

Исаченко Сопротивление материалов ч.1 2010
.pdf
|
1.5. Задачи |
Задача |
1.1. При креплении швеллера к абсолютно жёсткой |
(EF = ∞) |
плите, в болте, при затяжке гайкой, вызвано растяги- |
вающие усилие Nx = N0 . Как будет меняться усилие в болте, если швеллер будет нагружаться силой 0 ≤ P ≤ 4N0 (рис. 1.21)? Построить график Nx = f (P).
Рис. 1.21 |
Рис. 1.22 |
|
|
Задача 1.2. Доказать, что работа силы P (при статическом на- |
|||
гружении от 0 до |
P ) численно равна потенциальной энергии де- |
||
формации стержневой системы (рис. 1.22). Дано |
P, l, E, F . Де- |
||
формацией и весом балок I, II пренебречь. |
|
|
|
Задача 1.3. Построить эпюру Nx с учётом |
массы стержня |
||
(рис. 1.23). Дано P, l, m – масса стержня. |
|
|
|
Задача 1.4. Абсолютно жесткий (EF = ∞) брус |
AB подвешен |
||
на упругом тросе, |
пропущенном через блоки C и |
D (рис. 1.24). |
|
Дано P, EF для троса, a . Определить положение сечения троса,
которое останется неподвижным при действии силы P . Силами трения, размерами блоков и весом бруса AB пренебречь.
51

Рис. 1.23 |
Рис. 1.24 |
|
|
Задача 1.5. Брус |
AB |
||
(рис. |
1.25) |
абсолютно |
|
жесткий, весом которо- |
|||
го пренебрегаем. Стерж- |
|||
ни |
1 и |
2 упругие |
|
( EF = 2 104 кН), l =1 м. |
|||
Определить |
силу |
P , |
|
|
если при её приложении |
|
узел B переместился по |
|
вертикали на 0,08 см. |
Рис. 1.25 |
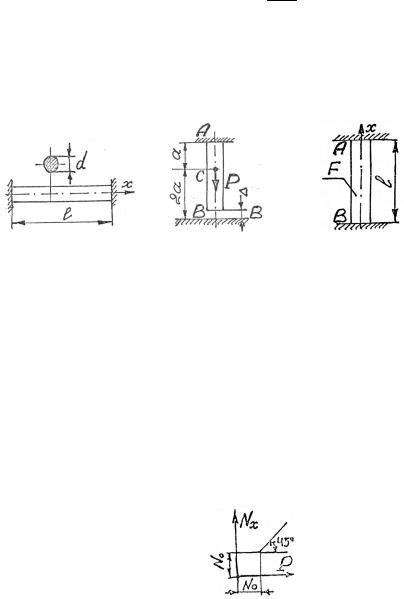
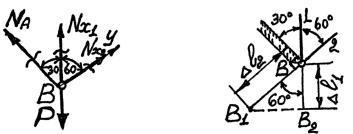
Задача 1.6. Стержень |
|
круглого поперечного се- |
чения(рис. 1.26, а) имеет по любому диаметру поперечного сечения переменный модуль
E (ρ) (эпюра приведена на рис. 1.26, б). Построить эпюру нор-
мальных напряжений при справедливости гипотезы плоских сечений. P и r заданы.
Рис. 1.26
52
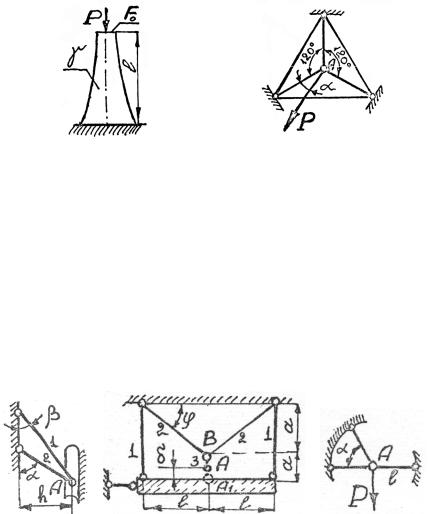
Задача 1.7. Колонна сжимается под действием силы P , равномерно распределённой по верхнему сечению, и собственного веса (рис. 1.27). Требуется подобрать закон изменения площади поперечного сечения колонны из условия равнопрочности. P, γ, [σ] заданы.
Рис. 1.27 |
Рис. 1.28 |
|
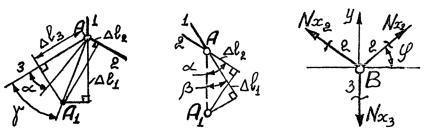
Задача 1.8. Доказать, что в стержневой системе (рис. 1.28) узел А перемещается в направлении силы P , если жесткости всех стержней одинаковы.
Задача 1.9. Шарнир А может перемещаться по желобу свободно, но только по вертикали (рис. 1.29). Жесткости стержней одинаковы. При каком соотношении α и β в стержнях не возникают
напряжения при их нагревании на t .
Задача 1.10. Абсолютно жесткая балка, весом которой пренебрегаем, подвешена на упругих стержнях одинаковой жесткости(рис. 1.30). Определить монтажные напряжения, возникающие в стержнях при сборке– при присоединенииточечногошарнира А к А1 ( δ << a ).
Рис. 1.29 |
Рис. 1.30 |
Рис. 1.31 |
53

Задача 1.11. В системе (рис. 1.31) все три стержня имеют одинаковую длину и жесткость. Найти горизонтальное и вертикальное перемещение узла А.
Задача 1.12. На какую величину δ надо укоротить правый стержень, состоящий из двух частей, с помощью стяжной гайки А, чтобы абсолютно жёсткий брус весом P , подвешенный на трех одинаковых стержнях, оставался бы горизонтальным (рис. 1.32)? Известны P, l, α и EF стержней.
Рис. 1.32 |
Рис. 1.33 |
Задача 1.13. Определить напряжения в стержнях плоской фермы в виде правильного многоугольника, загруженной в узлах радиальными силами P (рис. 1.33). Жесткость всех стержней одинакова. Длина каждого радиального стержня l .
Рис. 1.34
Задача 1.14. Для стержневой системы (рис. 1.34), линейные и угловые размеры которой известны, определить, как и насколько градусов нужно изменить температуру стержня AC, чтобы на участке AB напряжения стали бы равны нулю. Устойчивость стержней
54
считать обеспеченной. Известно: P = 50 кН, для всех стержней
E = 2 105 МПа, F =16 см2 , α =12,5 10−6 1 .
град
Задача 1.15. Стержень постоянного поперечного сечения жестко заделан правым и левым крайними сечениями (рис. 1.35). Стержень равномерно нагревается по всей длине на t . Показать без
вычислений, что в стержне не возникают перемещения сечений по направлению оси x .
Рис. 1.35 |
Рис. 1.36 |
Рис. 1.37 |
Задача 1.16. Упругий стержень AK жесткостью EF жестко за- |
||
делан верхним сечением. Между нижним сечением |
K и поверхно- |
|
стью B − B имеется зазор |
<< a (рис. 1.36). Стержень в сечении C |
|
статически нагружается силой до величины P , при достижении которой сечение K коснется поверхности B − B . В момент касания сечение K приваривается к поверхности B − B , после чего стержень разгружают. Определить остаточные напряжения в стержне.
Задача 1.17. Для стержня AB , защемлённого крайними сечениями (рис. 1.37), построить эпюры напряжений σx по длине и пе-
ремещений ux сечений, вызванных действием собственного веса.
γ, F, l, Eсж = 2Eраст известны.
1.6.Решения, указания, ответы
1.1. График имеет вид:
55
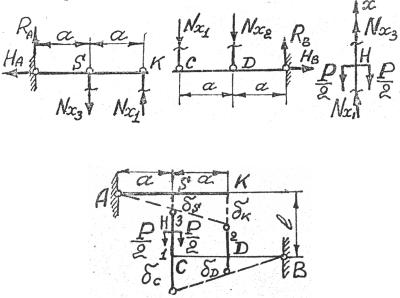
1.2. 1. Определяем тип задачи по формуле (1.13): S = 3 2 −6 = 0 , так как K = 2 , Ш = 6 , т.е. задача статически определимая.
2.Выделяем объекты равновесия (рис. 1.38).
3.Составляем уравнения равновесия для первой, второй и третьей
схемы рис. 1.38: |
∑mA = 0 ; ∑mB = 0 ; |
∑x = 0 ; |
откуда |
|
Nx |
= −1 P |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(нужно поменять направление Nx |
на обратное, т.е. в стержне имеет |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
месторастяжение), Nx |
|
= 2 P (сжатие) , |
Nx |
= |
|
4 P (растяжение) . |
|
||||||||||||||||
|
|
|
|
2 |
|
3 |
|
|
|
|
3 |
|
3 |
|
|
|
|
|
|
|
|
||
4. Определяем перемещения и деформации (рис. 1.39). δC > δS , так |
|||||||||||||||||||||||
какстержни1 и3 растягиваются, т.е. δC −δS = |
|
l1 + |
l3 ; |
δK > δD , так |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Nx |
li |
|
|
|
как стержень 2 сжимается, |
т.е. δ |
K |
−δ |
D |
= |
|
l |
|
. |
|
l |
= |
|
i |
|
. С уче- |
|||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
i |
|
EF |
|
|
||||
том, что δK = |
2a |
, |
δC |
= |
2a |
, найдем, что δS = |
13 |
Pl |
. |
|
|
||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
δS |
a |
|
δD |
|
|
a |
|
|
|
|
|
|
|
|
9 EF |
|
|
|
|
|
|
||
Рис. 1.38
Рис. 1.39
56
5. Определяем работу силы P и потенциальную энергию де-
формации. |
Работа |
A = |
1 |
P u |
н |
= |
1 |
P (δ |
S |
+ |
l ) = |
25 P2l |
, |
где |
|||
|
|
|
|
|
|||||||||||||
2 |
2 |
18 EF |
|||||||||||||||
|
|
|
|
|
|
|
3 |
|
|
||||||||
uH = δS + |
l3 – перемещение точки приложения силы, т.е. |
путь, |
|||||||||||||||
пройденный силой. Потенциальная энергия деформации стержне-
|
Nx2 |
l1 |
|
Nx2 |
l2 |
|
Nx2 |
l3 |
|
25 P2l |
|
|||
вой системы U = |
1 |
|
+ |
2 |
|
+ |
3 |
|
= |
|
|
|
. |
|
2EF |
2EF |
2EF |
18 EF |
|||||||||||
|
|
|
|
|
||||||||||
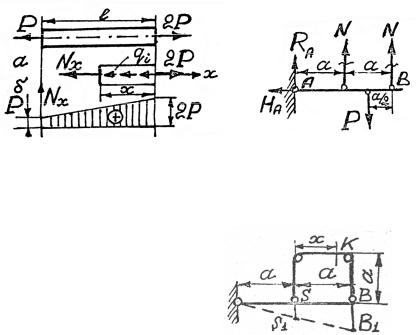
1.3. 1. Сила, вызывающая ускорение, |
равна 2P − P = P ; ускоре- |
|||||||||||||
ние a = P / m ; интенсивность распределенной по длине силы инер-
ции qi = ma / l .
2. Исходя из принципа Даламбера, составим уравнение равновесия для части стержня длиной х (рис. 1.40, а): −Nx −qi x + 2P = 0 ,
откуда Nx = 2P − qi x . При x = 0 Nx = 2P , при x = l |
Nx = P |
(рис. 1.40, б). |
|
Рис. 1.40 |
Рис. 1.41 |
|
1.4. 1. Выделяем объект равновесия с учетом того, что во всех участках троса Nx = N – растягивающие (рис. 1.41).
Рис. 1.42
57
2.Из уравнения равновесия ∑mA = 0 N = P2 .
3.Рассмотрим деформированную систему (рис. 1.42). Пусть се-
чение K неподвижно, тогда отрезок SS = |
SK |
= |
N (a + x) |
|
, отрезок |
||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
EF |
|
|
|
|||||
|
|
|
|
|
N (a + a − x) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
BB |
= |
BK |
= |
, |
|
а |
так |
как |
|
SS1 |
= |
SK |
= |
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||
1 |
|
|
|
EF |
|
|
|
|
|
|
|
|
|
|
|
|
BB1 |
|
BK |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
= |
|
N (a + x) EF |
|
= |
a |
, то 2a − x = 2a + x |
x = 0 . |
|
|
|
|
|
|
|
|||||||||||||
EF N (a + a − x) |
2a |
|
|
|
|
|
|
|
|||||||||||||||||||
|
4. Проверяем |
|
SK = |
|
N a |
; |
BK = |
N 2a |
|
|
SK |
= |
|
a |
. |
|
|
|
|||||||||
|
|
|
|
|
EF |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
EF |
|
|
|
|
BK |
|
2a |
|
|
|
|||||||
1.5. 1. Выделяем объект равновесия (рис. 1.43).
2. Составляем уравнение равновесия в виде суммы проекций сил на ось, проведенную так, чтобы в уравнение вошли только интересующие нас силы в упругих элементах (т.е. на ось, перпендикуляр-
ную к AB ), ∑y=0 : −Psin 30+Nx2 +Nx1 sin 30= 0 .
Рис. 1.43 Рис. 1.44
3. Строим диаграмму перемещений для узла B (рис. 1.44). l1 = l ,
l2 = l / sin 30 , |
B1 |
– новое |
положение узла |
B , |
BB 1= l2 , |
|||||
|
|
Nx |
l1 |
|
|
|
|
|
|
|
BB = |
l = |
1 |
|
= 0,08 см |
N |
x |
=16 |
кН. |
|
|
|
|
|
|
|||||||
2 |
1 |
EF |
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
4. Из диаграммы перемещений |
|
l1 = |
l2 sin 30 |
Nx |
= Nx . |
|||||
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
58 |
|
|
|
|
|
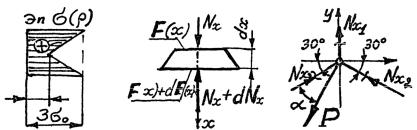
5. Подставляя значения Nxi в уравнение п.2, найдем: P = 48 кН.
1.6. Вариант 1. Так как справедлива гипотеза плоских сечений, т.е. ε =const, то эпюра σx (ρ) согласно закону Гука σx (ρ) = ε E(ρ) будет иметь вид, представленный на рис. 1.45.
Вариант 2. Для случая, если необходимо указать значения σx на эпюре, выраженные через заданные P и r .
1. Из эпюры E (ρ) следует, что E (ρ)= E 1 |
+ |
2ρ |
. |
|
|
|
|
||||||||
r |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
2. σx (ρ) = ε E (ρ) . Тогда |
P = ∫σx (ρ) dF = |
7 |
π ε E r2 |
(где |
|||||||||||
3 |
|||||||||||||||
|
|
3P |
|
|
F |
3P |
|
|
2ρ . |
|
|||||
dF =2πρ dρ), откуда |
ε = |
|
, |
σx (ρ)= |
|
1 |
+ |
При |
|||||||
7πE r2 |
7π r2 |
||||||||||||||
|
|
|
|
|
|
|
|
r |
|
||||||
ρ = 0 σx (ρ)= σ0 = |
3P |
; при ρ= r σx (r) = 3σ0 = |
|
9P |
. |
||||||||||
7πr2 |
|
7πr2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 1.45 Рис. 1.46 Рис. 1.47
1.7. 1. Воспользуемся методом сечений и выделим элемент на расстоянии x от верхнего сечения, высотой dx (рис. 1.45).
2. ∑x = 0 : Nx −(Nx + dNx )+ γ F (x) dx = 0 , откуда |
dNx = |
||
= γF (x) dx =[σ] dF (x), так как в любой точке σx = |
dNx |
=[σ] . |
|
dF (x) |
|||
|
|
||
59
3. Разделив переменные |
и |
проинтегрировав, |
P |
получим |
||||
ln F (x)= |
γ |
|
x +C . Так как |
при |
x = 0 F (x)= F 0= |
|
, тогда |
|
[σ] |
|
|
||||||
|
|
|
|
[σ] |
||||
γx
F (x)= F 0 e[σ] .
1.8. 1. Под действием силы P усилия Nx возникают только в стержнях, прикрепленных к узлу А (рис. 1.47). Уравнения равновесия запишем в виде ∑z = 0 , ∑y = 0 . Задача один раз статически
неопределимая.
2. Изобразим диаграмму перемещений (рис. 1.48). При ее построении выдержано условие строгого соответствия силовой схемы и деформированной системы.
|
3. |
Составим |
дополнительные уравнения AA1 = |
l1 |
= |
||||
|
cos(β− γ) |
||||||||
|
|
|
|
|
|
|
|
||
= |
|
l2 |
= |
|
l3 |
. Из дополнительных уравнений найдем угол γ , |
|||
cos(2β− γ) |
cos γ |
||||||||
|
|
|
|
|
|||||
значения которого сравним с углом α , полученным из уравнения равновесия п.1. Доказательством послужат равенства этих углов.
Рис. 1.48 Рис. 1.49 Рис. 1.50
1.9. Из условия следует, что изменение длины стержней зависит
только от температуры, т.е. l = α |
t li . Построим диаграмму пе- |
ремещений шарнира А (рис. 1.49). |
А1 – новое положение шарнира |
60