

Рабочие режимы и механические характеристики крановых электродвигателей
На рис. 2.2 показаны упрощенные механические характеристики электродвигателей электроприводов подъема и перемещения крана для основных рабочих режимов. В I и III квадрантах располагаются характеристики двигательного режима, во II и IV квадрантах — характеристики тормозных режимов. Обозначения на рисунке: Мд — вращающий момент двигателя, Мс — момент статической нагрузки.
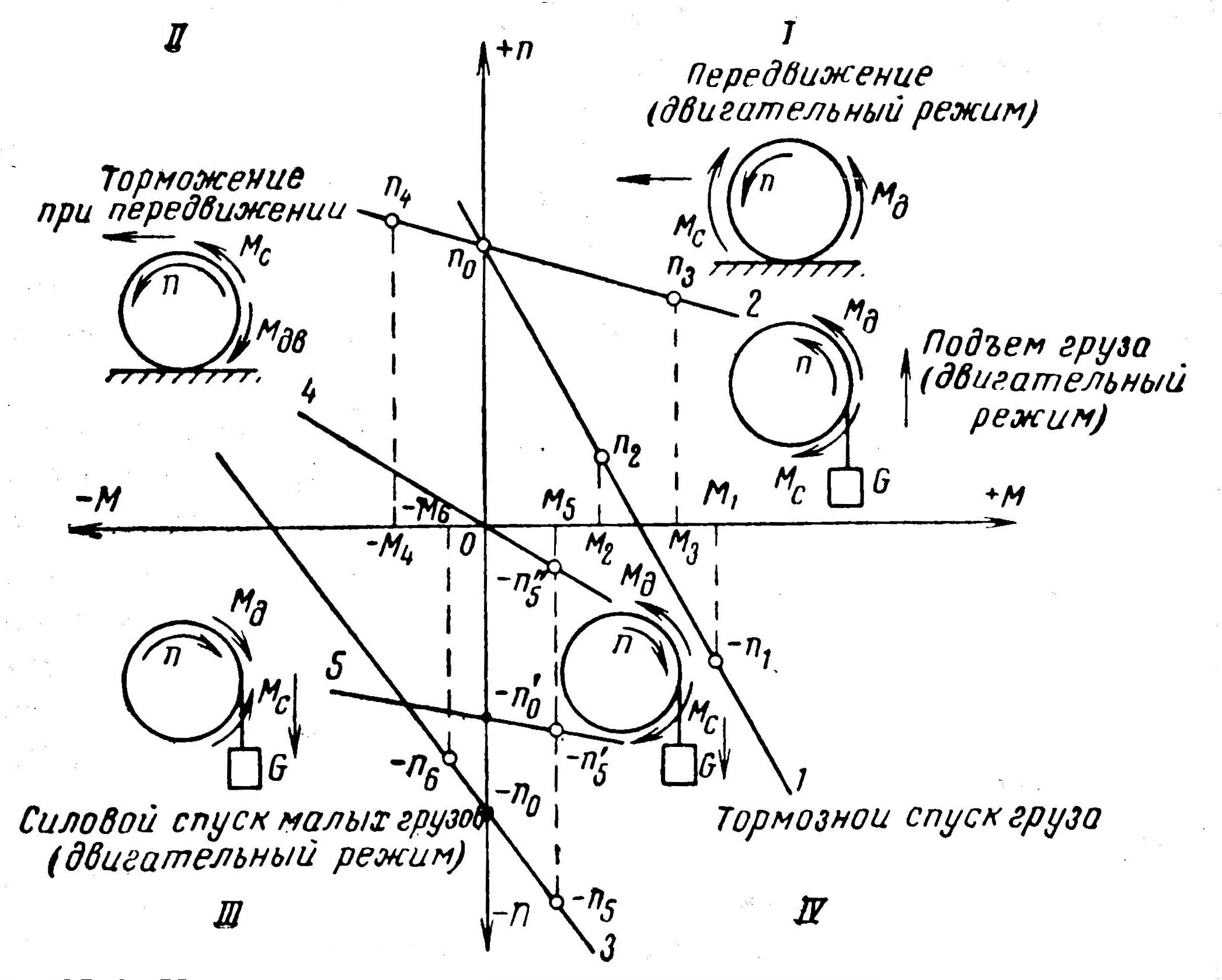
Рисунок 2.2. Упрощенные механические характеристики для основных рабочих режимов электродвигателей кранов.
Двигательный режим. Предположим, что двигатель подъема включен так, что имеет механическую характеристику 1. Тогда при моменте нагрузки МС = М2 двигатель, работая со скоростью n2, осуществляет подъем груза. Момент двигателя совпадает в этом случае с направлением движения и противоположен по направлению моменту статической нагрузки.
Двигательный режим используется также при спуске легких грузов или пустого крюка, когда тормозящий момент трения в механизме подъема превышает по величине момент, создаваемый грузом (крюком). Двигатель работает, например, на характеристике 3, развивая момент Мд = —М6 и скорость —n6. Этот режим получил наименование силового спуска.
Противовключение. При большом грузе (Мс=М1 и той же механической характеристике 1 двигателя подъема происходит спуск груза со скоростью, соответствующей —n1. Двигатель при этом работает в режиме противовключения, так как он включен на подъем (смотреть по направлению момента), но под действием момента нагрузки его ротор вращается в противоположном направлении. В данном случае движущим моментом является момент, развиваемый грузом Мс, а тормозным – момент двигателя Мд. Такой режим спуска груза называется тормозным спуском.
Режим противовключения применяется также для торможения и реверсирования двигателя перемещения крана, если, например, во время движения крана в направлении «вперед» переключить двигатель на направление «назад».
Рекуперативное торможение. Режим генераторного (рекуперативного) торможения получается при скорости двигателя выше скорости идеального холостого хода no. Предположим, что двигатель передвижения крана (который находится на открытом воздухе) работал в двигательном режиме на характеристике 2 со скоростью п3, преодолевая статический момент МС=М3. Внезапно подул сильный попутный ветер, сила которого оказалась достаточной не только для преодоления сопротивления движению, но и могла угнать кран, если бы двигатель не стал создавать тормозной момент -М4, вращаясь со скоростью n4>n0 и рекуперируя энергию в сеть.
Для двигателя подъема режим рекуперативного торможения применяется при тормозном спуске грузов, например, на характеристике 3 при Мс=М5 и |n5|>n0 или на характеристике 5 при том же значении момента и
|n’5|>-n’0.
Динамическое торможение. Этот режим осуществляется при работе двигателя генератором на внешнее сопротивление. Он используется при тормозном спуске груза на малых скоростях (характеристика 4, точка. М5, —n"5), а также для торможения привода до остановки.