

Оптимальная фильтрация случайного сигнала
В задачах восстановления переданного сигнала неизвестной формы полезный сигнал считается случайным, некоторые статистические характеристики сигнала и помехи предполагаются известными.
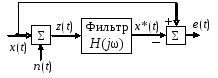
Линейный оптимальный фильтр, выделяющий полезный сигнал x(t) из принятого сигнала z(t) = x(t) + n(t) по критерию минимума дисперсии De сигнала ошибки фильтра e(t) = x(t) – x*(t), называют фильтром Колмогорова – Винера ( x*(t) – выходной сигнал фильтра, n(t) – помеха). Сигналы x(t) и n(t) с известными спектрами мощности Px(ω) и Pn(ω) предполагаются гауссовыми, независимыми друг с друга.
Определение частотной характеристики оптимального фильтра
![]()
Спектр
мощности сигнала ошибки
![]()
![]()
Значение Pe(ω) минимально при условии, что φ(ω) = 0, cos φ(ω) = 1:
![]()
Функция A(ω), минимизирующая Pe(ω) на всех частотах, находится из условия
|
|
Усиление фильтра надо уменьшать на тех частотах, где мощность помехи велика по сравнению с мощностью полезного сигнала.
Определение импульсной характеристики оптимального фильтра
![]() ,
,
![]()
Как и в задаче идентификации объекта, дисперсия De минимальна, если значения hi – решения системы
![]()
Выделение полезного сигнала с использованием модели источника сигнала
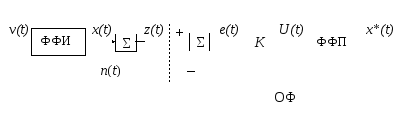
При построении ряда алгоритмов оптимальной фильтрации предполагается, что случайный сигнал источника x(t) – это результат прохождения случайного сигнала v(t) типа белого шума через линейный формирующий фильтр источника (ФФИ). Оптимальный фильтр приемника (ОФ) формирует копию x*(t) переданного сигнала x(t) с помощью формирующего фильтра приемника (ФФП), идентичного ФФИ. Математическая модель ФФИ предполагается известной. Она составляется на основе априорной информации о спектральных и корреляционных характеристиках сигнала x(t) и может корректироваться в процессе работы системы.
Чтобы сигнал x*(t) копировал сигнал x(t), состояние ФФП должно следить за состоянием ФФИ. Максимально возможная точность слежения обеспечивается соответствующим выбором оператора «усиления» К, формирующего сигнал U(t) возбуждения ФФП. С повышением уровня сигнала U(t) уменьшается длительность переходного процесса сигнала ошибки e(t), но увеличивается шумовая составляющая сигнала x*(t). Оптимальный оператор К обычно рассчитывается по критерию минимума среднего квадрата ошибки e(t). Выбор временного интервала усреднения и весовых коэффициентов, с которыми суммируются квадраты ошибок, текущих и предыдущих, зависит от конкретной задачи.
При вычислениях используются рекуррентные алгоритмы определения текущих значений переменных состояния и оператора усиления.
Рассмотренный фильтр называют фильтром Калмана. В отличие от фильтра Колмогорова – Винера, он применим при нестационарных сигналах. При стационарных сигналах фильтры Калмана и Винера дают одинаковые результаты.
Аналоговые фильтры
Линейные фильтры применяются на разных этапах формирования сигналов для прогнозирования последующих значений сигнала, выделения полезной составляющей сигнала и определения его параметров, выравнивания характеристик канала и т.д. Наиболее часто применяются фильтры, пропускающие сигнал только в определенной полосе частот.
Вид частотной характеристики фильтра зависит от корней многочленов в числителе («нулей») и знаменателе («полюсов») передаточной функции фильтра, порядок фильтра определяется числом полюсов. Меняя значения корней, можно получить фильтры различных типов, оптимизирующие отдельные параметры частотной характеристики. Фильтр Баттерворта имеет максимально плоскую АЧХ в полосе пропускания. У фильтра Чебышева и эллиптического фильтра минимальна ширина зоны между полосами пропускания и задерживания, но есть пульсации АЧХ в этих полосах. Фильтр Бесселя имеет наиболее линейную ФЧХ.
Аналоговые фильтры выполняются на RLC-цепочках, полосковых линиях, операционных усилителях с RC-цепочками.
Примеры фильтров порядка 2:

Параметры фильтра низкой частоты:
– граница полосы пропускания ωр ,
– граница полосы задерживания ωs,
– допустимая неравномерность в полосе пропускания Rp,
– минимально необходимое затухание в полосе задерживания Rs.