


23
прямая, проведенная через любые две точки тела при движении остается параллельной самой себе. Чтобы описать поступательное движение твердого тела, достаточно описать движение одной его точки.
Плоским движением твердого тела называют такое движение, при котором траектории точек тела лежат в параллельных плоскостях. Движение тела в этом случае полностью определяется движением одного из его сечений в какой-либо из параллельных плоскостей. Частным случаем плоского движения является вращательное движение. При вращательном движении точки тела движутся по окружностям, центры которых неподвижны и лежат на од-
Рис.1.14. ной прямой, называемой осью вращения. Любое плоское движение можно представить в виде суммы, т. е. наложения двух движений – поступательного и вращательного. Примером плоского движения является качение цилиндра по плоскости.
При вращении твердого тела его положение полностью определяется углом поворота φ по отношению к плоскости отсчѐта, проходящей через ось вращения (рис. 1.14). Для всех точек тела углы поворота φ, а также угловые скорости и угловые ускорения будут одни и те же. Соответствующие им векторы и направлены вдоль оси вращения. Для описания вращения твердого тела достаточно задать зависимость угла поворота от времени
t .
При равномерном вращении угловая скорость постоянна, а угол поворота вычисляется по формуле 0 t . Здесь 0 угол поворота в начальный момент отсчета времени, 0 . При равноускоренном вращении постоянным является угловое ускорение, а угловая скорость и угол поворота подчиняются кинематическим формулам равноускоренного движения
по окружности: t , |
|
t |
t2 |
|
2 2 |
0 |
, |
0 t , |
0 . |
||
0 |
0 |
2 |
2 |
2 |
|
|
|
|
1.3.Динамика материальной точки
Динамика ставит вопрос о причине изменения скорости тела. Динамика основывается на 3-х законах Ньютона — фундаменте классической механики. Эти законы взаимосвязаны, и их необходимо рассматривать как одно целое.
1.3.1.Первый закон Ньютона
Вразличных системах отсчета законы природы, в том числе законы движения имеют, вообще говоря, различный вид. Естественно возникает во-

24
прос об отыскании такой системы отсчета, в которой законы природы выглядели бы наиболее просто.
Простейший вид движения – движение свободного тела, т. е. тела, не подвергающегося каким-либо внешним воздействиям. Абсолютно свободных тел в природе не существует. В природе существуют квазисвободные тела, т. е. такие тела, воздействие на которые скомпенсировано. Первый закон Ньютона сформулирован для этих тел. В современной формулировке он звучит следующим образом:
Существуют такие системы отсчета, называемые инерциальными, в которых свободные или квазисвободные тела сохраняют свою скорость, т.е. состояние покоя или прямолинейного равномерного движения.
Таким образом, первый закон Ньютона утверждает существование инерциальных систем отсчета. Как же отыскать такие системы? Если в некоторой системе отсчета свободное тело имеет постоянную скорость, то эта система отсчета – инерциальная. Правда, более точные измерения могут показать, что скорость тела все-таки изменяется, и для этой степени точности система отсчета не будет являться инерциальной. Таким образом, вопрос о том, можно ли считать систему отсчета инерциальной, решается исходя из требований физической задачи. В природе не существует абсолютно инерциальных систем отсчета. Систему отсчета, связанную с поверхностью Земли, часто можно считать инерциальной, если движение интересующих нас тел происходит недолго, на небольших расстояниях. Заметить неинерциальность системы отсчета в этом случае трудно.
1.3.2. Второй закон Ньютона
Второй закон Ньютона говорит о том, как изменяется движение тела при наличии внешнего воздействия. Мера воздействия одного тела на другое характеризуется векторной физической величиной, называемой силой F . Второй закон Ньютона является обобщением следующих опытных фактов:
В инерциальных системах отсчета ускорение тела вызывается нескомпенсированными воздействиями других тел. Опыт показывает, что при воздействии на одно и то же тело разной силой ускорение, сообщаемое телу, прямо пропорционально силе a ~ F .
Если же действовать на тела одинаковой силой, можно видеть, что тела разной массы получают разные ускорения, т. е. не все тела одинаково быстро изменяют свою скорость.
25
Способность тела сохранять скорость своего движения называют инертностью тела. Более инертные тела медленнее изменяют свою скорость при внешнем воздействии. Физическую величину, являющуюся мерой инертности тел при их поступательном движении, называют массой m.
Тело, обладающее большей массой, получит меньшее ускорение при действии одной и той же силы. Опыт показывает, что массы тел и приобретаемые ими ускорения находятся в обратно пропорциональной зависимости.
Полагая одно из тел эталонным, имеем: m aэт , тогда масса исследуемого mэт a
тела m aaэт mэт . Принимая массу эталонного тела за единицу измерения мас-
сы, получаем способ измерения массы любого тела по приобретаемому им ускорению.
Единицей измерения массы в системе СИ является 1 кг. Прототип 1 кг массы, находящийся в Международном бюро мер и весов в Севре под Парижем, представляет собою цилиндр из сплава платины (90%) и иридия (10%) диаметром около 39 мм и такой же высоты. Масса 1 л воды приблизительно равна 1 кг.
Сделаем обобщение и сформулируем второй закон Ньютона:
a F, a |
1 |
a k |
F |
. |
|
|
|
. |
|||
|
m |
m |
|||
|
|
||||
В инерциальной системе отсчета ускорение, сообщаемое телу, прямо пропорционально силе, действующей на тело, и обратно пропорционально массе этого тела. Ускорение направлено в сторону действия силы.
Полагая коэффициент пропорциональности k 1, тем самым мы вводим единицу измерения силы. Тогда
a mF или F ma.
За единицу силы 1 Ньютон принимают такую силу, которая, действуя |
|||||
на тело массой 1 кг, сообщает ему ускорение 1 м/с2 ( F 1 |
кг м |
= 1Н ). Если |
|||
|
|||||
|
|
|
с2 |
||
на тело действует несколько сил, то a |
F1 F2 |
Fn |
, или |
||
m |
|
||||
|
|
|
|
||
|
|
26 |
F1 F2 |
Fn ma . Векторную сумму сил, действующих на тело |
|
|
F1 F2 |
Fn называют равнодействующей. Ускорение тела всегда сона- |
F |
||
правлено с равнодействующей силой, т.е. F ma.
Формулировка второго закона динамики, данная Ньютоном, не содержала понятия ускорения. Вместо этого Ньютон пользовался термином количества движения. Сейчас эту физическую величину называют импульсом тела. Импульс равен произведению массы тела на его скорость:
p mv .
Это векторная величина, направленная в сторону движения тела.
Если F ma , а ускорение тела a ddtv , тогда F m ddtv . Введем массу тела под знак дифференциала:
|
|
F |
|
d mv |
. |
|
|
|
|
|
|||
|
|
|
|
dt |
||
|
|
|
|
|
||
Учитывая, что mv |
p , получим: |
|
|
|||
|
|
F |
dp |
p . |
||
|
|
dt |
||||
|
|
|
|
|
|
|
Равнодействующая сила равна скорости изменения импульса тела, т.е. импульсу, сообщаемому телу за 1 с.
Эта формулировка второго закона Ньютона является более общей.
В случае, если равнодействующая сила постоянна, F |
p |
или |
|
t |
|||
|
|
F t p . Величину F t называют импульсом силы. Таким образом, импульс равнодействующей силы равен изменению импульса тела.
1.3.3. Третий закон Ньютона
Третий закон Ньютона описывает взаимодействие тел и формулируется следующим образом: в инерциальных системах отсчета силы, с которыми взаимодействуют две любые материальные точки, равны по величине, противоположны по направлению и действуют вдоль прямой, их соединяющей.
m1 |
f |
f |
m2 |
f |
f |
21 |
|
12 |
|
21 |
12 |
|
27
Силы взаимодействия f12 и f21 приложены к разным телам и не могут ком-
Рис. 1.15. |
пенсировать друг друга (рис.1.15). |
|
1.3.4. Преобразования Галилея. Классический закон сложения cкоростей.
Механический принцип относительности
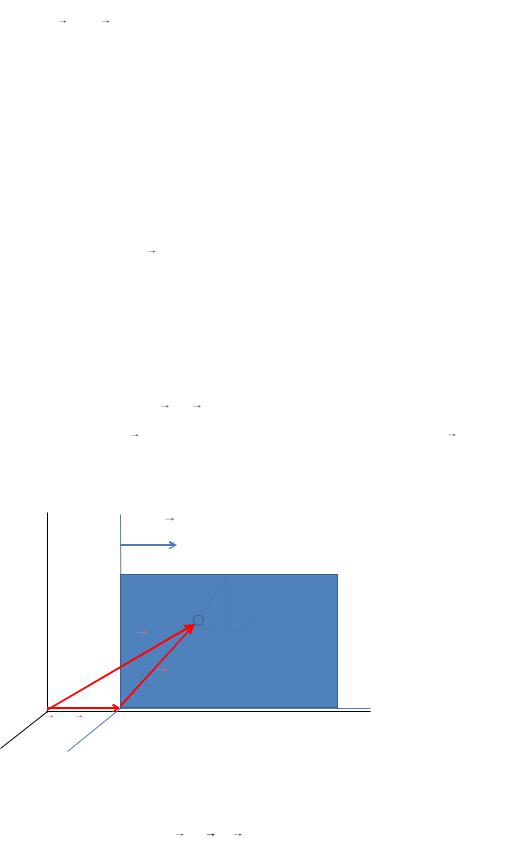
Рассмотрим движение материальной точки М в двух инерциальных системах отсчѐта ( K и K ). Пусть система K движется по отношению к системе K с постоянной скоростью v0 в направлении оси Ox (рис. 1.16). Примером будет движение математического маятника в каюте равномерно плывущего корабля по отношению к этой каюте (система K ) и по отношению к берегу реки (система K ).
Условимся, что в момент времени t = 0 начала координат систем отсчѐта O и O совпадали. Через время t положение точки O в системе K будет определяться радиус-вектором r0 v0t . Положение точки М в системе K определяется радиус-вектором r , а в системе K - радиус-вектором r (см. рис. 1.16). Если принять, что время в обеих системах отсчета течет одинаково, то:
|
y |
y |
v0 |
|
|
|
|
|
|
|
K |
K |
|
|
|
|
M |
||
|
|
|
|
|
|
|
r |
|
|
|
|
|
r |
x |
|
O |
|
|
|
|
|
|
x |
|
|
r0 v0t |
|
||
|
O |
|
||
z |
z |
|
|
|
|
|
|
Рис. 1.16. |
|
|
|
|
r r v0t |
|
|
|
|
|
t. |
|
|
|
t |
|
28
Эти соотношения получили название преобразований Галилея. В координатной форме:
x' x v0t
y' y
z' zt' t
Чтобы перейти от системы K к системе вания:
r v0t r илиt t
K , применим обратные преобразо-
x x' v0t' |
|
|
|
y y' |
|
|
|
z z' |
. |
t t' |
|
|
|
Дифференцируя радиус-вектор по времени, получим классический закон преобразования скорости точки при переходе от одной инерциальной системы отсчѐта к другой – закон сложения скоростей:
|
|
|
|
|
dr |
v0 |
|
dr |
|
|
|
|
|
|
|
|
|
|
|
dt |
dt |
или |
v = v0 + v |
. |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
Здесь v |
dr |
– скорость точки М в системе отсчѐта K (абсолютная ско- |
||||||||||||
dt |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dr |
– скорость точки М |
в системе |
K |
|
(относительная скорость), v0 |
||||||||
|
||||||||||||||
рость), v |
dt |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
– скорость перемещения системы K по отношению к системе K (переносная |
||||||||||||||
скорость). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференцируя скорость v по времени, |
с учѐтом того, что v0 const., |
|||||||||||||
получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a a ,
т. е. ускорение точки одинаково во всех инерциальных системах отсчѐта,
или, как говорят, ускорение инвариантно относительно преобразований Галилея.
Согласно Ньютону масса тела – величина постоянная, не изменяющаяся при его движении, т. е. масса является инвариантной величиной во всех инер-