

Особенности регулирования частоты вращения мощных двигателей электроприводов центробежного типа
Обычно диапазон изменения скорости механизмов не превышает 2:1, поэтому чаще всего используют асинхронные двигатели с фазным ротором либо муфты скольжения. Регулировку частоты вращения осуществляют путем изменения скольжения (т. е. изменяя жесткость механических характеристик). Такое регулирование может осуществляться изменением частоты вращения (вниз от синхронной), которое сопровождается потерями энергии в роторной цепи, например, реостатное регулирование или регулирование изменением напряжения. При регулировании частоты путем изменения скольжения потери в роторной цепи пропорциональны скольжению ΔР2=Мω1s, и их иногда называют потерями скольжения или энергией скольжения. Потери скольжения бесполезно рассеиваются в виде теплоты в обмотках двигателя, в регулировочных реостатах либо муфте скольжения и КПД электропривода понижается. Поэтому регулирование изменением скольжения применяют в механизмах малой и средней мощности, работающих в кратковременном и повторно-кратковременном режимах, например, в крановых механизмах. Насосы, вентиляторы и компрессоры работают в длительных режимах, и их мощность может достигать десятков мегаватт, поэтому при регулировании частоты вращения потери скольжения получаются большими и требуется принимать меры для их уменьшения или использования энергии скольжения для полезной работы механизмов.
В последнее время внедряются способ регулирования, в которых энергия скольжения частично возвращается в питающую сеть, либо преобразуется в полезную энергию двигателя. Обычно такие способы применяются для двигателей средней и большой мощности. Первые схемы, в которых полезно использовались потери скольжения, создавались путем специального соединения ТАД с другими электрическими машинами. Поэтому эти схемы получили название каскадных. В настоящее время существуют схемы, использующие энергию скольжения АД без добавочных вращающихся электрических машин, а с помощью полупроводниковых приборов и трансформаторов. Однако эти схемы также называются каскадными. В общем случае каскадными называют такие схемы включения ТАД, которые, обеспечивая регулирование его скорости, позволяют одновременно полезно использовать энергию скольжения.
В зависимости от вида используемых в каскадных установках устройств различают машинные, машинно-вентильные и вентильные каскады. Машинные каскады в настоящее время используются редко. Рассмотрим работу машинно-вентильных каскадов.
Машино-вентильные каскады, реализованные по схеме, в которой энергия скольжения возвращается на вал рабочего ТАД, называются электромеханическими. Каскады, реализуемые по схеме, в которой энергия скольжения возвращается в питающую сеть, называются электрическими.
На рис.4.4а,б приведены схемы машинно-вентильных электромеханического и электрического каскадов. В роторную цепь рабочего ТАД включается трехфазный выпрямительный мост V. К выводам моста V подсоединен якорь вспомогательного двигателя постоянного тока ВМ независимого возбуждения, ЭДС якоря которого Евм направлена навстречу ЭДС выпрямителя Ев.
В результате такого соединения энергия скольжения переменного тока частотой f2 выпрямителем V преобразуется в энергию постоянного тока, которая поступает на вспомогательную машину ВМ и преобразуется в ней в механическую энергию. Далее в электромеханическом каскаде (рис.4.4а) она возвращается на вал основного АД, а в электрическом каскаде (рис.4.4б) с помощью синхронного генератора G - в питающую сеть переменного тока частотой f1.
Регулирование скорости машинно-вентильных каскадов происходит за счет изменения ЭДС Евм вспомогательного двигателя ВМ, которое осуществляется регулированием его тока возбуждения Iв. Рассмотрим процесс регулирования, скорости в каскадных схемах подробнее.
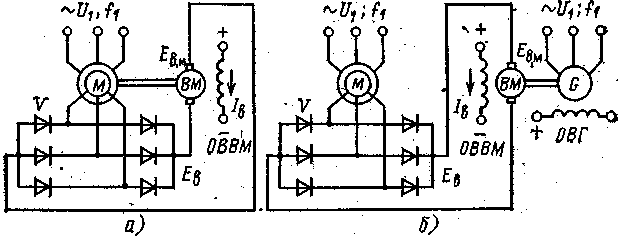
Рис.4.4. Схемы электромеханического (а) и электрического (б) машино-вентильных каскадов
Предположим, что при работе электропривода в установившемся режиме увеличили ток возбуждения Iв вспомогательного двигателя ВМ. Это повлечет за собой увеличение ЭДС Евм и уменьшение выпрямленного тока Id, который определяется выражением
Id=(Eв—Eвм)/RΣ, (4.1)
где RΣ — суммарное сопротивление цепи выпрямленного тока.
Уменьшение Id, и тем самым тока ротора ТАД, вызовет снижение его электромагнитного момента, который станет меньше момента нагрузки Мс. В результате этого скорость двигателя начнет снижаться, а его скольжение и ЭДС роторной обмотки Е2s=Е2s начнут возрастать. Увеличение ЭДС ротора приведет к увеличению тока ротора и тем самым момента ТАД, который вновь станет равным моменту нагрузки, и скорость ТАД перестанет изменяться. ТАД опять будет работать в установившемся режиме, но уже при более низкой скорости.
В схеме рис.4.4а мощность скольжения за вычетом потерь в роторе ТАД, выпрямителе V и вспомогательном двигателе ВМ поступает на вал ТАД в виде механической мощности Рвм от вспомогательного двигателя
Рвм=ΔР2- ΔРп- ΔРвм. (4.2)
Если пренебречь потерями в каскадной схеме, то можно считать, что ТАД передается вся электромагнитная мощность. То есть вспомогательный двигатель ВМ преобразует мощность потерь в роторной цепи ТАД в механическую мощность, которая возвращается рабочему асинхронному двигателю.
В схеме рис.4.4б электромашинный агрегат ВМ-G представляет собой преобразователь энергии постоянного тока, поступающей от выпрямителя V, в энергию переменного тока, отдаваемую в сеть. Регулирование частоты вращения рабочего ТАД осуществляется аналогично схеме рис.4.4а.
На рис. 4.5а,б приведены механические характеристики соответственно электромеханического и электрического каскадов при различных токах возбуждения вспомогательного двигателя ВМ. Для механических характеристик электромеханического каскада рис. 4.5а характерно возрастание максимального
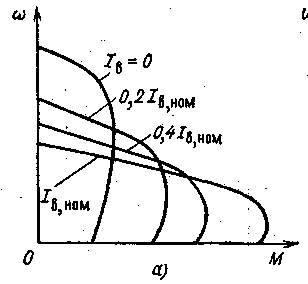
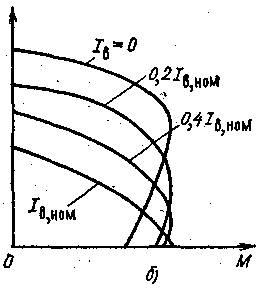
Рис.4.5. Механические характеристики электромеханического (а) и электрического (б) каскадов
момента по мере снижения скорости каскада, поскольку по мере увеличения тока возбуждения ВМ его момент также возрастает. При этом максимальная механическая мощность каскада, определяемая произведением максимального момента на соответствующую этому моменту скорость, при разных токах возбуждения ВМ примерно одинакова. Поэтому электромеханический каскад называют каскадом постоянной мощности.
Механические характеристики электрического каскада приведены на рис.4.5б. При токе возбуждения ВМ, близком к нулю, механическая характеристика каскада близка к естественной характеристике основного ТАД. По мере увеличения тока возбуждения искусственные характеристики располагаются ниже естественных, причем номинальному току возбуждения Iв ном соответствует самая низкая характеристика. Максимальный момент каскада, определяемый ТАД, сохраняется на разных характеристиках примерно постоянным. Поэтому электрический каскад называют каскадом постоянного момента.
В настоящее время в связи с развитием и распространением силовой полупроводниковой аппаратуры электромашинные вращающиеся преобразователи энергии заменяются на статические тиристорные (вентильные) преобразователи. Такие установки называются асинхронно вентильными каскадами.
На рис.4.6 приведена схема асинхронно-вентильного каскада, состоящий из выпрямителя В, трансформатора Т, сглаживающего дросселя L и инвертора И.
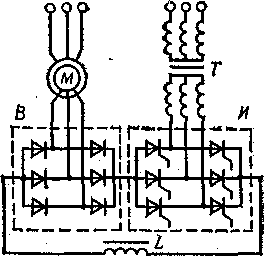
Рис.4.6. Схема асинхронно-вентильного каскада
Напряжение ротора приводного ТАД выпрямляется с помощью трехфазного неуправляемого выпрямителя В. Выпрямленное напряжение ротора подается на инвертор. Инвертор представляет собой преобразователь постоянного тока в переменный ток. Напряжение инвертора можно регулировать, изменяя угол открывания тиристоров. Выпрямленное напряжение ротора действует встречно напряжению инвертора. При увеличении угла открывания тиристоров напряжение инвертора уменьшается, и ток ротора возрастает. Увеличение тока ротора вызовет увеличение момента, и скорость вращения двигателя будет возрастать. С ростом скорости вращения будет уменьшаться скольжение, а с ним и напряжение ротора. Разность напряжений выпрямителя и инвертора уменьшается, в результате уменьшается ток ротора и момент. Когда наступает равновесие моментов нагрузки и двигателя, двигатель начинает вращаться с установившейся большей скоростью. Механические характеристики асинхронно-вентильного каскада аналогичны характеристикам машинно-вентильного электрического каскада, приведенным на рис. 4.5б.