

Исаченко Сопротивление материалов ч.1 2010
.pdfVI операция. Определение перемещений заданных сечений.
Прогиб сечения С найдем, подставив в (5.10) значения θ0 и y0 , а
также x = 2l ; получим yC = |
5 ql 4 |
= 0,61 10−2 м. |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||
24 EJ z |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Продифференцируем уравнение (5.10), тогда |
|
|
|
|
||||||||||||
EJ z |
dy |
= EJ zθ = EJ z θ0 |
|
|
q(x − 0) |
3 |
|
|
RB (x −l)2 |
|
q(x − l)3 |
|||||
|
|
|
|
|
||||||||||||
|
− |
|
|
|
|
|
+ |
|
+ |
|
|
− |
||||
dx |
3! |
|
|
2! |
3! |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
x>l |
|
|
|
|
|
|
|
− |
|
P(x − 2l)2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
. |
|
|
|
(5.11) |
|||
|
|
|
|
2! |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x>2l
Угол поворота сечения D найдем, подставив в (5.11) значение x = 3l :
θD = − 18 ql3 = −0,011 рад = −0,63°. 24 EJ z
VII операция. Изображение изогнутой оси балки. Изогнутую ось удобно строить на эпюре изгибающего момента M z , так как
знак эпюры M z указывает на то, какие волокна балки сжаты, а какие растянуты. Согласно принятому правилу знаков эпюра M z
всегда «располагается» на сжатых волокнах.
Изогнутая ось заданной балки изображена штриховой линией на рис. 5.5, в, при этом масштаб искажен в сторону большого увеличения прогибов и углов поворота сечений.
Примечание. Решение задачи может быть упрощено, если расположить начало координат на опоре D (ось х направить справа налево). В этом случае не нужно будет догружать балку дополнительной и компенсирующей нагрузкой; начальный параметр y0 = 0 . При этом нужно помнить, что правило знаков для угла поворота
θ меняется на противоположное, т.е. при θ > 0 сечение поворачивается от своего первоначального положения по часовой стрелке, а при θ < 0 – против часовой стрелки, что справедливо и для метода непосредственного интегрирования дифференциальных уравнений изогнутой оси.
П р и м е р 3
Определить стрелу прогиба для консольной балки (рис. 5.6).
221

Рис. 5.6
I операция. Изображение расчетной схемы (см. рис. 5.6)
II операция. Определение опорных реакций. Используя урав-
нения равновесия в виде ∑X = 0 ; ∑Y = 0 ; ∑mA = 0 , найдем,
что H A = 0 ; RA = 3ql , M A = 9ql 2 .
Для проверки можно воспользоваться уравнением ∑mB = 0 .
III операция. Составление универсального уравнения:
EJ z y = EJ z y0 |
+ EJ z θ0 |
|
x1 |
− |
M A (x − 0) |
2 |
+ |
|
|
|||
1! |
|
|
2! |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
RA (x − 0)3 |
|
|
tg β(x − l)5 |
|
|
|||||
|
+ |
|
− |
, |
(5.12) |
|||||||
|
|
|
5! |
|
|
|||||||
|
|
|
3! |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
x>l |
|
|
|
|
tg β = 23ql .
IV операция. Определение начальных параметров. Располо-
жение начала координат в заделке определяет, что y0 = 0 и θ0 = 0 .
V операция. Определение прогиба |
yC . Подставляя в (5.12) |
||
значения y0 , θ0 и x = 4l , найдем, что |
|
||
yC = f = − |
41,3ql 4 |
. |
|
EJ z |
|||
|
|
||
П р и м е р 4
Определить стрелу прогиба в консольной балке (рис. 5.7, а).
222
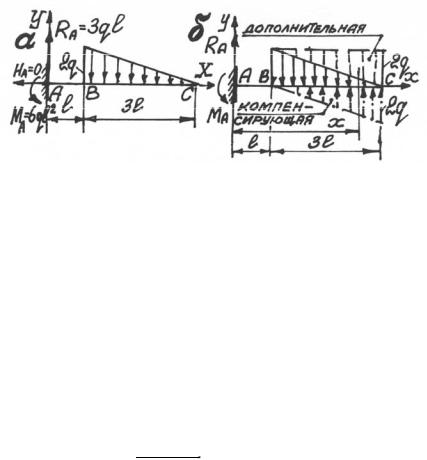
Рис. 5.7
I операция. Изображение расчетной схемы (см. рис. 5.7, а). II операция. Определение опорных реакций. Используя урав-
нения равновесия в виде ∑X = 0 , ∑Y = 0 , ∑mA = 0 , найдем,
что H A = 0 , RA = 3ql , M A = 6ql 2 .
Для проверки можно воспользоваться уравнением ∑mB = 0 .
III операция. Составление расчетной схемы с учетом правил метода начальных параметров (рис. 5.7, б).
IV операция. Составление универсального уравнения:
|
EJ z y = EJ z y0 + EJ z θ0 x |
− |
M A (x − 0)2 |
+ |
RA (x − 0) |
3 |
− |
|||||
|
2! |
|
3! |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
− |
2q(x − l)4 |
+ |
tg β(x − l)5 |
, |
|
(5.13) |
|||
|
|
|
4! |
|
5! |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2q |
|
x>l |
|
|
|
|
|
|
|
|
где |
tg β = |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
3l |
|
|
|
|
|
|
|
|
|
|
Vоперация. Определение начальных параметров. y0 = 0 и
θ0 = 0 , что является следствием расположения начала координат в
заделке.
VI операция. Определение прогиба сечения С. Подставляя в
(5.13) значения y0 , θ0 и x = 4l , найдем, что
223

yC = f = − |
21,4ql 4 |
|
|
. |
|
|
||
|
EJ z |
|
П р и м е р 5
Для консольной балки AD (рис. 5.8, а) определить прогиб сечения D и угол поворота сечения С.
Рис. 5.8
I операция. Изображение расчетной схемы (см. рис. 5.8, а). II операция. Определение опорных реакций. Используя урав-
нения равновесия в виде ∑X = 0 , ∑Y = 0 , ∑mA = 0 , найдем,
что H A = 0 , RA =12ql , M A = 60ql 2 .
Для проверки можно воспользоваться уравнением ∑mC = 0 .
III операция. Составление расчетной схемы с учетом правил метода начальных параметров (рис. 5.8, б).
IV операция. Составление универсального уравнения:
|
EJ z y = EJ z y0 + EJ z θ0 x − |
M A |
(x − 0) |
2 |
+ |
RA |
(x − 0) |
3 |
− |
||||||||
|
|
|
2! |
|
|
|
3! |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
tg β(x − l)5 |
|
4q(x − 7l)4 |
|
tg β(x − 7l)5 |
|
|
|
||||||
|
|
− |
|
+ |
|
|
+ |
|
|
|
|
|
, |
(5.14) |
|||
|
|
5! |
4! |
|
5! |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
2q |
|
x>l |
|
x>7l |
|
|
|
|
|
|
|
|
|
|
|
где |
tg β = |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
3l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
224

Vоперация. Определение начальных параметров. y0 = 0 и
θ0 = 0 , что является следствием расположения начала координат в
заделке.
VI операция. Определение искомых перемещений. Прогиб сечения D найдем, подставив в (5.14) значения y0 , θ0 и x =10l :
yD = f |
= − |
1313,2ql 4 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
EJ z |
|
|
|
|
||||||
Для определения θC продифференцируем уравнение (5.14), в |
|||||||||||||||
результате получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EJ z y′ = EJ z θ = −M A x + |
RA |
x2 |
|
tg β(x − l)4 |
|
4q(x − |
7l)3 |
||||||||
|
|
||||||||||||||
|
|
|
|
− |
|
|
|
|
+ |
|
|
+ |
|||
|
2 |
|
|
24 |
6 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
tg β(x − 7l)4 |
|
|
|
x>l |
|
x>7l |
||||||||
+ |
. |
|
|
|
(5.15) |
||||||||||
|
|
24 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя в (5.15) x = 7l , найдем, что |
|
|
|
|
|||||||||||
θC = − |
164 q l3 |
|
|
|
|
||||||||||
|
|
|
|
|
|
. |
|
|
|
|
|
||||
|
|
EJ z |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
5.4. Интеграл Мора
Интеграл Мора для определения перемещений при изгибе, пренебрегая влиянием поперечной силы, имеет вид
|
M z |
|
z dx |
|
|
||
δ = ∫ |
M |
, |
(5.16) |
||||
EJ |
z |
||||||
L |
|
|
|||||
|
|
|
|
||||
где δ – перемещение (прогиб или угол поворота), M z – значение
изгибающего момента в текущем сечении силового участка от заданных нагрузок или, как принято говорить, от грузового состояния балки (сами моменты M z при этом называют грузовыми мо-
ментами, а эпюру M z – грузовой эпюрой), M z – значение изги-
бающего момента в том же текущем сечении от единичного усилия, но приложенного в том сечении, перемещение которого опре-
225

деляется, и по тому направлению, по которому определяется перемещение.
Если определяется прогиб, т.е. δ = y , то единичное усилие пред-
ставляет собой сосредоточенную силу P0 =1, а если определяется угол поворота, т.е. δ = θ, то единичное усилие представляет собой
сосредоточенный момент M 0 =1 .
Предел интегрирования L в формуле (5.16) указывает на то, что интегрирование должно быть произведено по всей длине балки.
Полученное в результате интегрирования значение δ со знаком «+» (плюс) говорит о том, что перемещение δ совпадает с направлением единичного усилия, и, наоборот, знак «–» (минус) свидетельствует о том, что перемещение δ направлено в сторону, противоположную направлению единичного усилия.
Порядок определения перемещений с помощью интеграла Мора рассмотрим на конкретном примере.
П р и м е р 6
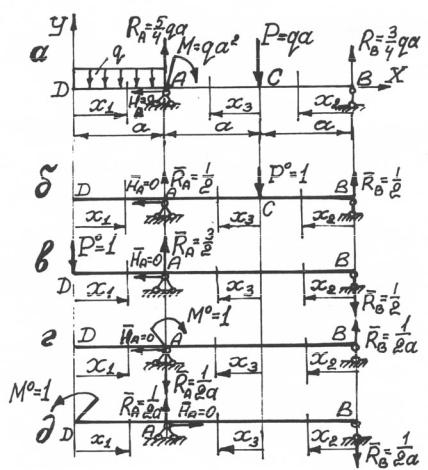
Определить для балки (рис. 5.9, а) постоянной жесткости прогибы в сечениях С и D и углы поворотов сечений А и D.
Iоперация. Изображение расчетной схемы (см. рис. 5.9, а). II операция. Определение опорных реакций. Используя урав-
нения равновесия в виде ∑X = 0 , ∑mB = 0 , ∑mA = 0 , найдем,
что H A = 0 , RA = 54 qa , RB = 34 qa .
Для проверки можно воспользоваться уравнением вида
∑Y = 0 .
III операция. Наметим абсциссы xi текущих сечений для каж-
дого силового участка балки, при этом будем стремиться к тому, чтобы в выражении для изгибающих моментов входило как можно меньше членов. Начало абсцисс xi будем устанавливать не в ка-
ком-либо одном, раз выбранном сечении, а от начала каждого силового участка, что определит во всех интегралах нижний предел, равный нулю (см. абсциссы xi на рис. 5.9, а). Итак, 0 ≤ x1 ≤ a ,
0 ≤ x2 ≤ a , 0 ≤ x3 ≤ a , не забывая, что изгибающий момент в сече-
226
нии равен алгебраической сумме моментов всех сил, лежащих по одну сторону от сечения (см. значение M z в IV операции).
Рис. 5.9
IV операция. Определение изгибающих моментов M z в те-
кущих сечениях каждого силового участка:
|
qx2 |
|
|
|
|
|
||
M z = − |
1 |
, M z |
|
= RB x2 , |
M z |
|
= RB (a + x3 ) − P x3 . |
|
2 |
2 |
3 |
||||||
1 |
|
|
|
|
||||
|
|
|
|
|
|
|
||
227
(О правиле знаков для изгибающих моментов см. с. 166 – 168.)
V операция. Изображение единичной системы. Единичной системой будем называть схему балки, загруженную только (!) единичным усилием в соответствующем сечении по искомому направлению.
Для определения yC единичная система представлена на рис. 5.9, б, для определения yD – на рис. 5.9, в, для определения θA – на рис. 5.9, г, для определения θD – на рис. 5.9, д.
Для каждой единичной системы повторяем те же операции II, III, IV, что и для балки, загруженной заданными усилиями.
На схемах единичных систем показаны реакции опор, те же абсциссы текущих сечений, что и на рис. 5.9, а.
Изгибающие моменты для единичных систем будут равны:
для схемы рис. 5.9, б (определение прогиба yC ):
|
|
|
|
|
|
|
= 0 , |
|
|
|
= |
|
|
|
|
B x2 , |
|
|
z |
|
= |
|
|
|
|
B (a + x3 ) − P0 x3 ; |
|||||||||||||||||||||||||||||||
|
|
M |
z |
M |
z |
2 |
R |
M |
|
R |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
для схемы рис. 5.9, в (определение прогиба yD ): |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
= −P0 x , |
|
|
|
|
|
|
|
|
= − |
|
|
|
|
x |
|
, |
|
|
|
|
|
|
|
|
|
= − |
|
|
|
(a + x |
|
) ; |
|||||||||||||||||||
M |
z |
M |
z |
|
R |
B |
2 |
|
|
|
M |
z |
|
|
R |
B |
3 |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
для схемы рис. 5.9, г (определение угла поворота θA ): |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
z = 0 , |
|
|
|
|
z |
|
|
|
|
= |
|
B x2 , |
|
|
|
|
z = |
|
B (a + x3 ) ; |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
M |
|
M |
2 |
|
R |
|
M |
R |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
для схемы рис. 5.9, д (определение угла поворота θD ): |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
z |
|
|
= −M 0 , |
|
|
|
|
z |
|
|
|
= − |
|
B x2 |
, |
|
|
|
|
z |
|
= − |
|
B (a + x3 ) . |
|||||||||||||||||||||||||||||
|
|
M |
|
|
|
|
M |
2 |
R |
|
|
M |
|
R |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
VI операция. Последняя. Запись интегралов Мора, проведение интегрирования и получение значений перемещений
|
|
|
|
1 |
|
a |
|
3 |
|
|
|
|
1 |
|
a |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
yC = |
|
|
∫ |
|
|
|
|
qax2 |
|
|
x2 dx + ∫ |
|
|
|
qa(a + x3 ) − qax3 |
× |
|||||||||||||||||||
|
|
|
4 |
2 |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
EJ z |
|
|
|
|
|
|
|
0 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 qa4 |
|
|
|
|
|
|
||||||
|
|
|
|
|
× |
|
|
|
|
(a + x3 ) −1 |
x3 dx |
= |
|
|
|
|
|
, |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
24 EJ z |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1 |
a |
|
|
|
|
qx |
2 |
|
|
|
|
|
a |
3 |
|
|
|
|
|
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
(− x |
)dx + |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
y |
|
= |
|
|
|
|
− |
|
|
1 |
|
|
|
|
|
|
qa x |
|
− |
|
x |
|
dx + |
|||||||||||||
D |
EJ z ∫ |
|
|
2 |
∫ |
4 |
|
2 |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
2 |
|
|
2 |
|
|
|||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
228

a |
3 |
|
|
1 |
|
|
|
11 |
|
qa |
4 |
|
||
+ ∫ |
|
|
|
|
|
|||||||||
|
|
qa(a + x3 ) − qa x3 |
− |
|
(a + x3 ) dx |
= − |
|
|
|
|
, |
|||
4 |
2 |
24 EJ z |
||||||||||||
0 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где знак «–» (минус) в результате говорит о том, что балка в сечении D прогибается вверх, в сторону противоположную направле-
нию P0 =1, приложенном в сечении D.
|
1 |
a |
3 |
|
1 |
|
|
a |
3 |
|
|
|||
|
|
|
|
|
|
|||||||||
θA = |
|
∫ |
|
|
qax2 |
|
|
x2 |
dx + ∫ |
|
|
qa(a + x3 ) − qax3 |
× |
|
|
4 |
2a |
4 |
|||||||||||
|
EJ z |
|
|
|
|
|
0 |
|
|
|
||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
θD =
+a∫ 3
0 4
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
14 qa3 |
|
|
|
|
|
|
|
|
|||||||
|
|
× |
|
|
|
|
(a + x3 ) dx |
= |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|||||||||
|
|
2a |
|
24 EJ z |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
a |
|
|
|
qx |
2 |
|
|
|
|
|
a |
|
3 |
|
|
|
|
|
1 |
|
|
|
|
|||||||
1 |
|
|
|
|
(−1)dx |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
− |
|
|
|
1 |
+ |
|
|
|
|
|
qax |
|
− |
|
|
x |
|
dx + |
|||||||||||
EJ z ∫ |
|
|
2 |
∫ |
4 |
2a |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
10 qa3 |
|||||||
qa(a + x3 ) − qax3 |
|
− |
|
|
|
|
(a + x3 ) dx = − |
|
|
|
|
|
, |
||||||||||||||||||
|
2a |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 EJ z |
||||||||
где знак «–» (минус) в результате свидетельствует о том, что угловое перемещение θD направлено в сторону, противоположную на-
правлению момента M 0 =1 , т.е. по часовой стрелке.
В выражении для yC и θA не проводится интегрирование по
первому силовому участку, так как при наличии грузового момента, отличного от нуля на этом участке, момент от единичного уси-
лия M z1 = 0 .
5.5. Способ Верещагина
Способ (правило) Верещагина представляет собой графоаналитическое решение интеграла Мора. Согласно этому способу перемещение
|
ω |
|
C |
, |
|
δ = |
M |
(5.17) |
|||
|
|
|
|||
|
EJ z |
|
|||
где ω – грузовая площадь, т.е. площадь эпюры M z |
от заданных |
||||
нагрузок; M C – ордината эпюры изгибающего момента от единич-
229
ного усилия под центром тяжести грузовой площади ω. Единичное усилие, как и при определении перемещений с помощью интеграла Мора, приложено в том сечении, перемещение которого находится, и по тому направлению, по которому определяется перемещение.
Операция в числителе формулы Верещагина (5.17) получила название «перемножение» эпюр.
Способ Верещагина допускает «перемножение» эпюр только в том случае, если одна из «перемножаемых» эпюр ограничена прямой неломаной линией, а такими эпюрами как раз и являются эпюры от единичных усилий.
Определение M С не представляет труда. Затруднения возникают при определении положения центра тяжести грузовых площадей ω. Для решения этой задачи воспользуемся следующими рекомендациями.
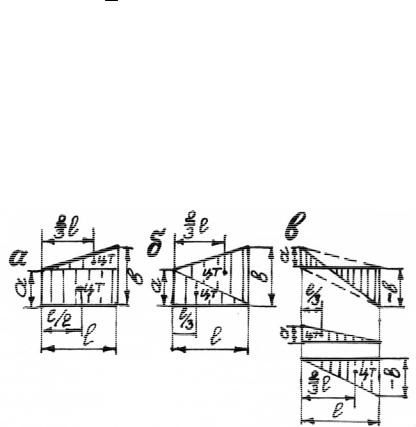
Сложную грузовую эпюру M z следует разбить на простые фи-
гуры, для каждой из которых легко определить абсциссу центра тяжести. При этом площадь каждой простой фигуры умножают на ординату единичной эпюры под ее, простой фигуры, центром тяжести. На рис. 5.10, а, б показаны два варианта разбиения трапеции на простые фигуры, а на рис. 5.10, в – преобразование «перекрученной» трапеции.
Рис. 5.10
230