
|
|
Nx (σx ) |
|
|
|
|
|
||||
Тогда |
эпюра |
будет |
иметь |
вид |
(рис. 1.61, б), откуда |
||||||
RA = q(l − x0 ), |
RB = q x0 . Значения нормальных сил в области сжа- |
||||||||||
тия |
Nx сж = RB −qx , |
в |
области |
|
растяжения |
Nx раст = |
|||||
= RA − q(l − x).
3. Перемещения по направлению оси x в области сжатия
x |
Nx сж dx |
|
R x |
|
q x2 |
|
|
|
||
ux сж = ∫ |
|
= |
B |
|
− |
|
, |
в |
области |
растяжения |
E F |
E |
F |
2E F |
|||||||
0 |
c |
|
c |
|
|
c |
|
|
|
|
|
l−x |
Nx раст dx |
|
RA (l − x) |
|
q(l − x)2 |
||||
ux раст = ∫ |
|
|
|
= |
|
|
− |
|
. При x = x 0 имеем |
|
E |
F |
E F |
2E F |
|||||||
|
0 |
p |
|
|
|
p |
|
p |
|
|
ux |
сж = ux |
раст = |
|
γ l2 |
( |
2 −1)2 |
|
|
|
|
|
|
|
|
. |
|
|
|
|||
|
|
|
|
|
|
|
||||
0 |
0 |
|
|
|
2Ep |
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
67 |
|
|
Тема 2
АНАЛИЗ НАПРЯЖЕННОГО СОСТОЯНИЯ. ОБОБЩЕННЫЙ ЗАКОН ГУКА
2.1. Основные положения
Определение главных напряжений осуществляется с использованием характеристического уравнения, называемого иногда «вековым уравнением»:
|
|
|
|
|
σ3 −σ2 II + σIII |
− IIII |
= 0 , |
|
|
|
|
(2.1) |
|||||||||||||
где инварианты напряженного состояния: |
|
|
|
|
|
|
|
||||||||||||||||||
II |
|
= σx + σy + σz |
= σ1 + σ2 + σ3 = const , |
(2.2) |
|||||||||||||||||||||
III |
= |
|
σx |
τyx |
|
+ |
|
σx |
τzx |
|
+ |
|
σy |
τzy |
|
= |
|
||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
τ |
xy |
σ |
y |
|
|
τ |
xz |
σ |
z |
|
|
τ |
yz |
σ |
z |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
= σ1σ2 + σ2σ3 + σ3σ1 = const, |
|
|
|
(2.3) |
|||||||||||||||||
|
|
|
σx |
|
τyx |
|
|
τzx |
|
|
σ |
|
|
0 |
|
|
0 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
IIII = |
|
τxy |
σy |
|
|
τzy |
|
= |
0 |
|
|
|
σ2 |
|
0 |
= const . |
(2.4) |
||||||||
|
|
τxz |
τyz |
|
|
σz |
|
|
0 |
|
|
0 |
|
|
σ3 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Корни уравнения (2.1) являются главными напряжениями σi , σj , σk , при этом наибольшему по алгебраической величине присваивается индекс 1 ( σ1 ), наименьшему по алгебраической величине – индекс 3 ( σ3 ), промежуточному – индекс 2 ( σ2 ).
Индексы у напряжений, действующих на произвольных площадках, имеют следующий смысл: при нормальном напряжении – обозначение нормали к площадке, на которой действует напряже-
ние. Так, σx – напряжение, действующее на площадке, нормаль к которой – ось x (параллельна оси x ); индексы при касательном
68
напряжении, например, τxy : первый индекс – это так называемый
адрес, т.е. площадка, на которой действует напряжение, имеет нормалью ось x (или параллельна оси x ); второй индекс обозначает ось, по направлению которой действует касательное напряжение.
В табл. 2.1 приведены виды напряженных состояний.
|
|
|
|
|
Таблица 2.1 |
|
|
|
|
|
|
||
Вид напряженного со- |
Значение главных |
Значение инвариантов |
||||
стояния |
напряжений |
|
II |
III |
|
IIII |
Линейное (одноосное) |
σi ≠ 0, σj = σk = 0 |
≠ 0 |
0 |
|
0 |
|
Плоское (двухосное) |
σi ≠ 0, σj ≠ 0, σk |
= 0 |
Любое |
≠ 0 |
|
0 |
Объемное (трехосное) |
σi ≠ 0, σj ≠ 0, σk |
≠ 0 |
Любое |
Любое |
|
≠ 0 |
Определение направления главных напряжений получаем из решения системы уравнений (2.5) относительно направляющих косинусов l, m, n:
|
|
|
|
|
|
(σx −σ)l + τy x m + τ zx n = 0; |
|
|
|
τx yl +(σy −σ)m + τzy n = 0; |
(2.5) |
|
||
|
τx zl + τy z m +(σz −σ)n = 0; |
|
|
|
|
|
|
|
l2 + m2 + n2 =1.
При использовании в задачах формул (2.1)÷(2.5) следует придерживаться следующего правила знаков для напряжений. Нормальные напряжения положительны, если они направлены от площадки. На площадке, внешняя нормаль к которой направлена в положительном (или отрицательном) направлении соответствующей оси, τ считается положительным, если оно также направлено в положительном (или отрицательном) направлении соответствующей оси.
Определение напряжений на наклонных площадках в случае плоского напряженного состояния, если исходные площадки произвольные, производится по формулам (2.6); (2.6а); (2.7); (2.10) при выполнении следующих правил знаков:
• нормальное напряжение положительно, если оно направлено от площадки, т.е. вызывает растяжение, и отрицательно, если направлено к площадке;
69
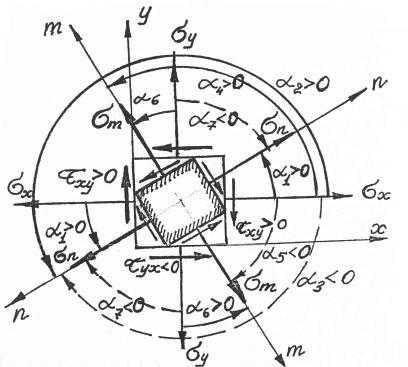
• касательное напряжение положительно, если оно стремится повернуть элемент по часовой стрелке, и отрицательно, если – против часовой; угол α положителен, если направлен против часовой стрелки, и отрицателен – по часовой стрелке (рис. 2.1).
|
|
|
Рис. 2.1 |
|
||
σn = |
σx +σy |
+ |
σx −σy |
cos 2α −τxy sin 2α, |
(2.6) |
|
2 |
2 |
|||||
|
|
|
|
|||
где α , с учетом вышеприведенного правила знаков, отсчитывается от того исходного нормального напряжения, которое стоит на первом месте в членах формулы; так, для определения σn можно
взять |
угол |
α = α1 = (σx , n) > 0 , |
α = α2 =180 + α1 > 0 , |
α = α3 = −(180 −α1 ) < 0 ; для определения |
σm можно взять угол |
||
70