

29
циальных системах отсчѐта, а, следовательно, и сила, действующая на тело ( F ma ma ), также инвариантна относительно преобразований Галилея.
Следовательно, справедлив принцип относительности Галилея, согласно которому во всех инерциальных системах отсчета законы механики проявляют себя одинаковым образом. Это означает, что никакими механическими опытами, проводимыми «внутри» данной инерциальной системы, нельзя установить, покоится эта система отсчѐта или движется. Во всех инерциальных системах отсчѐта свойства пространства и времени одинаковы.
1.4.Движение системы тел
1.4.1.Закон изменения и сохранения импульса системы тел
Совокупность материальных точек или физических тел, участвующих в каком-либо едином взаимодействии, называют механической системой тел. Силы взаимодействия, действующие между телами системы, называют внутренними, а силы, действующие на тела системы со стороны тел, не входящих
всистему, называют внешними.
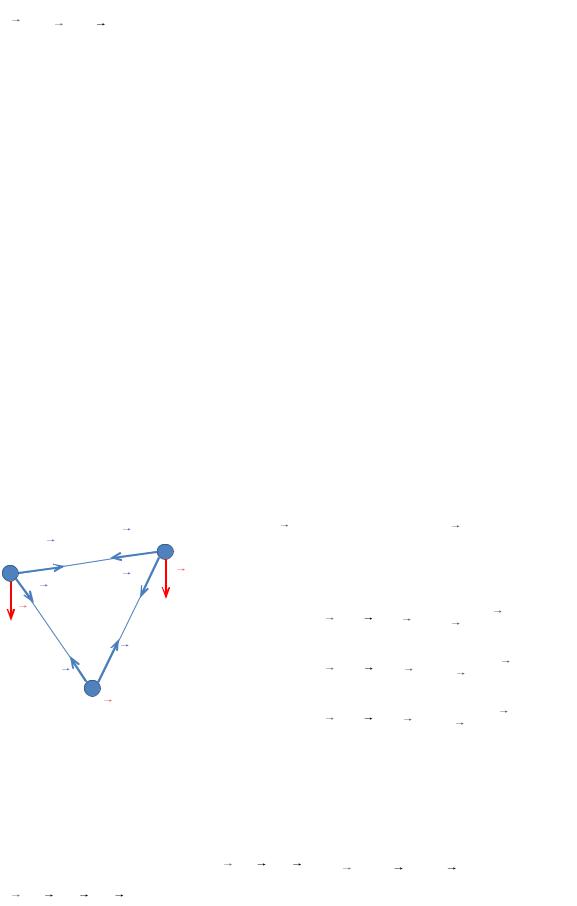
Вкачестве примера рассмотрим систему, состоящую из трѐх тел (рис.
1 f13 |
|
f |
31 |
3 |
|
|
|||
|
|
|
|
|
f12 |
|
f |
32 |
F3 |
|
|
|
||
|
|
|
|
|
F1 |
|
|
|
|
|
2 |
f23 |
|
|
f |
|
|
|
|
21 |
|
|
|
|
 F2
F2
Рис. 1.17.
1.17). Пусть на тела системы действуют как внутренние ( f ), так и внешние ( F ) силы. Применим к каждому телу системы второй закон Ньютона:
|
f13 |
F1 |
m1a1 |
dp1 |
||||||
f12 |
|
|
|
|
|
|||||
|
dt |
|||||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
dp2 |
|||
f21 |
f23 |
F2 |
m2a2 |
|
|
|
|
|
||
|
dt |
|||||||||
|
|
|
|
|
|
|
||||
|
f32 |
F3 |
m3a3 |
|
|
dp3 |
||||
f31 |
|
|
|
|
|
|||||
|
|
dt |
|
|||||||
|
|
|
|
|
|
|
|
|
||
Сложим почленно части этих уравнений. Векторная сумма внутренних сил равна нулю согласно третьему закону Ньютона. Тогда
F1 F2 F3 m1a1 m2a2 m3a3.
F1 F2 F3 F – равнодействующая внешних сил. Т.е.

30
F m1a1 m2a2 m3a3 ,
равнодействующая внешних сил равна сумме произведений масс тел на соответствующие ускорения. Если все тела системы движутся с одним ускорением a , то в этом случае равнодействующая внешних сил равна произведению
массы всей системы mсист.= m1+m2+m3 на ускорение системы F mсист.a . Учитывая, что сумма производных импульсов тел равна производной
суммы, также можно записать, что:
F1 F2 F3 dtd ( p1 p2 p3 ).
Назовем импульсом механической системы векторную сумму импульсов всех тел, входящих в систему: pсист p1 p2 p3 , и запишем закон изме-
нения импульса механической системы тел: равнодействующая внешних сил равна скорости изменения импульса системы:
F d pсист
dt
Закон справедлив для любого количества тел в механической системе. Если на механическую систему не действуют внешние силы (F 0) , то
такую систему называют замкнутой или изолированной. В этом случае
d pсист 0 ,
dt
т. е. pсист const. Таким образом, приходим к закону сохранения импульса: во всякой изолированной системе тел векторная сумма импульсов тел, входящих в систему, есть величина постоянная.
Закон сохранения импульса также выполняется в неизолированных механических системах в том случае, если внешние силы, действующие на систему, скомпенсированы.
1.4.2. Центр инерции и центр масс системы тел
31
Пусть имеется система тел, импульс которой
|
n |
pсист p1 p2 |
pn pi . |
|
i 1 |
Тела, входящие в систему, будем условно считать материальными точ-
ками.
Центром инерции системы тел называют такую точку, скорость перемещения которой, умноженная на массу всей системы, дает импульс всей системы. Исходя из этого определения, запишем:
vC (m1 m2 |
mn ) m1v1 m2v2 |
mnvn |
|
или |
|
rC (m1 m2 |
mn ) m1r1 m2r2 |
mnrn , |
где rC радиус-вектор центра инерции системы тел, а r1, r2 , , rn – радиусвекторы каждого тела. Тогда
rC (m1 m2 mn ) m1r1 m2 r2 mn rn ,
а радиус-вектор центра инерции
rC |
|
m1r1 m2r2 |
mnrn . |
||||
m1 |
m2 |
|
mn |
|
|||
|
|
||||||
Центром масс системы тел называют точку, в которую сжалась бы система покоящихся тел, подверженная только силам всемирного тяготения (при условии, что тела могли бы сжиматься до бесконечно малых размеров). В однородном поле тяготения центр масс и центр инерции системы тел совпадают.
1.4.3. Уравнение движения центра масс
Понятие центра масс позволяет придать уравнению F d pсист , выра- dt
жающему второй закон Ньютона для системы тел, иную форму. Для этого достаточно представить импульс системы как произведение массы системы на скорость ее центра масс:
32
|
|
|
|
|
|
|
|
|
pсист |
(m1 m2 mn ) vC |
mсист vC |
|
m |
d vC |
|
|
|
Тогда F |
. |
|
|
||
|
|
|
|||
|
сист |
dt |
|
|
|
Получили уравнение движения центра масс, согласно которому центр масс любой системы тел движется так, как если бы вся масса системы была
сосредоточена в нем, и к нему были бы приложены все внешние силы. Если
dvC 0 , а, значит, vC const. , т. е. центр dt
масс (инерции) замкнутой системы покоится или перемещается равномерно и прямолинейно. Другими словами, внутренние силы взаимодействия тел не могут придать какое-либо ускорение центру масс системы тел и изменить скорость его движения.
Скорость центра масс определяется полным импульсом механической системы, и перемещение центра масс характеризует движение этой системы как единого целого.
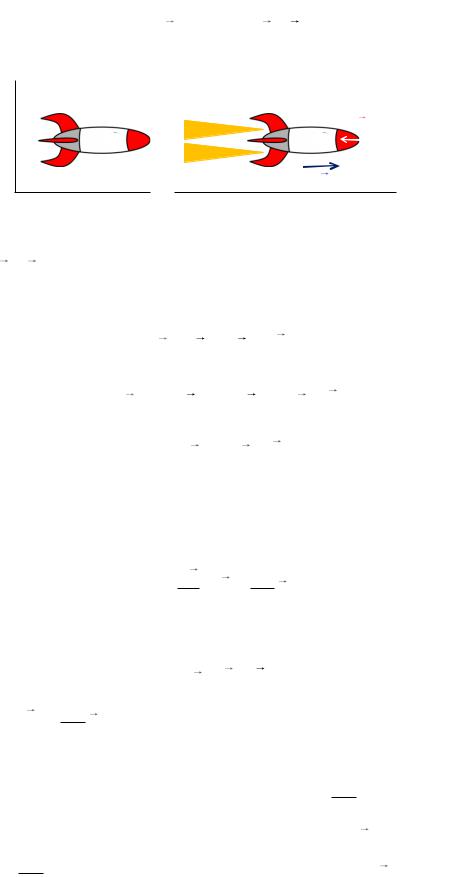
1.4.4. Движение тела переменной массы
Движение некоторых тел происходит благодаря изменению их массы. Рассмотрим движение тела переменной массы на примере ракеты, движущейся благодаря выбросу потока газов, образовавшихся при сгорании топлива. Пусть в некоторый момент отсчета времени t скорость ракеты относительно Земли равна v . Выберем такую систему отсчета, которая в данный момент времени движется относительно Земли равномерно и прямолинейно с такой же скоростью v . В этой системе отсчета ракета в момент времени t покоится. Переменная масса ракеты в этот момент времени равна m. Скорость потока газов относительно ракеты примем постоянной и равной u (рис. 1.18). Пусть на ракету действует постоянная сила F , например, сила сопротивления атмосферного воздуха.
Запишем изменение импульса системы dp для бесконечно малого промежутка времени dt. В момент времени t+dt масса ракеты равна m+dm. Так как dm < 0, то отделяемая масса равна – dm. Скорость ракеты за время dt получит приращение dv . Изменение импульса ракеты dp1 равно
dp1 m dm dv.
Изменение импульса отделяемой массы:
33
|
dp2 dm dv u . |
||
t |
|
|
t dt |
|
|
||
m |
|
dm |
F |
|
|
m dm |
|
|
|
|
dv |
|
|
|
|
Рис.1.18.
Здесь dv u – скорость потока газов в выбранной нами системе отсчета. Согласно второму закону Ньютона для системы тел
dp dp1 dp2 Fdt ,
откуда следует, что
mdv dmdv dmdv dmu Fdt
и
mdv dmu Fdt .
Разделив на dt, приходим к уравнению динамики переменной массы,
впервые полученному российским физиком Мещерским:
m ddtv F dmdt u ,
или
ma F Fр .
Величину Fр dmdt u называют реактивной силой. Эта сила тем больше,
чем больше скорость изменения массы. Для тела постоянной массы реактив-
ная сила равна нулю. Если масса тела уменьшается ( dmdt 0 ), то реактивная сила направлена в сторону, противоположную скорости u . Если масса тела увеличивается ( dmdt 0 ), то реактивная сила сонаправлена с u.