

57
второе тело до удара покоится, и его масса намного больше, чем у первого тела (массой m1 по сравнению с m2 можно пренебречь).
1.6.Неинерциальные системы отсчета
1.6.1. Силы инерции
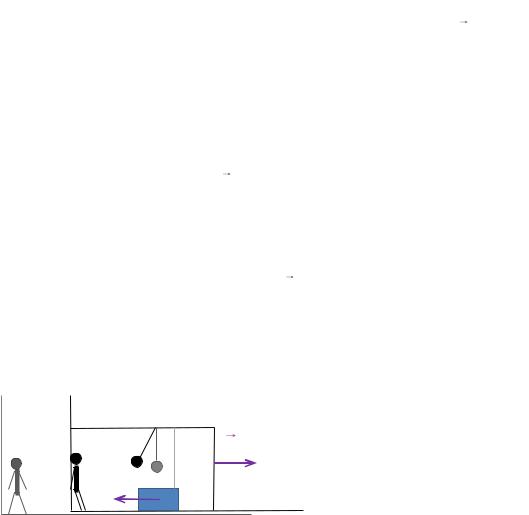
Законы Ньютона выполняются только в инерциальных системах отсчета. Системы отсчета, движущиеся относительно инерциальных систем с ускорением, называют неинерциальными. В неинерциальных системах отсчета законы Ньютона несправедливы. Рассмотрим, например, две системы отсчета: первая инерциальная система (K) связана с поверхностью Земли, вторая неинерциальная система ( K ) с вагоном, который движется с ускорением a0 (рис. 1.37). Когда вагон был в состоянии покоя, посередине его на идеально гладком полу находился ящик, а к потолку был подвешен на нерастяжимой нити маятник. На ящик действуют силы тяжести и реакции опоры, которые компенсируют друг друга, и, согласно первому закону Ньютона, он находится в состоянии покоя. То же самое можно сказать и о вертикально висящем маятнике. При движении вагона с ускорением a0 для наблюдателя системы K ящик и маятник спустя короткий промежуток времени по-прежнему будут оставаться в состоянии покоя (движется только вагон), а, следовательно, попрежнему справедлив первый закон Ньютона. Для наблюдателя системы K ящик будет скользить к наблюдателю с ускорением a0 , а маятник отклонится от вертикального положения, т. е. первый закон Ньютона нарушается. Возникает такой эффект, как если бы на все тела системы стали действовать силы, направленные против ускорения системы. Для неинерциальных систем
y K y |
K |
a0
x x
Рис. 1.37.
отсчета законы динамики можно применить, если кроме сил, обусловленных взаимодействием тел друг с другом, ввести в рассмотрение силы, называемые
силами инерции.
58
В простейших случаях неинерциальная система отсчета может или двигаться поступательно, или вращаться по отношению к инерциальной системе (условно неподвижной).
Рассмотрим три различных возможных случая:
тело находится в неинерциальной системе отсчета, движущейся поступательно;
тело покоится во вращающейся системе отсчета;
тело движется во вращающейся системе отсчета.
Если неинерциальная система отсчета движется поступательно с ускорением a0 , то законы Ньютона действуют в ней в том же виде, как и для инерциальных систем отсчета, только наряду с силами взаимодействия тел необходимо учитывать силы инерции
Fин ma0 .
Вектор a0 представляет собой так называемое переносное ускорение. Переносным ускорением называют ускорение в системе K той точки пространства системы K , в которой в данный момент времени находится рассматриваемое тело. При поступательном движении системы K все точки этой системы обладают одним и тем же переносным ускорением a0 . Сила инерции направлена противоположно переносному ускорению системы и пропорциональна массам тел.
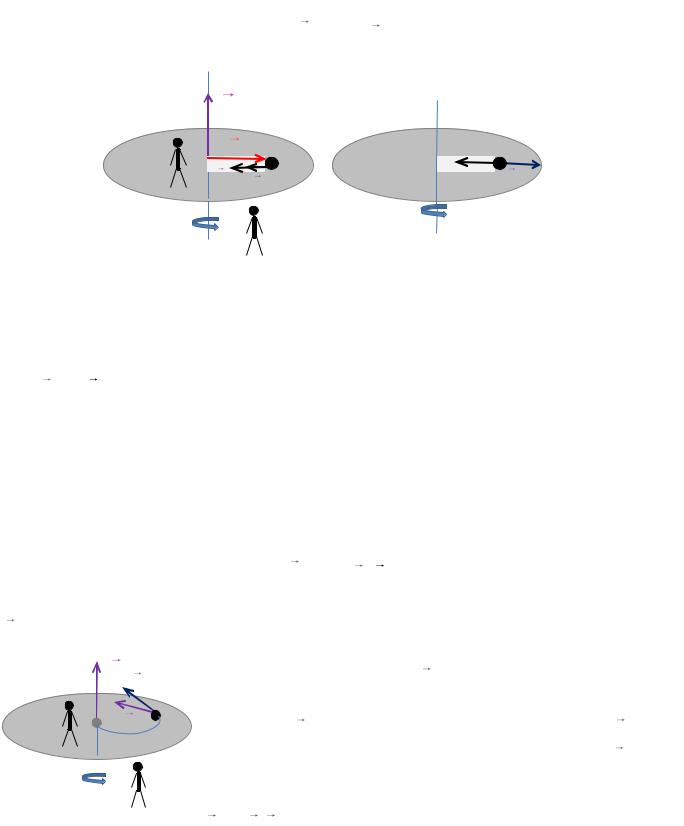
Теперь рассмотрим вращательное движение системы K (допустим, связанной с диском) с постоянной угловой скоростью вокруг вертикальной оси, проходящей через центр диска (см. рис. 1.38). Каждая точка этой системы с позиции наблюдателя системы K обладает переносным центростремительным ускорением an 2r. Вместе с диском вращается надетый на спицу шарик, соединенный с центром пружиной. Шарик занимает на спице такое положение, при котором сила натяжения пружины Fупр с позиции на-
блюдателя системы K равна по второму закону Ньютона произведению массы на ускорение.
Fупр man m 2r ,
r радиус-вектор, проведенный к шарику из центра диска.
59
Относительно системы отсчета, связанной с диском, шарик покоится. Это можно объяснить тем, что в системе K , кроме упругой силы, действует сила инерции
|
|
|
F |
m 2r , |
|
|
|
|
цб |
|
|
|
|
|
|
|
|
|
r |
|
|
K |
|
K |
|
|
|
|
|
Fупр |
a |
|
F |
Fцб |
|
|
|
n |
упр |
||
|
K |
|
|
|
|
|
|
|
Рис. 1.38. |
|
|
называемая центробежной силой. Она направлена вдоль радиуса от центра диска, и для покоящегося шарика в системе K выполняется условие равновесия Fупр Fцб 0 . Центробежные силы действуют на тела во вращающихся
системах отсчета независимо от того, покоятся эти тела или движутся.
При движении тела относительно вращающейся системы отсчета, кроме центробежной силы инерции, на него действует еще одна сила инерции, называемая силой Кориолиса или кориолисовой силой. Кориолисова сила, действующая на тело массой m, определяется формулой:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fк 2m v , . |
|
|
|||
|
|
|
|
|
|
|
|
K |
|
v – скорость материальной точки во вращающейся системе ( рис. 1.39). |
|||||||||
|
|
|
|
При перемещении материальной точки М в |
|||||
|
|
v |
системе K |
|
со |
|
|
|
|
|
|
|
|
скоростью v с позиции наблюдателя |
|||||
|
|
|
a |
системы K возникает дополнительное кориолисово |
|||||
K |
|
|
ускорение |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
aк . Оно вызвано прецессией скорости v |
|||||
|
|
|
|
из-за вращения системы K с угловой скоростью , |
|||||
|
|
|
|
||||||
|
|
|
|
а также изменением переносной линейной скорости |
|||||
|
|
K |
|
v0 , r |
при перемещении материальной точки М |
||||
|
|
|
|||||||
|
Рис. 1.39. |
||||||||
|
от одной точки пространства системы K к другой. |
||||||||
|
|
|
|
||||||
|
|
|
|
|
|
|
60 |
|
|
d , r |
|
|
|
– ускорение, обусловленное прецес- |
|
|
|
|
|
||||
То есть aк , v |
dt |
|
, где , v |
||||
|
|
|
|
|
|
|
|
|
Вектор |
d |
, r |
, обусловленный изменением переносной |
|||
|
|
|
|||||
сией вектора v . |
|
dt |
|||||
|
|
|
|
|
|
||
скорости при перемещении материальной точки М от одной точки простран-
|
|
|
d , r |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
|
||||||
ства системы K |
к другой, равен |
|
|
|
|
|
, |
|
|
|
|
|
|
|
||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
. Второй закон Ньютона в инер- |
|||||||||||
а кориолисово ускорение равно aк 2 , v |
||||||||||||||||||||
циальной системе K по отношению к телу, находящемуся во вращающейся |
||||||||||||||||||||
системе K' , будет выглядеть как |
|
|
|
|
2 |
r |
|
|
|
|
|
|
|
|
, где F – равно- |
|||||
F m |
|
2 , v |
|
a |
|
|||||||||||||||
действующая сил, действующих на тело со стороны других тел, a – ускорение движущегося тела относительно вращающейся системы K' . Раскрыв
круглые |
|
|
|
|
|
|
скобки |
в |
правой |
части |
равенства, |
запишем |
|
|
2 |
r |
|
|
|
|
. Чтобы представить второй закона Ньютона в |
||||||
F m |
|
|
2m , v ma |
||||||||||
системе |
|
|
|
|
K' |
, это |
уравнение |
перепишем |
в |
следующем виде |
|||
2 |
r |
|
|
|
|
|
|
т. е. в этой системе кроме сил, действующих на |
|||||
F m |
|
|
2m v , ma , |
||||||||||
тело со стороны других тел, действуют силы инерции: |
F m 2r' |
центро- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
цб |
|
бежная сила, |
Fк 2m v', |
– сила Кориолиса. |
|
|
|
||||||||
Направление силы Кориолиса удобно определить по правилу левой руки: четыре вытянутых пальца направим по вектору движения тела v' , в ладонь впивается вектор угловой скорости вращения системы K' , тогда большой вытянутый палец ладони укажет на направление силы Кориолиса. Вследствие суточного вращения Земли с угловой скоростью , направленной вдоль оси Земли с юга на север, на движущиеся тела действует сила Кориолиса. Поезд при движении вдоль меридиана в северном полушарии оказывает на правый рельс большее давление, чем на левый. Действием силы Кориолиса объясняется подмывание реками в северном полушарии правого, а в южном – левого берегов. Другим примером влияния сил Кориолиса на движение тел у поверхности земного шара являются: отклонение свободно падающих тел от вертикали и поворот плоскости качаний маятника. Силы Кориолиса необходимо учитывать при расчете траекторий полета снарядов и искусственных спутников Земли.