

Типовые электроприводы крановых механизмов
Крановые электроприводы по способу управления подразделяются на две большие группы:
- с управлением от силовых контроллеров (при мощности двигателей до 30 кВт)
- с управлением от сложных комплектных устройств, содержащих магнитные контроллеры с преобразователем энергии или без него.
При этом используются следующие системы электропривода.
В случае применения асинхронных двигателей:
1. электроприводы с регулированием сопротивления в цепи ротора асинхронного двигателя и торможением в режиме противовключения (магнитные контроллеры типа ТСА, ТСАЗ, КС, ДКС для механизмов подъема, силовые контроллеры типов ККТ61А, ККТ62А и ТА, ДТА, К, ДК – для механизмов передвижения).
2. электроприводы механизмов подъема с реостатным регулированием и динамическим торможением с самовозбуждением (магнитные контроллеры типов ТДС и КСДБ).
3. электроприводы с тиристорными регуляторами напряжения в цепи статора и дополнительными резисторами в цепи ротора двигателей (типа РСТ)
4. электроприводы с частотным регулированием асинхронных короткозамкнутых двигателей.
В случае применения двигателей постоянного тока:
1. С реостатным регулированием и потенциометрическим включением двигателя (силовые контроллеры типа КВ1О1 для механизмов передвижения моста и типа КВ102 – для механизмов передвижения тележки и ПС, ДПС – для механизмов подъема).
2. С тиристорными преобразователями типов АТК и АТРК.
В крановых электропривода наибольшее распространения получили асинхронные электродвигатели (свыше 90%).
Электроприводы с магнитными контроллерами охватывают диапазон номинальных мощностей двигателей от 11 до 180 кВт для механизмов подъема и от 3,5 до 100 кВт для механизмов передвижения.
Электроприводы механизмов передвижения с магнитными контроллерами выполняются по тому же принципу, что и электроприводы механизмов подъема. Основными отличиями схемы являются реализации симметричных механических характеристик для обоих направлений вращения двигателя и отсутствие характеристик, которые необходимы лишь для спуска грузов.
Рассмотрим некоторые из перечисленных контроллеров.
Контроллер ккт61а
Контроллеры ККТ61А (К - контроллер, К – кулачковый, Т – ток переменный) используются для управления асинхронными двигателями с фазным ротором, мощностью до 30 кВт, работающих в механизмах передвижения. При управлении двигателем посредством этого контроллера оператор должен
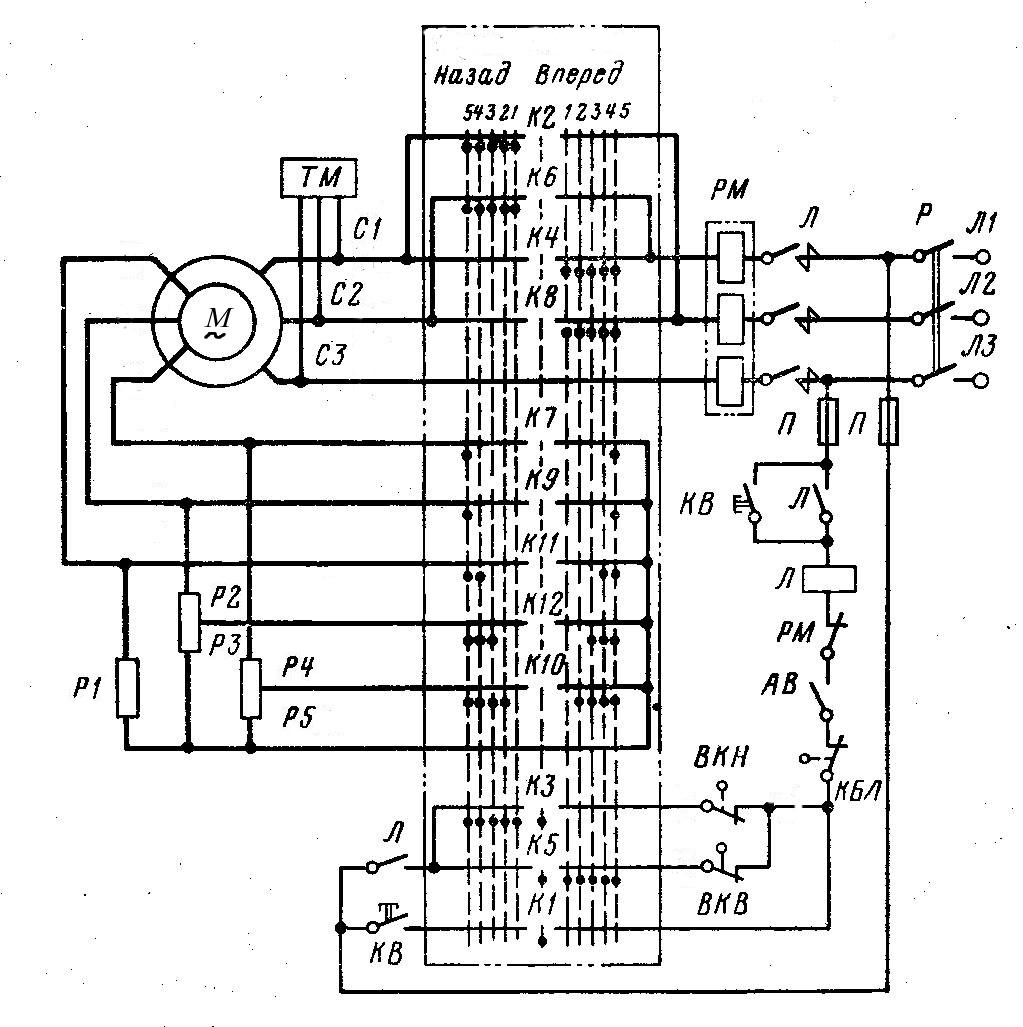
Рисуннок.2.3. Схема кранового электропривода передвижения с силовым контроллером ККТ61А
переводить рукоятку из одного положения в другое с некоторым интервалом времени. В противном случае могут возникнуть недопустимые броски токов, особенно в режимах противовключения.
Принципиальная схема кранового электропривода передвижения с кулачковым контроллером ККТ61А изображена на рисунке 2.3. Питание к двигателю подводится через защитную панель типа ПЗК и контроллер ККТ61. Защитная панель и контроллер представляют собой единое устройство. Контроллер имеет симметричную схему включения относительно нулевого положения. Включение линейного контактора защитной панели Л осуществляется нажатием кнопки включения КВ, когда контакты контроллера находятся в положении ноль. При этом контакты КВ замыкаются и на обмотку контактора Л подается напряжение. Напряжение подастся, если замкнуты контакты реле максимальной защиты РМ, аварийного выключателя АВ и концевого выключателя блокировки люка кабины КБЛ и контакта К1 контроллера. Линейный контактор Л срабатывает и своими силовыми контактами подключает фазы сети Л1 и Л2 к контроллеру, а фазу Л3 к двигателю. Своими дополнительными контактами контактор Л блокирует кнопку включения КВ, которая после отпускания размыкает свои контакты.
Контроллер имеет пять фиксированных рабочих положений для каждого направления движения и одно фиксированное нулевое положение. Данные положения позволяют производить ступенчатые пуск и регулирование частоты вращения, реверс и торможение электродвигателя.
Включение электродвигателя и реверс осуществляются силовыми контактами К2, К4, К6 и К8 (“Назад” – К2 и К6, “Вперед” – К4 и К8), расположенными в цепи статора. Эти контакты изменяют порядок чередования фаз Л1 и Л2 напряжения питания двигателя.
Пуск и регулирование частоты вращения осуществляется коммутацией ступеней реостатов в цепи ротора с помощью контактов К7, К9 – К12. При этом ступени резисторов включаются по несимметричной схеме. Для переключения по симметричной схеме требуются еще три добавочных силовых контакта, что потребует от оператора крана дополнительных усилий при переключениях контроллера, что при частых переключениях приведет к быстрой утомляемости.
Контакты контроллера К1, К3, К5 используются в схеме защитной панели ПЗК.
Рассмотрим работу контроллера, если его рукоятка установлена в положение «Вперед». В этом случае фазы С1 и С2 двигателя подключаются через кулачки К4 и К8. В первом положении контроллера будут включены его контакты К4, К8 и К5. Фаза С1 двигателя подключается к линии Л1 напряжения сети, фаза С2 – к линия Л2, фаза С3 – к линии Л3, минуя контроллер, а в цепь ротора полностью введено сопротивление регулировочного реостата. Одновременно с двигателем получает питание электромагнит механического тормоза ТМ, освобождая тормозной шкив механизма. Двигатель начинает разгоняться по механической характеристике 1 (рисунок 2.4). Характеристика 1 со значением пускового момента М1<Мн является вспомогательной при пуске, исключающей удары при выборе зазоров в кинематической цепи. Поворот рукоятки в положение 2 приводит к замыканию контакта кулачка К10, шунтирующего ступень Р5 реостата. Двигатель продолжит разгоняться по характеристике 2 со значением пускового момента М2. Когда
Рисунок 2.4. Механические характеристики контроллера ККТ61А
частота вращения двигателя будет соответствовать моменту М1, рукоятка контроллера переводится в положение 3. В этом случае замыкаются контакты ещё одного кулачка – К12, который шунтирует ступень реостата Р3 и двигатель переходит на третью механическую характеристику. При переводе рукоятки контроллера в положение 4 замыкаются контакты кулачка К11, шунтирующего ступень реостата Р1. В положении 5 контроллера замыкаются контакты К7 и К9 шунтирующие оставшиеся ступени реостата – Р4 и Р2 соответственно. Двигатель переходит работать на естественную механическую характеристику 5. Для плавного пуска двигателя необходимо переключение контроллера из одного положения в другое производить с интервалом времени, в течение которого момент двигателя достигает момента переключения М1. Контакт К5 подключает к линии Л3 конечный выключатель ВКВ. Если механизм передвижения крана оказываются за пределами рабочей зоны, то размыкается конечный выключатель ВКВ. Линейный контактор Л отключается от сети, его силовые контакты размыкаются, отключая питание от двигателя и от обмотки электромагнита привода механического тормоза ТМ. В результате двигатель затормаживается механическим тормозом и быстро останавливается. После установки контроллера в нулевое положение нажатием кнопки включения КВ линейный контактор Л включается вновь. Когда конечный выключатель ВКВ разомкнут, цепь питания линейного контактора Л сохраняется только в положения “Назад” контроллера через замкнутый контакт конечного выключателя ВКН и контакты К3 контроллера.
Механические характеристики 1, 2, 3, 4, используются не только для пуска, но и для получения пониженной скорости движения механизма. Они обеспечивают реостатное регулирование скорости в небольшом, но достаточном для механизмов передвижения диапазоне. Для механизмов спуска - подъема такие характеристики малопригодны, так как не позволяют осуществлять спуск грузов с малой скоростью.