

5. Висновки Контрольні запитання
Які прилади для вимірювання витрати Ви знаєте?
Будова та принцип дії магніто-індукційних витратомірів.
Будова та принцип дії витратомірів змінного перепаду тиску.
Будова та принцип дії витратомірів постійного перепаду тиску.
Будова та принцип дії лічильників (водомірів).
Зробіть порівняльну характеристику магніто-індукційного витратоміра SITRANS FM MAG 6000 та витратоміра постійного перепаду тиску (ротаметра) типу SITRANS F VA.
Особливості використання витратомірів постійного та змінного перепаду тисків.
Особливості використання магніто-індукційних витратомірів.
Лабораторна робота № 5 Вивчення і дослідження автоматичної системи позиційного і пропорційно-інтегрального регулювання
1. Мета роботи
1.1. Вивчити автоматичну систему з позиційним регулятором.
1.2. Проаналізувати вплив ємності об’єкта регулювання i значення зони нечутливості двохпозиційних регуляторів на показники якості регулювання.
1.3. Вивчити автоматичну систему з пропорційно-інтегральним регулятором.
1.4. Дослідити перехідний процес регулювання в автоматичній системі з пропорційно-інтегральним регулятором.
2. Завдання на виконання роботи
2.1. Ознайомитись з лабораторним стендом.
2.2. Опрацювати загальні відомості про автоматичні системи регулювання (Конспект лекцій, с.22-30).
2.3. Ознайомитися з роботою систем автоматичного регулювання, схемою лабораторної установки та принципом дії приладів, які входять до неї.
2.4. Експериментально визначити перехідні процеси в системі регулювання температури повітря в тепловій камері.
2.5. Побудувати графіки перехідних процесів регулювання, визначити показники якості регулювання і зробити висновок про вплив дії збурення.
3. Загальні теоретичні відомості про системи регулювання
3.1. Відомості про об’єкт регулювання
У загальному випадку під час керування будь-яким технологічним процесом вручну людина виконує такі функції: стежить за допомогою вимірювальних приладів за зміною визначального процес параметра (що характеризує технологічний процес або якість продукції та називається регульованою величиною або вихідним параметром об'єкта) i порiвнює це поточне (дійсне) значення регульованої величини із заданим значенням, яке слід підтримувати у даний момент за умовою оптимального проходження технологічного процесу; визначає значення i знак відхилення (неузгодження) дійсного значення регульованої величини від заданого i, використовуючи органи керування технологічним процесом (вентилі, засувки, крани, дозатори, реостати i т.п.), діє на технологічний процес (матеріальні або енергетичні потоки в ньому) так, щоб усунути це неузгодження.
При цьому технологічний процес або промислова установка (апарат), в якій він протікає і де підтримується (регулюється) задане значення вихідного параметра (регульованої величини) за допомогою спеціально організованих людиною або без її участі (автоматично) зовнішніх діянь, називається об'єктом регулювання ОР.
Діяння на ОР, що призводять до небажаних відхилень регульованої величини (неузгоджень), називаються збурювальними діяннями або збуренями. Для компенсації дії збурень i з метою підтримки на заданому piвні значень регульованої величини на об’єкт подаються регулювальні діяння, що являють собою зміни кількості речовини (енергії), що надходить у технологічний об’єкт.
Щоб мати можливість реалізації керувальних діянь, об’єкт регулювання обладнується регулювальним органом РО.
Сукупність об’єкта OP i автоматичного керувального пристрою (регулятора), що взаємодіють (рис. 1), складає автоматичну систему регулювання АСР.
У реальній АСР, побудованій на базі конкретних промислових приладів та регуляторів, функції приладів та пристроїв можуть суміщатися в одному приладі і тоді структурна схема АСР (рис. 1) може видозмінюватись.
Якщо в АСР регулятор формує регулювальне діяння на основі наявного неузгодження з метою його усунення, то така АСР здійснює принцип регулювання за відхиленням; якщо формує регулювальні діяння певної величини, але у визначені моменти часу, то вона здійснює принцип програмного регулювання; але якщо формування регулювального діяння відбувається в регуляторі на основі виміряного збурення без врахування неузгодження, то АСР здійснює принцип регулювання за збуренням. Можливі і комбіновані принципи регулювання.

Рис.1. Структурна система автоматичного регулювання за відхиленням.
Під дією збурень Z регульована величина Хд об'єкта регулювання ОР відхиляється від встановленого за допомогою задавача Зд заданого значення Хзд . Дійсне значення Хд контролюється давачем Д, який неперервно вимірює регульовану величину i перетворює її в сигнал, який можна передавати на відстань іншим приладам.
Якщо давач виробляє електричний сигнал, що відповідає Хд, а вторинний прилад ВП, який дає можливість візуально оцінити i записати значення регульованої величини Хд , а автоматичний регулятор АР є пневматичними, то для перетворення електричного сигналу у пневматичний використовується електро-пневмоперетворювач ЕПП. Після ЕПП пневматичний сигнал, що відповідає Хд, надходить у вторинний прилад ВП i автоматичний регулятор АР, які повинні могти його сприймати. Автоматичний регулятор АР порівнює значення Хд iз заданим значенням Хзд, що надходить від задавача Зд, i виробляє керувальний сигнал Uр, що діє на виконавчий механізм ВМ. ВM потрібен для перетворення сигналу від АР у відповідний крутний момент або інше зусилля, потрібне для зміни положення регулювального органа РО, який здійснює безпосереднє діяння на об’єкт регулювання шляхом впливу на витрату речовини або енергії, що потрапляє в об'єкт.
Закон, за яким автоматичний регулятор виробляє (найчастіше на основі неузгодження) регулювальний сигнал Uр, називається законом регулювання. Тобто це є функціональна залежність між вихідною величиною регулятора та його вхідною величиною (неузгодженням ∆Х = Хд - Хзд).
Найбільш поширеними регуляторами є:
Позиційний регулятор. Позиційними називаються системи управління, в яких регулювальний орган може (практично миттєво) займати певні фіксовані положення. Залежно від кількості таких положень існують дво-, три- і багатопозиційні системи управління. Двопозиційні системи є найпростішими і знайшли найбільше поширення.
Двопозиційні регулятори формують вихідний сигнал, який дорівнює або 0% (вимкнено), або 100% (ввімкнено) керувальної дії на об’єкт керування залежно від знака неузгодження. Позиційні ПЗ-регулятори прості за конструкцією, надійні в роботі, нескладні в обслуговуванні та налагоджуванні.
Для ідеального позиційного регулятора, що не має зони нечутливості, справедливе таке :
поки поточне значення регулюваної величини Х менше заданого значення ХЗД, то вихідна величина регулятора U набуває мінімального значення (U=0%);
якщо поточне значення регулюваної величини Х, більше заданого значення ХЗД, вихідна величина регулятора U набуває максимального значення (U=100%).
Якість двопозиційного регулювання характеризується параметрами автоколивань, що виникають у системі позиційного регулювання:
амплітуда автоколивань регульованої величини Xmax;
![]()
частота автоколивань;
відхилення а0 середнього значення автоколивань відносно заданого значення регульованої величини.
Чим
менша амплітуда автоколивань і зміщення
(відхилення) а0
регульованої величини, тим вища якість
регулювання і при цьому величина
![]() не повинна бути надто великою.
не повинна бути надто великою.
Пропорційний (П-регулятор) працює за наступним законом:
![]()
Пропорційно-інтегральний (ПІ-регулятор) працює за наступним законом:
![]()
де Кр - коефіцієнт передання регулятора; Ті - час інтегрування.
Величини Кр i Ті - параметри настроювання регуляторів, значення яких визначаються, виходячи з властивостей OP i потрібної якості процесу регулювання.
Перехідний процес — це зміна в часі вихідної регульованої величини об'єкта в АСР від моменту нанесення збурювального або задавального діяння на систему до моменту, коли в об'єкті під дією регулятора настає стан усунення неузгодження.
Перехідні процеси у АСР відбуваються від зміни завдання (рис.2, а) або від дії на ОР збурення (рис.2, б).
Для кількісної оцінки якості перехідного процесу регулювання використовують такі показники:
динамічна похибка регулювання Х1 - максимальне відхилення регульованої величини у перехідному процесі від заданого значення;
статична похибка регулювання Хст - різниця між усталеним i заданим значеннями регульованої величини;
час регулювання τр — час від моменту здійснення діяння (зміна завдання або збурення) до моменту встановлення нового значення регульованої величини (в межах допустимого значення);
- ступінь затухання ψ визначається за формулою:
![]()
перерегулювання Х2 - максимальне відхилення регульованої величини протилежного до X знака.

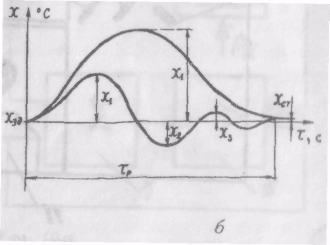
Рис.2. Перехідні процеси у АСР за зміни завдання (а) або за дії на ОР збурення (б).
Загальний вигляд i якість перехідних процесів визначаються властивостями ОР, типом АР i значенням його параметрів настроювання.