

|
|
50 |
|
|
|
Пусть имеется некоторая система взаимодействующих |
|
i |
|
тел (рис. 1.31), где fi – равнодействующая внутренних сил, |
|
fi |
действующих на i-е тело. |
||
|
|||
|
|
Потенциальная энергия взаимодействия тел системы – |
|
|
Рис. 1.31. |
это физическая величина, равная работе, совершаемой си- |
|
|
лами взаимодействия при изменении расположения тел из |
||
|
|
данного состояния в состояние, в котором потенциальная энергия взаимодействия условно принимается равной нулю. Например, в состояние, когда тела будут бесконечно удалены друг от друга.
1.5.6. Закон измнения и сохранения механической энергии системы тел
fi |
|
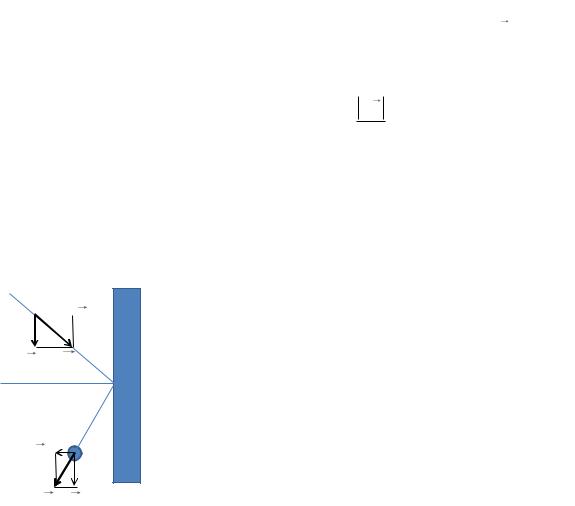
Рассмотрим систему, состоящую из n взаимодейст- |
||||||
|
i |
вующих частиц (рис. 1.32). Силы взаимодействия будем счи- |
||||||
|
|
|||||||
Fi |
fi |
тать консервативными. |
Эта система находится во внешнем |
|||||
|
потенциальном силовом поле. Пусть на частицы действуют |
|||||||
|
|
|||||||
Рис. 1.32. |
также диссипативные силы. Применим к каждой частице |
|||||||
второй закон Ньютона. Для i-й частицы: |
||||||||
|
|
|||||||
|
|
F f |
|
f |
* m |
dvi |
, |
|
|
|
|
|
|||||
|
|
i |
i |
i |
i |
dt |
||
где Fi – сила, действующая со стороны внешнего потенциального поля, fi –
равнодействующая внутренних консервативных сил, fi – диссипативная сила.
Умножим скалярно левую и правую части этого равенства на перемещение i-й частицы dri . Учитывая, что dri vidt , получим:
Fi dri fi dri fi* dri mivi dvi .
Правая часть равенства представляет собой дифференциал кинетической энергии:
|
|
2 |
|
|
Fi dri fi dri fi* dri |
d |
mivi |
. |
|
2 |
||||
|
|
|
Просуммируем такие равенства по всем частицам системы:
51
n |
n |
n |
Fi dri |
fi dri |
fi* dri |
i 1 |
i 1 |
i 1 |
n d mivi2 .
2
i 1
Первое слагаемое есть работа сил внешнего потенциального поля по перемещению частиц системы. Она равна уменьшению потенциальной энергии этих
n
частиц во внешнем поле: Fi dri dWп . Второе слагаемое дает работу
i 1
внутренних сил взаимодействия частиц, равную уменьшению потенциальной
|
|
n |
|
|
|
энергии |
взаимодействия |
fi dri |
dWп,взаим . |
Третье |
слагаемое |
|
|
i 1 |
|
|
|
n
fi* dri A* – работа неконсервативных сил.
i 1
Стоящая в правой части равенства сумма дифференциалов есть дифференциал суммы, который равен изменению кинетической энергии частиц сис-
n |
|
2 |
|
n |
|
2 |
|
|
|
темы, т. е. d |
mivi |
|
d |
mivi |
|
dWк . Таким образом, приходим к тому, |
|||
2 |
2 |
||||||||
i 1 |
|
|
i 1 |
|
|
|
|||
что
|
|
dW dW |
|
A* dW |
, |
|
||
|
|
п |
п,взаим |
|
к |
|
||
|
|
A* dW dW dW |
|
, |
||||
|
|
|
к |
|
п |
п,взаим |
|
|
|
|
|
или |
|
|
|
||
|
|
A* d (W W W |
) . |
|
||||
|
|
|
|
к п п,взаим |
|
|
||
Выражение в скобках является полной механической энергией частиц |
||||||||
системы |
W. |
Если нет неконсервативных |
сил |
fi , то A* 0 и |
||||
dW d(Wк |
Wп |
Wп,взаим ) 0, cледовательно, |
|
|
|
|||
W const.
Сформулируем закон сохранения механической энергии системы тел.
Полная механическая энергия системы тел, на которые действуют только консервативные силы, остаѐтся постоянной.
Если на тела системы действуют неконсервативные силы, безразлично, внутренние или внешние, то работа этих сил равна изменению механической энергии системы тел.

52
1.5.7. Потенциальная кривая
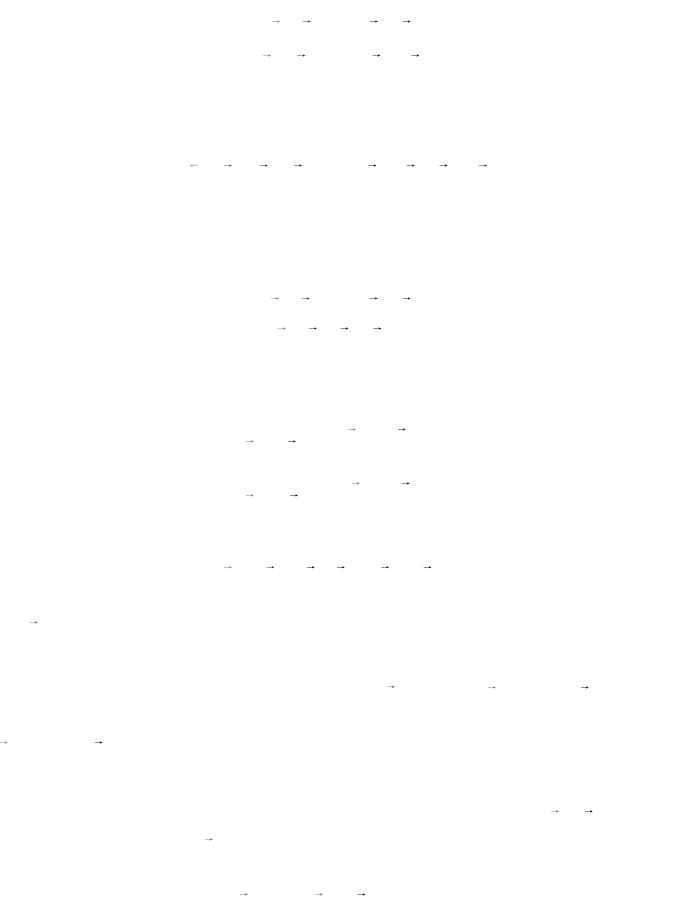
График зависимости потенциальной энергии тела от координат называют потенциальной кривой. Например, потенциальная кривая гравитационного взаимодействия изображена на рис. 1.27. Пусть диссипативных сил нет,
|
WП |
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
Wk |
|
|
|
|
F |
WП |
|
0 |
|
|
|
||
x1 |
x2 |
x3 x4 x5 |
x |
||
|
|||||
|
|
|
Рис. 1.33. |
|
а потенциальная энергия тела зависит только от координаты х каким-либо произвольным образом (рис. 1.33). Проанализируем эту кривую. Полная механическая энергия тела W представляет собой сумму потенциальной и кинетической энергий. Чем меньше потенциальная энергия тела, тем больше кинетическая. В областях х < x1 и х3 < x < x5, согласно рисунку, потенциальная энергия тела больше полной энергии. Такая ситуация невозможна, и эти области в классической физике недоступны для движения тела. Область между точками х3 и x5 называют потенциальным барьером. Пройти над барьером тело может, только имея полную энергию, большую высоты барьера W > Wп. На рис. 1.33 при заданной полной энергии W тело имеет две области, доступные для движения: от x1 до х3 и от х5 до бесконечности. Область x1 х3 называют потенциальной ямой. Кинетическая энергия, а, значит, и скорость, тела на краях ямы в точках x1 и х3 равна нулю. Максимальную скорость тело имеет в точке х2, соответствующей дну потенциальной ямы.
Определим теперь направление силы потенциального поля, действующей на тело в разных областях пространства. Воспользуемся формулой связи силы и потенциальной энергии F gradWп. В нашем одномерном случае
Fx dWdxп .
53
В области координат от нуля до x2 функция Wп(х) убывает, ее производная отрицательна, проекция вектора силы на ось абсцисс положительна, сила направлена вправо. Аналогично, на участке х2 х4 сила направлена влево, и на участке от х4 до бесконечности опять вправо. На рисунке направление сил показано стрелками. Видим, что в потенциальном поле силы, действующие на тело, направлены в сторону такой точки, где потенциальная энергия тела минимальна.
В экстремумах функции – точках х2 и х4 производная потенциальной энергии по координате, а, следовательно, и сила, действующая на тело, равны нулю. Такие точки называют положениями равновесия. При отклонении тела от положения х2, возникает возвращающая сила, стремящаяся вернуть тело к положению равновесия. Точки, подобные х2, называют точками устойчивого равновесия. Силы, действующие в окрестности точки х4, напротив, стремятся удалить тело от положения равновесия. Такое равновесие будет неустойчи-
вым.
1.5.8. Соударение тел
Наиболее ярко действие законов сохранения импульса и механической энергии проявляется при столкновении тел. Если обусловленное столкновением взаимодействие тел длится очень короткое время, то такое столкновение называют ударом. Во время соударения тела изменяют свой импульс. Пусть изменение импульса некоторого тела при ударе равняется p. Тогда, согласно второму закону Ньютона, средний модуль силы, действующей на это тело при ударе, равен
F p .t
Поскольку время, за которое совершается удар, очень мало, то силы взаимодействия тел при ударе всегда велики, что дает основание рассматривать систему соударяющихся тел как замкнутую, пренебрегая всеми другими силами.
 vn v v
vn v v
v
n
v v
Будем рассматривать только такое столкновение тел, при котором их скорости направлены вдоль прямой, проходящей через центры масс этих тел. Такой удар называют
центральным.
Можно выделить два предельных случая удара – аб-
солютно упругий и абсолютно неупругий удар. Степень уп-
ругости удара характеризуется коэффициентом восстанов-

54
ления скорости ε. Пусть тело налетает на неподвижную преграду (рис. 1.34). Тогда коэффициент восстановления скорости равен отношению нормальных к преграде компонент скорости тела после и до удара:
|
|
|
|
|
|
|
|
|
|
|
|
|
ε vn . |
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
n |
|
|
|
|
Для абсолютно упругого удара ε =1. Кинетическая энергия тел во время |
|||||||
|
удара частично или полностью преобразуется в потенциальную энергию уп- |
|||||||
|
ругой деформации тел, а затем вновь восстанавливается в форме кинети- |
|||||||
Рис. 1.34. |
ческой. Потерь механической энергии при абсолютно упругом ударе не |
|||||||
|
происходит. Тела полностью восстанавливают свою форму и размеры. |
|||||||
|
Действуют законы сохранения импульса и механической энергии. В природе |
|||||||
|
нет абсолютно упругих тел, значит абсолютно упругим столкновение тел |
|||||||
|
можно считать лишь приближенно. |
|
|
|
|
|||
|
При абсолютно неупругом ударе ε = 0. Деформации тел носят неупру- |
|||||||
|
гий характер. При абсолютно неупругом ударе тела слипаются и движутся |
|||||||
|
дальше как единое целое, имея общую скорость. Закон сохранения механиче- |
|||||||
|
ской энергии не выполняется, т. к. кинетическая энергия тел при ударе час- |
|||||||
|
тично или полностью преобразуется в тепловую энергию. Законом сохране- |
|||||||
|
ния импульса при неупругом ударе пользоваться можно. |
|||||||
|
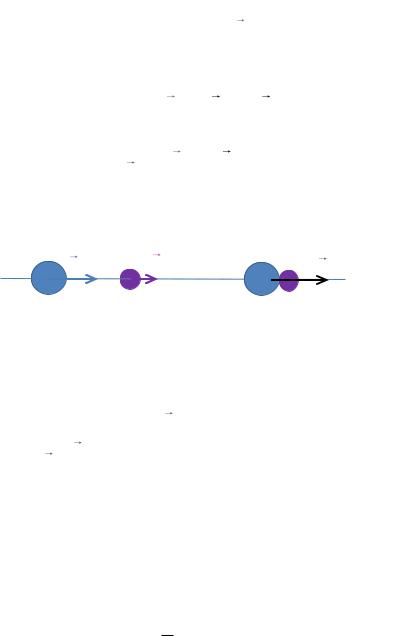
Рассмотрим соударение двух тел массами m1 |
и m2 |
и вычислим их скоро- |
|||||
|
|
|
|
|
|
|
|
|
|
сти после удара v1 |
и v2 , если начальные скорости заданы и равны v1 и v2 . |
||||||
|
Сначала выполним расчет для случая абсолютно упругого удара (рис.1.35). |
|||||||
|
Запишем закон сохранения импульса и закон сохранения механической |
|||||||
|
(в данном случае кинетической) энергии. Для энергии двойку в знаменателе |
|||||||
|
всех слагаемых сразу опустим. |
|
|
|
|
|
||
|
|
m1 v1 |
m2 v |
m1 |
v |
m2 |
|
|
|
|
|
|
2 |
|
1 |
|
v2 |
|
|
|
а |
|
|
|
б |
|
|
|
|
Рис. 1.35. |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
m1v1 m2v2 m1v1 |
m2v2 |
|
|||
|
|
|
2 |
2 |
2 |
2 |
|
|
|
|
|
m1v1 |
m2v2 |
m1v1 |
m2v2 |
|
|
В обоих равенствах соберем слагаемые с индексом 1 слева, а с индексом 2 справа:
55
|
|
|
v2 |
|
|
m1 v1 v |
m2 v2 |
|
|||
2 |
2 |
|
2 |
2 |
|
m1 v1 |
v1 |
m2 v2 |
|
v2 |
|
или, расписав разность квадратов двух переменных,
m1 v1 |
v1 |
v1 |
v1 |
m2 |
v2 |
v2 |
v2 + v2 . |
|
|
|
|
|
|
|
|
Перепишем верхнее равенство. Также запишем результат деления нижнего равенства на верхнее. Получим
|
|
|
|
v2 |
|
m1 v1 v1 |
m2 v2 |
||||
|
|
|
v2 . |
|
|
v1 v1 |
v2 |
|
|||
Выразив скорости первого и второго шаров после удара, найдем, что
|
|
v1 2 |
m1v1 |
m2v2 |
|
|
|
|
|
v1 |
|
m1 m2 |
, |
||||
|
|
|
|
|
|
|||
|
|
v2 2 |
m1v1 |
m2v2 |
|
|
||
|
v2 |
m1 m2 |
|
. |
||||
|
|
|
|
|
|
|||
Или, иначе |
|
|
|
|
|
|
|
|
|
v1 2vC , |
|
|
|
|
|
||
v1 |
v2 v2 2vC , |
|||||||
где vC вектор скорости центра масс системы шаров. Из полученных соотношений видно следующее:
|
|
|
|
|
|
|
|
m1 |
m2 |
|
|
|
|
если |
второе тело до удара неподвижно ( v2 0 ), то v1 |
|
|
|
v1 |
, а |
|||||
m1 |
m2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
2m1 |
|
|
|
|
|
|
|
|
||
v2 |
m1 |
m2 |
v1 |
. При m1>m2 |
первый шар будет двигаться в первоначальном на- |
|||||||
|
|
|
|
|
|
|
|
|
|
|||
правлении. При m1<m2 он отскочит в противоположном направлении. Если
массы шаров равны, то второй шар приобретает скорость первого (v v ), а
2 1
первый останавливается (v 0 ) – происходит обмен скоростями;
1
если масса второго тела очень велика (массой m1 можно пренебречь по
сравнению с m2), и при этом v 0 то v v , то есть налетающий шар ―от-
2 1 1
ражается‖ от преграды, а его скорость не меняется по величине.
Теперь рассмотрим случай абсолютно неупругого удара (рис. 1.36).
56
В этом случае для расчета скорости тел v после удара можно применить только закон сохранения импульса, согласно которому
m1 m2 v m1v1 m2v2
и
|
|
v |
m1v1 m2v2 |
. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
m1 m2 |
|
|
|
m1 |
v1 |
m |
v2 |
m1 m |
v |
||
|
2 |
2 |
|||||
|
|
|
|
|
|
||
|
|
а |
|
|
|
б |
|
|
|
|
Рис. 1.36. |
|
|
||
Из полученного соотношения можно заключить, что при равенстве масс
тел
если второе тело до удара покоится (v2 0 ), то скорость первого тела после удара делится пополам: v v21 ;
при встречном движении с одинаковыми по величине скоростями после удара тела остановятся.
Найдем теперь, какое количество кинетической энергии переходит в тепловую форму при неупругом ударе:
Wк Wк,до Wк,после 12 (m1v12 m2v22 m1 m2 v2 )
Подставив значение общей скорости шаров после удара, раскрыв скобки и приведя подобные, получим:
|
m1m2 |
|
2 |
|
|
Wк |
|
|
(v1 v2 ) |
. |
|
2 m m |
|
||||
|
1 |
2 |
|
|
|
Отсюда видно, что возможны два случая, когда вся кинетическая энергия тел переходит в тепловую форму:
тела равной массы движутся навстречу друг другу с одинаковыми скоростями;