

11
мент времени, еѐ скорость и ускорение. Действительно, взяв производную ра- диус-вектора по времени, найдѐм вектор скорости
v drdt dxdt i dydt j dzdt k ,
v vxi vy j vz k ,
где vx dxdt , vy dydt , vz dzdt – проекции вектора скорости на оси координат.
Применяя теорему Пифагора, определим модуль вектора скорости
v 
 vx2 v2y vz2 .
vx2 v2y vz2 .
Аналогичным образом определим вектор мгновенного ускорения, взяв производную вектора скорости по времени
a ddtv ddtvx i ddtvy j ddtvz k , a axi ay j az k ,
где ax ddtvx , ay ddtvy , az ddtvz – проекции вектора ускорения на оси коорди-
нат. Модуль полного ускорения определится как
a
 ax2 ay2 az2 .
ax2 ay2 az2 .
1.1.3.Движение по окружности
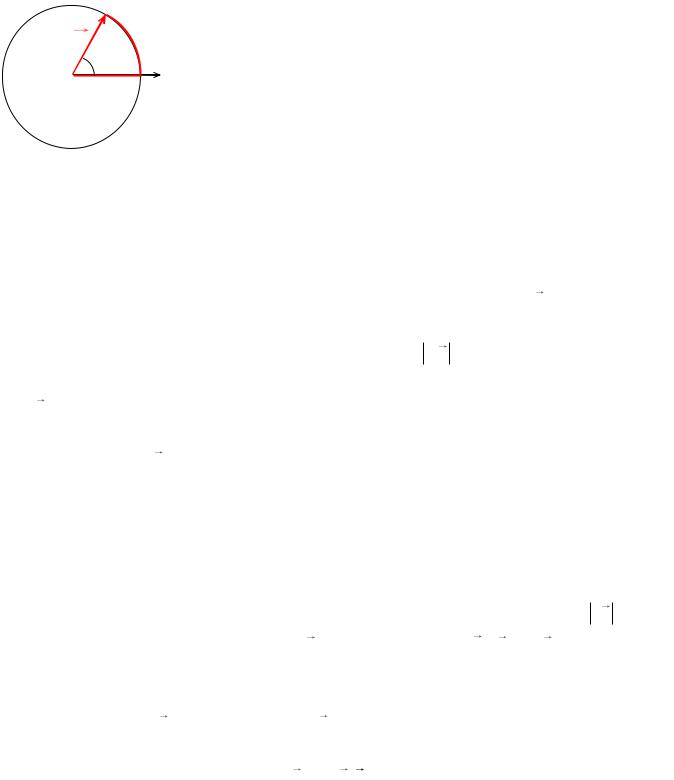
Если материальная точка движется по окружности, то еѐ положение при заданном радиусе окружности R вполне определяется углом , который составляет радиус-вектор r , проведѐнный из центра окружности, с осью отсчѐта Оx (рис. 1.6). В данном случае начало отсчета координат выбрано в центре окружности, и модуль радиус-вектора r равен радиусу окружности (r = R). Зависимость (t) полностью задаѐт движение материальной точки по окружности радиуса R. Угол поворота измеряется в радианной мере.
12
Углом в
r
O R
Рис. 1.6.
1 радиан называют такой центральный угол, длина дуги |
||||
|
которого s равна еѐ радиусу R. Приблизительно такой |
|||
s |
угол показан на рис. 1.6. Чтобы определить произ- |
|||
вольный угол в радианной мере, надо узнать, сколь- |
||||
|
||||
|
ко раз радиус R укладывается в дуге окружности: |
|||
|
x |
|||
|
|
s |
. Единица измерения радиан не имеет размерно- |
|
|
|
|||
|
|
R |
||
|
сти. Угол в 1 оборот равен 2 радиан. Чтобы опреде- |
|||
|
лить дугу окружности, надо еѐ радиус умножить на |
|||
|
центральный угол в радианной мере: |
|||
|
|
|
s R . |
|
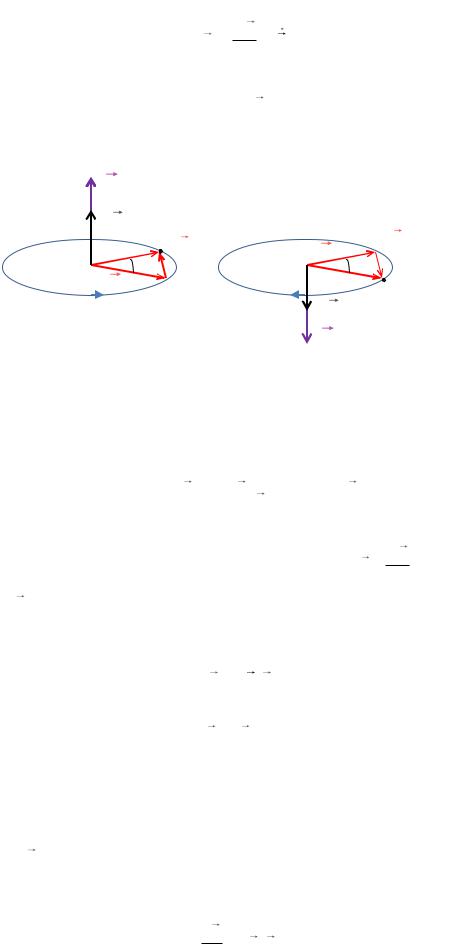
Сопоставим бесконечно малому углу поворота d вектор d , направленный перпендикулярно плоскости вращения и связанный с направлением вращения правилом правого винта или буравчика, d d (рис. 1.7). Если материальная точка движется по окружности против часовой стрелки, то вектор d направлен вдоль оси вращения вверх (рис. 1.7, а) в сторону поступательного движения винта. Если материальная точка движется по часовой стрелке, то вектор d направлен вдоль оси вращения вниз (рис. 1.7, б).
Длина дуги окружности
ds Rd .
Это соотношение выражает связь между линейным и угловым путем материальной точки при ее движении по окружности. Учитывая, что ds dr ,
получим, что модуль перемещения |
|
dr |
|
rd . |
Векторы d , r и dr взаимно |
|
|
||||
|
|
|
|
|
|
перпендикулярны и образуют правовинтовую систему (рис. 1.7), значит, вектор перемещения можно представить в виде векторного произведения векторов углового пути d и радиус-вектора r (см. Приложение):
dr d ,r . |
(1.1) |
Быстроту движения материальной точки по окружности характеризует угловая скорость. Вектор угловой скорости равен
13
d dt
и направлен в ту же сторону, что и d (рис. 1.7). Модуль вектора угло-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|||
|
|
|
|
|
|
dr |
|
|
|
|
|
r |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
||||
|
|
|
|
|
|
ds |
|
|
|
|
|
|
ds |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
a |
|
|
|
|
Рис. 1.7. |
б |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
вой скорости |
d |
|
, а единица измерения |
|
рад. |
. |
|
Разделив обе части |
|||||||||||||||
|
|
|
|
||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
||||
|
|
|
|
|
|
d r |
|
|
|
|
|
|
dr |
|
|
|
|
|
|||||
уравнения (1.1) на dt, получим |
|
d |
, r |
. Здесь |
– скорость движения |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
dt |
dt |
|
|
|
|
|
dt |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
материальной точки по траектории (линейная скоростьv , ddt – вектор угло-
вой скорости . Таким образом, получаем связь линейной и угловой скорости точки при движении по окружности в векторной форме:
v , r
Так как угол между векторами и r равен 90° , а r R , то по модулю
v R.
Если начало отсчета координат выбрать не в центре окружности, а в произвольной точке на оси вращения, то при движении точки по окружности радиус-вектор r будет вращаться по конической поверхности (рис. 1.8) или, как говорят, прецессировать. Уравнение прецессии имеет вид:
drdt , r ,

|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
вектор угловой скорости прецессии ра- |
|||||||||||
R |
|
|
|
диус-вектора r . По модулю правая часть ра- |
||||||||||||
|
|
|
венства равна r sin , где – угол между |
|||||||||||||
O |
|
|
|
|
векторами |
r |
и |
. |
Учитывая, |
что |
||||||
|
|
|
|
|
r sin R, |
получим |
|
, r |
|
R v |
– |
мо- |
||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
дуль линейной скорости материальной точки, |
|||||||||||
Рис. 1.8. |
|
|
|
вращающейся по окружности радиуса R. |
|
|||||||||||
|
|
|
|
|
|
|||||||||||
По уравнению вида |
db |
|
c,b можно судить, что вектор b |
прецессирует с |
||||||||||||
|
||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
угловой скоростью, равной вектору c . |
|
|
|
|
|
|
|
|
|
|||||||
Быстроту изменения угловой скорости характеризует вектор углового |
||||||||||||||||
ускорения , равный производной угловой скорости по времени: |
|
|
||||||||||||||
|
|
|
|
|
|
d |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Представим вектор угловой скорости в виде e |
, (где e |
– |
еди- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ничный вектор в направлении вектора ). Расписав производную произведения, получим:
|
d ( e ) |
|
d |
e |
de |
. |
|
|
|
||||
|
dt |
|
dt |
|
dt |
|
|
|
|
||||
Если ось вращения не меняет положения в пространстве, то e не изменяется, и второе слагаемое равно нулю. Тогда
|
|
|
|
|
|
|
|
|
d |
e . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
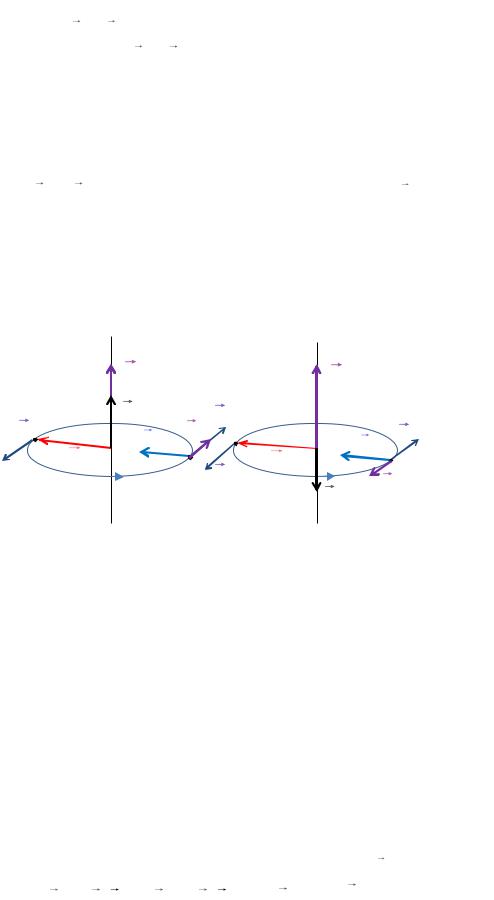
Вектор углового ускорения |
направлен вдоль оси вращения (рис. 1.9). |
|||||||||||||||||
Он сонаправлен c , еcли модуль угловой скорости увеличивается ( |
d |
|
0 ) и |
|||||||||||||||
dt |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
противоположен , если модуль угловой скорости уменьшается ( |
d |
0 ). |
||||||||||||||||
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
||
|
|
|
|
|
d |
|
, а единица измерения |
рад. |
|
|
|
|||||||
Модуль углового ускорения |
|
|
|
|
|
|
. |
|
|
|||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
с2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||||
15
Если векторы и сонаправлены или противоположны, то же самое можно сказать и о векторах v и a (рис. 1.9, а, б). В случае, изображенном на рис. 1.9 (a) угловая и линейная скорости движения увеличиваются – движение ускоренное. На рис. 1.9 (б) и v , и уменьшаются – движение замедленное.
Выразим через угловые характеристики движения компоненты линей-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dv |
|
|
|
ного ускорения a |
и a |
n |
. Модуль тангенциального ускорения |
|
a |
|
|
|
. Учиты- |
||||||||||
|
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
вая, что v R , получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
d |
|
|
|
|
R . |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
a |
|
|
|
|
R или |
a |
|
|
|
|
|
||||
|
|
|
|
dt |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
v |
a |
||
|
an |
|
|
R |
v |
|
|
|
|
a |
|
|
|
|
|
|
v |
R |
|
an |
|
a |
|
|
|
|
б |
|
|
|
|
Рис. 1.9.
Модуль нормального ускорения an v2 Rv v. Иначе
R R
an 2 R2 2 R.
R2
Тангенциальную и нормальную компоненты ускорения можно выразить через угловые характеристики движения и в векторной форме. Если взять начало отсчета координат в центре окружности, по которой движется материальная точка, то радиус-вектор этой точки совпадет с радиусом окружности R. Примем в этом случае для радиус-вектора обозначение R (рис. 1.9). Тогда в векторной форме a , r , а an , v или an 2 R.
Если угловая скорость движения не изменяется, то каждый полный оборот материальной точки по окружности совершается за одно и то же вре-