

Антропометрические характеристики человека-оператора.
Весьма тесно с характеристиками управляющих движений связаны антропометрические характеристики. Они включают различные размеры человеческого тела.
Антропометрические характеристики делятся на
динамические
статические.
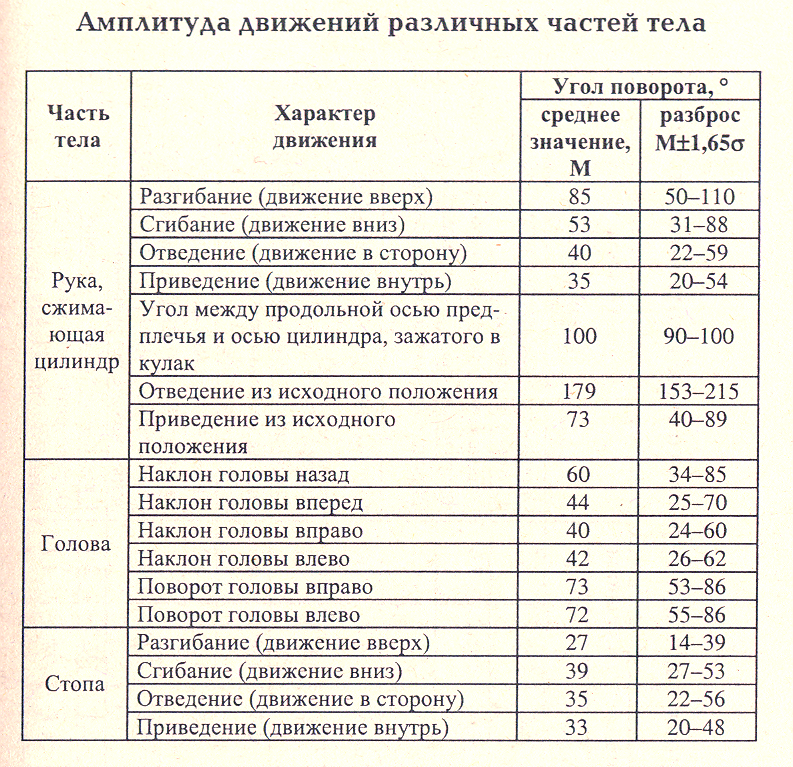
К динамическим характеристикам относятся амплитуды движений головы, рук и ног. Они используются для определения объема рабочих движений, зон досягаемости и видимости.
По ним рассчитывается пространственная организация рабочего места, размах движений вращающихся переключателей, биомеханические модели и манекены.
Основные из динамических характеристик приведены в таблице.
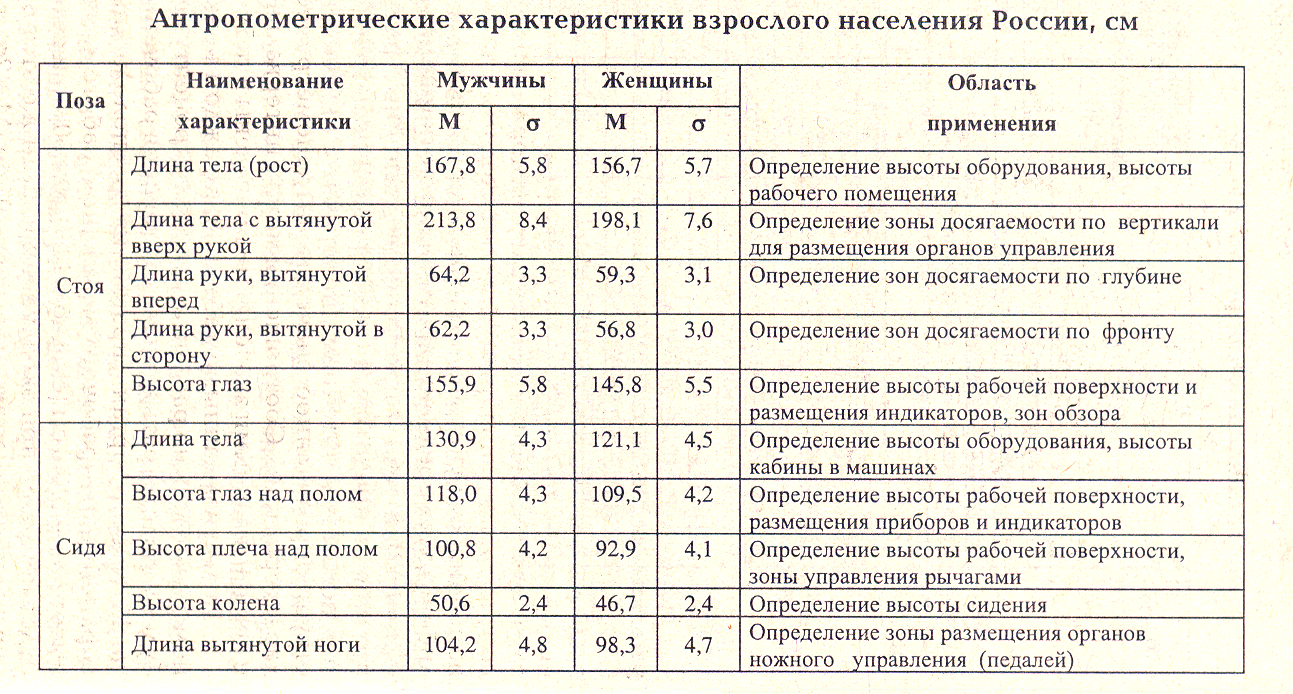
К статическим характеристикам относятся размеры головы, рук, туловища. Они используются для установления размеров конструктивных параметров рабочего места или изделия (высота, ширина, глубина и др.), определения диапазона изменения в случае их регулировки, а также при проведении инженерно-психологической оценки и конструировании манекенов.
Статические антропометрические характеристики могут быть линейными и дуговыми.
В зависимости от ориентации тела в пространстве линейные размеры делятся на продольные (высота различных точек тела над полом или сидением), поперечные (ширина плеч, таза и т. п.), переднезадние (передняя досягаемость рук и др.).
Особую группу статистических характеристик составляют габаритные размеры тела. Они представляют его наибольшие размеры в различных положениях и позах, ориентированные в разных плоскостях.
Габаритными размерами определяется минимальное пространство, необходимое человеку для работы, минимальные размеры между работающими, размеры проходов, проемов, люков и лестниц.
 Как
правило, любая антропометрическая
характеристика является случайной
величиной, подчиненной нормальному
закону распределения.
Как
правило, любая антропометрическая
характеристика является случайной
величиной, подчиненной нормальному
закону распределения.
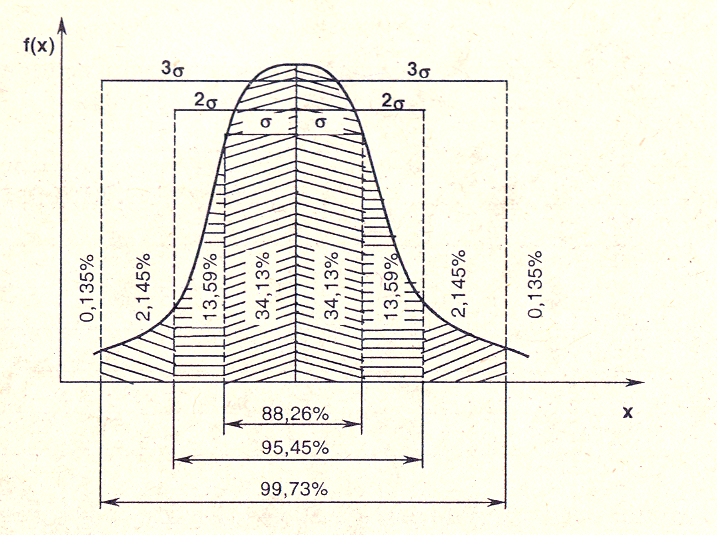
Необходимый диапазон изменчивости учитываемой характеристики задается либо в долях среднеквадратического отклонения σ по отношению к математическому ожиданию М, либо с помощью перцентилей.
Перцентилем называется сотая доля измеренной совокупности, которой соответствует определенное значение антропометрической характеристики.
Соотношения между интервальными и перцентильными значениями приведены в таблице:
Интервал |
Перцентили |
Процент людей, соответствующий данному интервалу |
М±2,5 σ |
1-99 |
98 |
М±2 σ |
1,5-97,5 |
95 |
М± 1,65 σ |
5-95 |
90 |
М± 1,15 σ |
12,5-87,5 |
75 |
М ± σ |
16-84 |
68 |
М ± 0,6 σ |
25-75 |
50 |
Пользуясь данными таблицы, в каждом конкретном случае можно рассчитать, какому проценту людей будет удовлетворять данная конструкция рабочего места.
Например, орган управления, расположенный в верхней части рабочего места (при работе стоя) на высоте М =213,8 см для 50% операторов будет неудобен при эксплуатации. Если же этот орган управления разместить на высоте 197 см (М —2σ),то его достанут 97,5%, а на высоте 205,4 (М — σ) — 84% операторов.
В практике построения рабочих мест обычно не берется более М±2 σ, так как дальнейшее расширение границ нецелесообразно с экономической точки зрения.
Во всех расчетах, где оператор должен что-то доставать, до чего-то дотягиваться, следует исходить из минимальных антропометрических характеристик.
Поэтому минимальными табличными значениями (М — 2 σ) необходимо пользоваться при определении зон досягаемости, а максимальными (М + 2 σ) — при определении размеров кресла, высоты ниши для ног и т. д.
Средние размеры должны использоваться при определении центра лицевой панели пульта управления, зон размещения индикаторов и органов управления.
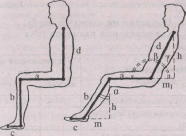
1. Данные характеристики могут использоваться либо непосредственно (если размер части тела по своей ориентации соответствует параметру оборудования), либо путем пересчетов, если рабочая поза не соответствует той, которая принята при антропометрических измерениях.
Например, как следует из рисунка
m = bsinα, m1 = dcosγ,
h= b cos α, h1 = d sin γ.
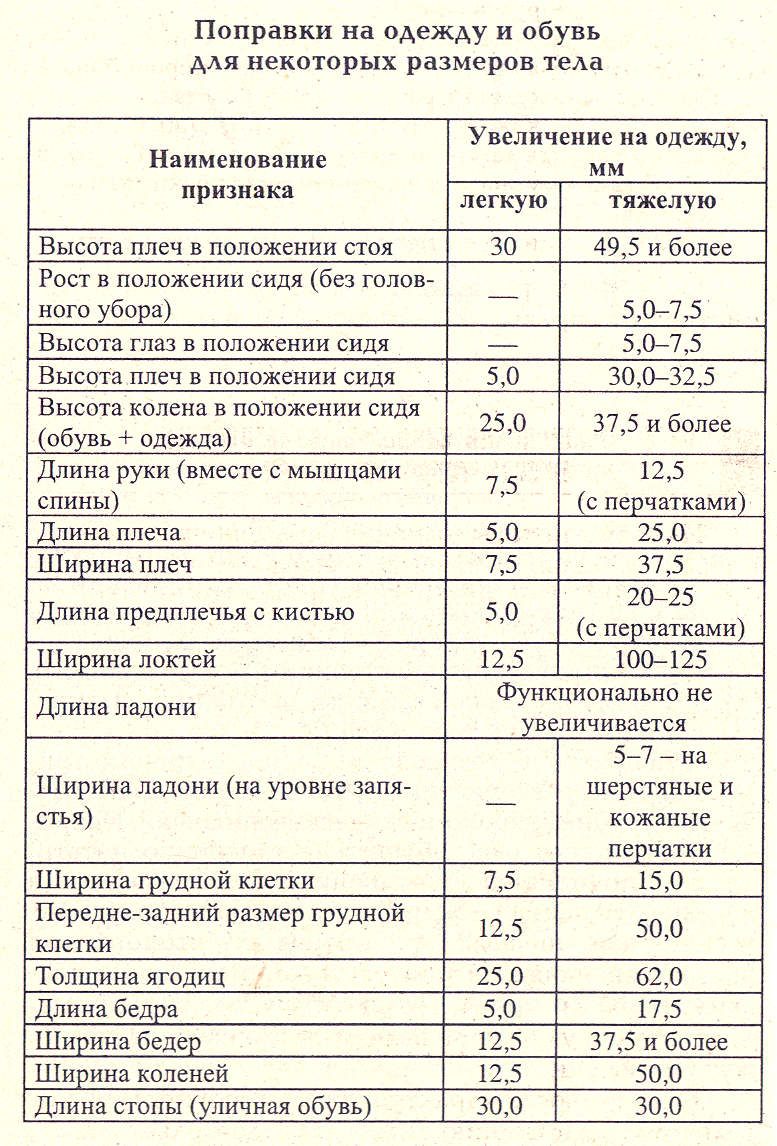
Приведенные в таблице характеристики получены для обнаженного тела. При использовании их на практике необходимо учитывать поправки на одежду и обувь, которые в зависимости от вида антропометрических характеристик могут составлять 5 — 30 мм для легкой одежды, 10 — 50 мм для тяжелой одежды (см. табл.).
При практическом использовании антропометрических характеристик необходимо учитывать маскирующие антропометрические признаки.
Например, за счет расслабления (легко приподнятого) тела происходит уменьшение (увеличение) роста оператора на 40 — 50 мм; легкий наклон корпуса без напряжения на 2—10° вперед и в сторону при работе сидя и стоя способствует уменьшению расстояния до органов управления на 100—120 мм и т. д.
Влияние маскирующих антропометрических факторов учитывается путем соответствующего увеличения (уменьшения) той или иной антропометрической характеристики.
Порядок использования на практике рассмотренных антропометрических характеристик заключается в следующем:
определить контингент людей, для которых предназначено данное оборудование;
выбрать антропометрические характеристики, которые являются основными для определения размеров оборудования и необходимого рабочего пространства;
установить, какому проценту работающих должно удовлетворять данное оборудование, и найти соответствующие ему значения антропометрических характеристик;
учесть соответствующие поправки на одежду и обувь.