

61
1.6.2. Принцип эквивалентности
Тот факт, что силы инерции, как и силы тяготения, пропорциональны массам тел, приводит к следующему важному заключению. Представим себе, что мы находимся в некоторой закрытой лаборатории и не имеем возможности наблюдать внешний мир. Допустим, кроме того, что мы не знаем, где находится лаборатория: в космическом пространстве или, скажем, на Земле. Замечая, что все тела независимо от их массы падают в лаборатории с одинаковым ускорением, мы не можем на основании только этого факта установить, чем вызвано это ускорение – полем тяготения, ускоренным поступательным движением самой лаборатории или, наконец, обеими этими причинами вместе. Никакие опыты по свободному падению тел в такой лаборатории не могут отличить однородное поле тяготения от однородного поля сил инерции.
Эйнштейн высказал предположение, что вообще никакими физическими опытами невозможно отличить однородное поле тяготения от однородного поля сил инерции. Это предположение, возведенное в постулат, составляет содержание так называемого принципа эквивалентности сил тяготения и сил инерции: все физические явления в однородном поле тяготения происходят совершенно так же, как и в соответствующем однородном поле сил инерции.
Глубокая аналогия между силами инерции и силами тяготения послужила отправным пунктом при построении Эйнштейном общей теории относительности или релятивистской теории гравитации.
Любую механическую задачу можно решить как в инерциальной, так и в неинерциальной системах отсчета. Выбор диктуется или постановкой вопроса, или стремлением получить решение возможно более простым путем.
1.6.3. Сила тяжести и вес
Силой тяжести тела mg называется сила, равная геометрической сумме гравитационной силы тяготения тела к Земле Fгр и центробежной силы инер-
ции Fцб , обусловленной суточным вращением Земли: mg Fгр Fцб . Линия
действия силы тяжести на средних широтах не проходит через центр Земли (рис.1.40). Сила тяжести тела совпадает с силой гравитационного тяготения только на полюсах Земли, так как там центробежная сила равна нулю. Наибольшее отличие силы тяжести от силы тяготения наблюдается на экваторе,
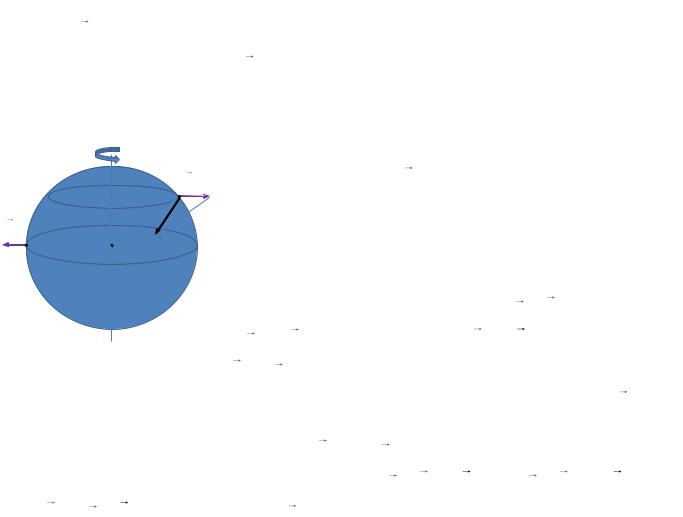
62
где сила Fцб достигает максимального значения и направлена в сторону, про-
тивоположную направлению Fгр .
Вес тела P – это сила, с которой тело действует на опору или подвес.
Рассмотрим тело массой m, находящееся на площадке подъѐмника. При не- |
|||||||
|
|
|
|
|
подвижной площадке (рис. 1.41, а) на тело дейст- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
вуют сила тяжести mg и сила реакции опоры N , |
||
|
|
Fгр |
|
|
Fцб |
|
|
|
|
|
|
равная по модулю весу тела P . Вес тела P при- |
|||
|
|
|
Fгр |
|
|||
Fцб |
|
|
|
ложен к площадке и направлен вниз, а сила реак- |
|||
Fгр |
|
|
|
||||
|
|
|
mg |
|
|
|
|
|
|
|
|
|
ции опоры |
N действует на тело и направлена |
|
|
|
|
|
|
вверх. Так как тело находится по отношению к |
||
|
|
|
|
|
площадке в состоянии покоя, то mg N 0 , т. е. |
||
|
|
|
|
|
mg N . |
Учитывая, что P N , |
получим: |
P mg . Вес равен силе тяжести.
При движении площадки с ускорением a связанная с ней система отсчета является неинерциальной, и в ней должно учитываться действие силы инерции Fин ma . Так как в системе отсчета, связанной с площадкой, тело неподвижно, то mg Fин N 0 , mg Fин N , т. е. P mg Fин . Если ускорение a направлено вверх (рис. 1.41, б), то тело прижимается к площадке с силой
P mg ma m(g a).
Эта сила больше, чем сила тяжести. Говорят, что тело находится в состоянии перегрузки. Перегрузки возникают во время разгона или торможения в скоростном транспорте, при выводе на орбиту космических кораблей. Если ускорение направлено вниз (рис. 1.41, в), то тело прижимается к площадке с силой
P mg ma m(g a) ,
меньшей, чем сила тяжести. Скорость площадки с телом в обоих случаях может быть направлена как вверх, так и вниз.