

Особенности электропривода конвейеров
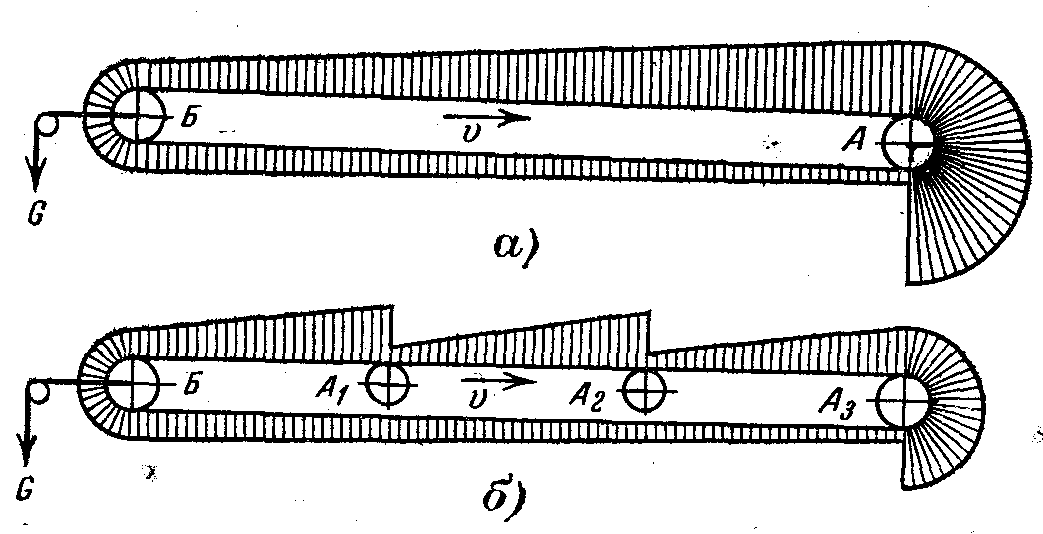
Рис. 5.2. Диаграмма тяговых усилий ленточного конвейера.
а — при однодвигательном электроприводе; б — при многодвигательном электроприводе
Характер изменения скорости в набегающей 1 и сбегающей 2 ветвях конвейера в основном зависит от протяженности ленты (рис. 5.3). При малой длине конвейеров, около нескольких десятков метров, графики изменения скорости ветвей 1 и 2 во времени будут близки друг другу (рис.5.3а). При этом ветвь 2 начнет двигаться с некоторым отставанием по отношению к ветви 1 за счет упругой деформации ленты, однако скорости ветвей быстро выравниваются, но возможно возникновение затухающих колебаний.
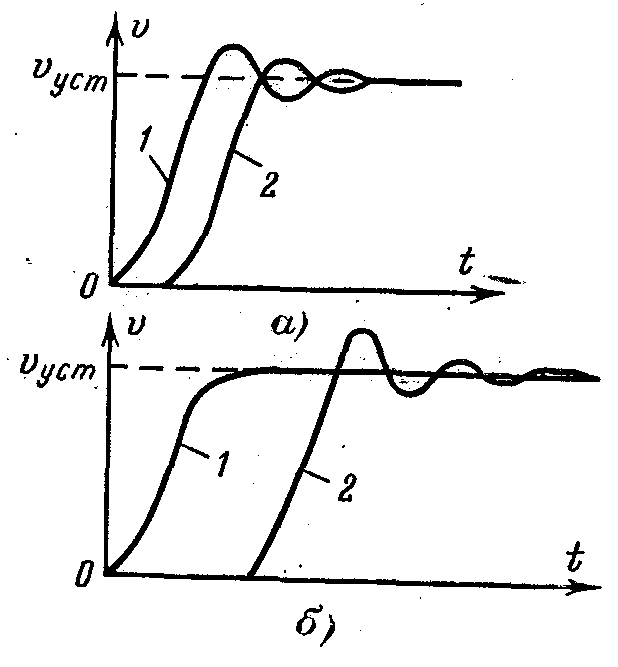
Рис. 5.3. Диаграммы скорости различных участков ленточного конвейера при пуске.
Несколько иначе происходит пуск ленточных конвейеров большой протяженности (несколько сотен метров). В этом случае трогание с места сбегающей ветви 2 конвейера может начаться после того, как приводной двигатель достигнет установившейся скорости (рис. 5.3б). На ленточных конвейерах большой протяженности можно наблюдать отставание начала движения участков ленты на расстоянии 70—100 м от набегающей ветви при установившейся скорости двигателя. При этом в ленте создается дополнительное упругое натяжение, а тяговое усилие к последующим участкам ленты прикладывается рывком. По мере достижения всеми участками конвейера установившейся скорости снижается упругое натяжение ленты. Возврат запасенной энергии может привести к возрастанию скорости ленты по сравнению с установившейся и к ее колебаниям (рис. 5.3б). Такой характер переходного процесса в тяговом органе крайне нежелателен, так как следствием его является повышенный износ ленты, а в некоторых случаях ее разрыв. Поэтому в отношении характера пуска и других переходных процессов в электроприводе ленточных конвейеров выдвигаются жесткие требования по ограничению ускорений системы.
Самым простым способом ограничения ускорений в электроприводе ленточных конвейеров при пуске является реостатное управление (рис. 5.4а). Переход с одной пусковой характеристики на другую обеспечивает плавное ускорение системы. Такое решение задачи часто применяется на ленточных конвейерах, однако оно приводит к значительному увеличению габаритов панелей управления и пусковых реостатов. В некоторых случаях ограничение ускорения системы электропривода осуществляется путем дополнительного торможения вала двигателя в процессе пуска, так как создание дополнительного тормозного момента МТ снижает динамический момент (рис. 5.4б).

Рис.5.4. К способам пуска ленточных конвейеров.
Как видно из приведенных графиков, скорость системы искусственно снижается за счет подтормаживания, вследствие чего снижаются колебания скорости в набегающей и сбегающей ветвях конвейера. По окончании пуска источник дополнительного тормозного момента должен быть отключен от вала двигателя. Ограничение ускорений в системе электропривода может быть достигнуто путем использования обоих способов одновременно, например, реостатного пуска с подключением источника дополнительного тормозного момента. Такой метод находит применение на протяженных односекционных конвейерах, где стоимость ленты определяет основную долю капитальных затрат установки.