

Исаченко Сопротивление материалов ч.1 2010
.pdfс известным значением интенсивности q. Если балку догрузить силой P, то при каком значении этой силы прогиб балки в сечении А будет равен нулю?
Задача 5.3. Для балки с промежуточным шарниром (рис. 5.20), которая имеет постоянную жесткость EJ z = 7300 кН м2 , постро-
ить изогнутую ось, определив перемещения необходимых сечений.
Дано: Р = 40 кН, M = 40 кН м , а = 1 м.
Рис. 5.20
Рис. 5.21
Задача 5.4. Для однопролетной балки с правой консолью (рис. 5.21), нагруженной на конце консоли силой Р, замерен максимальный прогиб ymax = f на пролете между опорами. Опреде-
лить наибольшее значение нормальных напряжений в опасном поперечном сечении балки и величину силы Р. Известны размеры прямоугольного поперечного сечения, длина l пролета и модуль упругости Е для материала балки.
Задача 5.5. Однопролетная балка загружена распределенной нагрузкой, как показано на рис. 5.22. Определить прогиб посредине пролета балки, если жесткость поперечного сечения EJ z постоян-
на по всей длине.
241
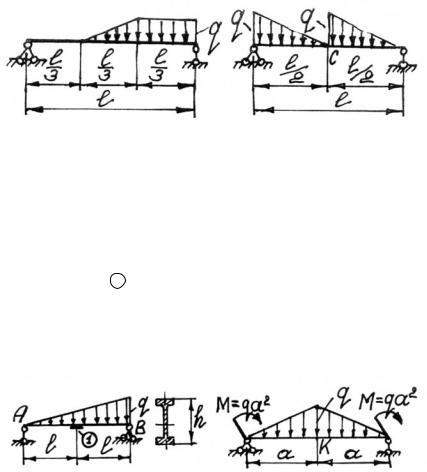
Рис. 5.22 |
Рис. 5.23 |
Задача 5.6. Однопролетная балка загружена распределенными по линейному закону нагрузками с наибольшей интенсивностью q (рис. 5.23). Определить прогиб сечения С балки, если жесткость ее
EJ z = const.
Задача 5.7. Однопролетная балка (рис. 5.24) загружена распределенной нагрузкой, изменяющейся по линейному закону. Изме-
ренная датчиком 1 продольная деформация составила ε = 5 10−4 . Найти взаимный угол поворота сечений А и В, если l = 15h.
Задача 5.8. Балка (рис. 5.25) загружена распределенной нагрузкой и сосредоточенными моментами. Определить угол поворота поперечного сечения K, если жесткость EJ z = const.
Рис. 5.24 |
Рис. 5.25 |
Задача 5.9. Для балки (рис. 5.26), загруженной сосредоточенными моментами M = q0l 2 и распределенной нагрузкой, изменяющейся по
закону q = q0 sin πlx , найтипрогибсеченияK, если EJ z = const.
Задача 5.10. Балка постоянной жесткости EJ z с промежуточным шарниром K (рис. 5.27) нагружена парой сил моментом M в
242

двух вариантах: слева и справа от шарнира K. Найти линейное перемещение шарниров, угол поворота сечений приложения момента M и работу пары сил в обоих вариантах. Дано: M, l, E, J z .
Рис. 5.26 |
Рис. 5.27 |
Задача 5.11. Однопролетная балка (рис. 5.28) постоянной жесткости поперечного сечения EJ z загружена по двум вариантам:
железобетонной плитой (см. рис. 5.28, а), деформацией которой пренебрегаем, весом G;
мешками с песком (см. рис. 5.28, б), равномерно распределенными надлине2l балки, имеющими общийвес G, равныйвесуплиты.
Рис. 5.28
Определить, насколько отличается максимальный прогиб в балке в обоих вариантах нагружения.
Рис. 5.29
243
Задача 5.12. Для балки постоянной жесткости поперечного сечения EJ z (рис. 5.29) найти расположение опор, при котором от указанной нагрузки прогиб посредине балки будет равен нулю.
5.7.Решения, указания, ответы
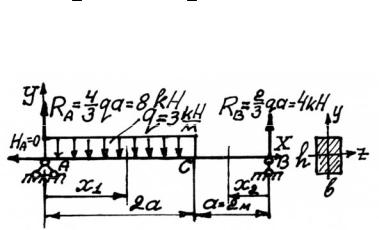
5.1.Изобразим расчетную схему (рис. 5.30). Используя уравнения равновесия в виде ∑X = 0 , ∑mB = 0 , ∑mA = 0 , найдем, что
H A = 0 , RA = 43 qa =8 кН, RB = 23 qa = 4 кН. Проверку правильно-
сти определения реакций опор выполним, составив уравнение вида
∑Y = 0 .
Рис. 5.30
Для того, чтобы получить более простые выражения изгибающих моментов для силового участка АС абсциссу текущего сечения x1 будем отсчитывать от опоры А, а для силового участка ВС – x2
будем отсчитывать от опоры В.
Составим дифференциальные уравнения изогнутой оси балки для каждого силового участка и дважды проинтегрируем их:
|
|
|
|
qx2 |
|
|
|
|
|
|
||
EJ z y1′′ = RA x1 |
− |
1 |
|
, |
EJ z y2′′ = RB x2 ; |
|
||||||
2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
EJ z y1′ = |
RA x12 |
|
− |
qx13 |
|
+ C1 , (1) |
EJ z y2′ = |
RB x22 |
|
+ C2 ; (2) |
||
2 |
|
|
|
2 |
||||||||
|
|
|
6 |
|
|
|
|
|
|
|||
244
|
|
|
RA x3 |
qx4 |
|
|
|
|
|
|
|
R |
B |
x |
2 |
|
|
|
|
|
|
|
|
EJ |
z |
y = |
1 |
− |
1 |
+ C x |
+ D , (3) |
EJ |
z |
y |
2 |
= |
|
|
+ C |
2 |
x |
2 |
+ D |
2 |
. (4) |
||
|
|
|
|
||||||||||||||||||||
|
1 |
6 |
|
24 |
1 1 |
1 |
|
|
|
|
6 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для определения постоянных интегрирования воспользуемся граничными условиями:
при x1 |
= 0 : |
y1 = 0 D1 = 0 ; |
|
|
при x2 = 0 : |
y2 = 0 |
D2 = 0 ; |
|
|
при x1 |
= 2a и x2 = a : |
y1 = y2 = yC , |
(а) |
|
|
|
|
θ1 (С) = −θ2 (С) , |
(б) |
здесь знак «–» (минус) перед θ2 (С) объясняется тем, что оси x1 и x2 направлены в противоположные стороны, поэтому правило знаков для θ2 меняется на обратное, по отношению к правилу зна-
ков для θ1 .
Условие а) приводит к следующему выражению:
RA (2a)3 |
− |
q(2a)4 |
+ C 2a = |
RB a3 |
+ C |
2 |
a . |
|
|
|
|||||
6 |
24 |
1 |
6 |
|
|
||
|
|
|
|
||||
Условие б) дает равенство:
RA (2a)2 − q(2a)3 + C = − |
RB a2 |
− C |
|
. |
|||
2 |
|
6 |
1 |
2 |
|
2 |
|
|
|
|
|
||||
Подставляя численные значения в последние два равенства, получим
72 + 6C1 = 3C2 ,
40 + C1 = −C2 ,
откуда C1 = −21,3 кН м2 , С2 = −18,7 кН м2 .
Для определения абсциссы сечения, которое имеет наибольший прогиб, исследуем на экстремум уравнение (3):
dy |
= 0 : |
RA x12 |
− |
qx13 |
+ C = 0 |
xmax = 2,889 м. |
dx |
2 |
6 |
1 |
1 |
||
|
||||||
Поставив x1max в выражение (3), получим ymax = f = 3,818 10−2 м.
245
Обращаем внимание, что постоянная C1 ≠ C2 , это определено
тем, что не был применен метод уравнивания постоянных интегрирования (метод Клебша).
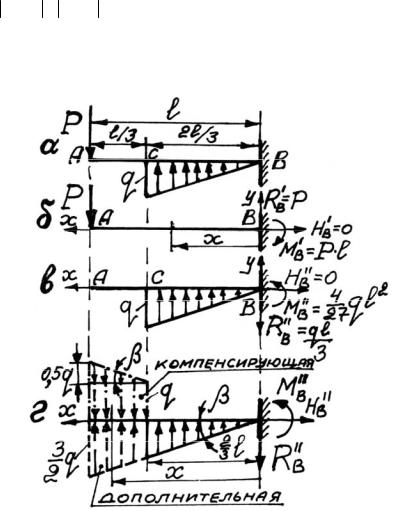
5.2. Прогиб сечения А (рис. 5.31, а) будет равен нулю, если y A (P) = y A (q) .
Для определения прогиба y A (P) воспользуемся расчетной схе-
мой, изображенной на рис. 5.31, б. Начало координат расположим в сечении В.
Рис. 5.31
246

Универсальное уравнение будет иметь вид:
|
|
′ |
|
|
3 |
|
′ |
2 |
|
EJ z y(P) = EJ z y0 + EJ z θ0 x + |
RB (x − 0) |
|
− |
M B (x − 0) |
|
. |
|||
|
|
3! |
|
2! |
|
||||
|
|
|
|
|
|
|
|||
В заделке yB = y0 = 0 , θB = θ0 = 0 , тогда при x = l |
|
|
|||||||
y A (P) = − |
|
Pl3 |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
3EJ z |
|
|
|
|
|
||
где знак «–» (минус) свидетельствует о том, что прогиб y A (P) направлен в сторону, противоположную оси y, т.е. вниз.
Для определения прогиба y A (q) воспользуемся расчетной схемой (рис. 5.31, в), для которой из уравнения равновесия в виде ∑x = 0 ,
∑y = 0 , ∑mB = 0 найдем, что |
′′ |
, |
′′ |
ql |
, |
′′ |
4ql 2 |
. |
|
|
|||||||
H B = 0 |
RB = |
3 |
M B = |
27 |
||||
|
|
|
|
|
|
|
Проверку правильности определения реакций опоры В можно выполнить, составив уравнение равновесия вида ∑mC = 0 , которое являет-
сяследствиемуравнений ∑y = 0 и ∑mB = 0 .
Внесем коррективы в нагрузку на балку (рис. 5.31, г) согласно требованиям метода начальных параметров. Тогда универсальное
уравнение (с учетом того, что |
yB = y0 = 0 |
|
и |
θB = θ0 = 0 ) будет |
|||||||||||||||||
иметь вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′′ |
0) |
2 |
|
|
|
′′ |
|
3 |
|
|
|
tg β(x − 0) |
5 |
|
|||||
EJ z y(q) = |
M B (x − |
|
− |
RB (x − 0) |
|
|
|
+ |
|
|
− |
||||||||||
|
2! |
|
|
|
|
|
|
3! |
|
|
|
|
|
|
5! |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2 |
|
4 |
|
|
|
2 |
5 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
q x − |
|
|
|
|
l |
|
tg β x |
− |
|
|
|
l |
|
|
|
||||
|
|
3 |
|
|
3 |
|
|
|
|||||||||||||
|
− |
|
|
|
− |
|
|
|
, |
|
|
||||||||||
|
4! |
|
|
|
|
|
5! |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
x> |
2 |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где tg β = |
|
q |
. |
|
|
|
|||
|
|
2 |
l |
|
|
|
3 |
||
|
|
|
|
|
247
Тогда при x = l |
|
y A (q) = |
|
|
37ql 4 |
|
|
|
||||
|
|
|
|
|
. |
|
|
|
||||
15 |
81 |
|
|
|
|
|||||||
|
|
|
|
|
EJ z |
37 |
|
|
||||
Из равенства |
|
y A (P) |
|
= y A (q) |
получим, что P = |
|
ql = |
|||||
|
|
|||||||||||
|
|
5 81 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
=0,091ql .
5.3.Заданную балку представим как состоящую из двух: однопролетной с правой консолью и полуподвесной (рис. 5.32, а).
Используя уравнения равновесия, найдем реакции опор и силы взаимодействия в шарнире D (полученные численные значения реакций приведены на рис. 5.32, а).
На рис. 5.32, б изображена эпюра изгибающего момента для всей заданной балки.
Для построения изогнутой оси балки найдем прогибы сечений В, S, D и углы поворота сечений S, D для левой балки, а также угол поворота сечения D для правой балки с помощью универсального уравнения.
Для левой (AD) балки при начале координат в сечении А:
л |
|
|
л |
RA (xл − 0) |
3 |
|
M (xл − a) 2 |
|
|
EJ z yл = EJ z y0 |
+ EJ z θ |
0 xл − |
3! |
|
+ |
2! |
+ |
||
|
|
|
|
|
|
|
|
xл>a |
|
|
+ |
RC (xл − 4a)3 |
. |
|
|
|
(1) |
||
|
|
|
|
|
|||||
|
|
|
3! |
|
|
|
|
|
|
xл>4a
Найдем начальные параметры из граничных условий: при xл = 0 : yл = y0л = 0 ,
при xл = 4a = 4 м: |
yл = yC = 0 θ0л = θA = |
100 |
= |
|
|||
|
|
12EJ z |
|
= 0,00114 рад = 0,0655°.
Подставляяв(1) значения xл =1м, xл = 2 ми xл = 6 м, найдем, что: yB = 0,0007 м = 0,7 мм;
yS = 0,00137 м = 1,37 мм; yD = −0,016 м = –16 мм.
248

Рис. 5.32
Для определения углов поворота сечений продифференцируем уравнение (1):
249
|
dyл |
|
|
л |
|
RA (xл − 0) |
2 |
|
M (xл − a)1 |
|
|||
EJ z |
|
|
= EJ zθл = EJ z θ0 |
− |
|
|
|
|
+ |
|
+ |
||
dx |
|
|
2! |
|
1! |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
xл>a |
|
|
|
|
|
+ |
RC (xл − 4a)2 |
. |
|
|
|
(2) |
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
2! |
|
|
|
|
|
|
|
|
|
|
|
|
|
xл>4a |
|
|
|
|
|
|
|
При xл = 2 |
м: θS = 0,00113 рад = 0,065°. |
|
|
|
|
||||||||
При xл = 6 |
|
м: θлD = −0,0098 рад = –0,563°. |
|
|
|
|
|||||||
Составим универсальное уравнение для правой (DN) балки, выбрав начало координат в сечении D:
п |
|
п |
RD (x − 0)3 |
P(x − 2a)3 |
|
||||
EJ z yп = EJ z y0 |
+ EJ z θ |
0 xп + |
|
|
− |
|
|
, |
(3) |
3! |
|
3! |
|
||||||
где y0п = yD = −16 мм. |
|
|
|
|
x>2a |
|
|
|
|
|
|
|
|
|
|
|
|
||
Из условия, что при xп = 4a : yп = yN = 0 найдем |
|
|
|
||||||
θ0п = θпD = −0,0015 рад = –0,085°. |
|
|
|
||||||
Изогнутая ось |
балки |
изображена |
(сплошная |
линия) |
на |
||||
рис. 5.32, в, где масштаб прогибов и углов поворота существенно увеличен по сравнению с масштабом размеров балки.
5.4. Используя уравнения равновесия, найдем реакции опор балки (рис. 5.33, а). Построим эпюру изгибающего момента M z (рис. 5.33, б), откуда следует, что опасным сечением является сечение В, где действует M z(max) = Pl / 2 .
Запишем универсальное уравнение для балки с учетом, что y0 = y A = 0 при расположении начала координат на опоре А.
|
RA (x − 0)3 |
|
RB (x − l)3 |
|
||
EJ z y = EJ z θ0 x + |
|
− |
|
. |
(1) |
|
3! |
3! |
|||||
|
|
|
|
|||
|
|
|
|
|
|
|
x>l
250