

34
Теперь рассмотрим случай, когда внешних сил нет. В проекции направление движения ракеты уравнение Мещерского примет вид:
m ddtv dmdt u
или
dv dmm u.
Интегрируя это выражение, получим:
v dv u dmm u lnm C.
Константу интегрирования C определим из начальных условий. Если в начальный момент отсчета времени t = 0 скорость ракеты равна нулю, а масса m m0 , то 0 u ln m0 C и C u ln m0. Тогда
v u ln m0 ulnm; v u ln mm0 .
Это соотношение носит имя российского ученого К.Э. Циолковского и лежит в основе ракетостроения.
1.5. Силовое поле
|
|
|
Силовое поле – это особая форма материи, свя- |
|
|
|
зывающая частицы вещества в единые системы и |
|
|
|
передающая с конечной скоростью действие одних |
r |
|
F |
частиц на другие. В дальнейшем силовое поле мы |
|
|
||
|
|
будем называть просто полем. Взаимодействия меж- |
|
|
|
|
|
O |
|
|
|
|
Рис. 1.19. |
|
ду удалѐнными телами осуществляется через созда- |
|
|
ваемые ими поля: гравитационные, электромагнит- |
|
|
|
|
ные. Например, так осуществляется притяжение планет к Солнцу, взаимодействие заряженных частиц и т. д.
35
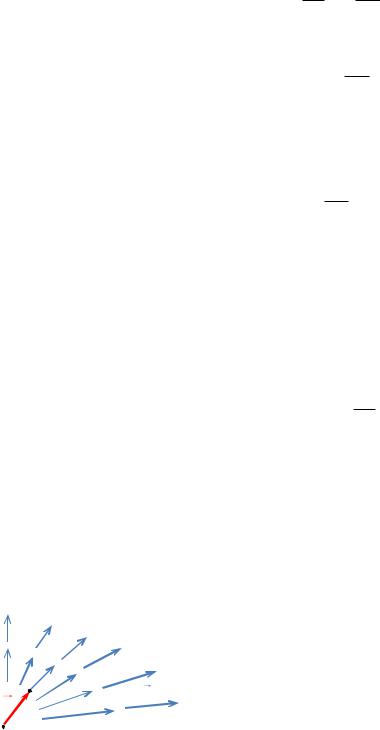
Силовое поле описывается векторной функцией координат пространства (радиус-вектора). Каждой точке пространства сопоставляется вектор силы, который действовал бы на материальную частицу, помещѐнную в исследуемую точку пространства (рис. 1.19).
1.5.1.Центральное и однородное силовые поля
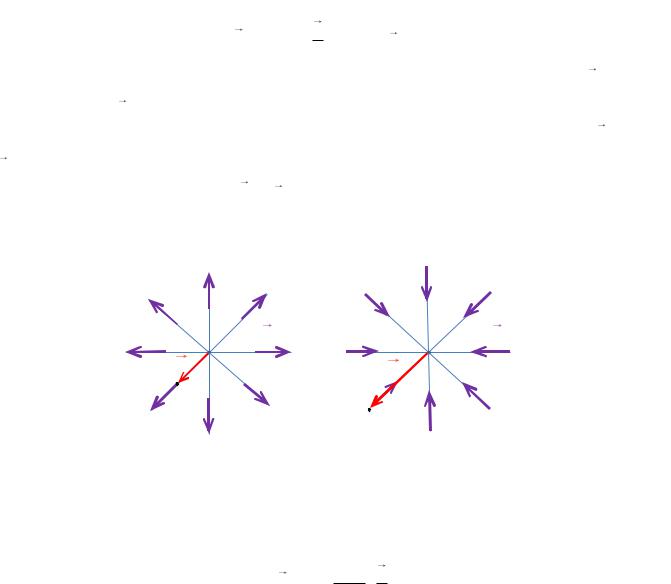
Вполе центральных сил на материальную точку действуют силы, которые всюду направлены вдоль прямых, проходящих через одну и ту же неподвижную точку – центр сил (рис. 1.20). Величина этих сил зависит только от
расстояния r до центра сил: F Fr (r) rr . Здесь r – радиус-вектор, проведѐн-
ный из центра сил в исследуемую точку поля, Fr (r) – проекция силы F на радиус-вектор r , зависящая только от модуля радиус-вектора r. Если материальная точка отталкивается от центра сил, то Fr r 0, так как векторы F и r сонаправлены (рис. 1.20, а). Если материальная точка притягивается к центру сил, то Fr r 0 , так как F и r направлены в противоположные стороны
(рис.1.20, б).
F |
F |
r |
r |
a |
б |
Рис. 1.20.
Примером центрального поля является гравитационное поле Земли, для которого:
F G Mmr2 rr ,
где G – гравитационная постоянная (G = 6,67·10-11 Н м2/кг2), M – масса Земли, m – масса тела, r – расстояние от центра Земли до исследуемой точки поля.

36
Проекция силы F на радиус-вектор r : Fr r G Mmr2 , а модуль силы
F r G Mmr2 .
Количественной мерой поля тяготения является напряженность
E mF
С учетом закона всемирного тяготения E G Mr2 rr , а модуль напряженности
EG Mr2 .
Уповерхности Земли расстояние r от точек поля до центра сил равно
радиусу Земли R, а модуль напряженности E G RM2 . Если не учитывать вра-
щение Земли, сила гравитации равна силе тяжести F mg , тогда
E mgm g ,
т. е. вектор напряженности равен вектору ускорения свободного падения, а модуль ускорения свободного падения у поверхности Земли приближенно ра-
вен g G RM2 . Другим примером поля центральных сил является электроста-
тическое поле точечного заряда.
Упругие силы также являются центральными. Действительно, если один конец пружины закрепить шарнирно в центре сил, а другой конец пружины располагать по различным точкам пространства, то в этом случае
F k r rr , где r величина деформации пружины. В одномерном случае
Fx kx , где k коэффициент жесткости пружины, х – величина деформации пружины (если x > 0, пружина растя-
|
нута, если x < 0, пружина сжата). |
|
|
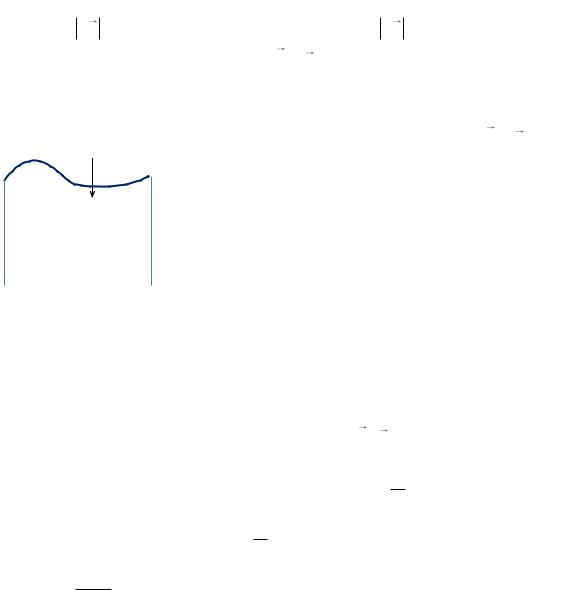
В однородном силовом поле на материальную части- |
|
Рис. 1.21. |
цу всюду действует один и тот же вектор силы, т. е. F |
|
const. Если центр сил центрального поля удален в беско- |
||
|
нечность, то такое поле приближенно можно считать однородным. Так гравитационное поле Земли у ее поверхности в относительно небольшой области

37
пространства близко к однородному (рис. 1.21). Также приближенно является однородным электрическое поле между пластинами плоского конденсатора.
1.5.2. Энергия. Работа сил поля. Мощность
Существует ряд различных форм движения материи – механическая, тепловая, электромагнитная. Их общей мерой является скалярная физическая величина называемая энергией, а взаимные превращения из одной формы в другую происходят в строго определенных количественных соотношениях. Для анализа качественно различных форм движения вводят разные виды энергии.
В механике простейшими формами движения материи являются перемещение тел в пространстве и силовое взаимодействие между телами системы. Этим формам движения соответствуют кинетическая и потенциальная энергии.
При превращении одной формы движения в другую совершается работа, равная переходу энергии от одного вида к другому. Энергия и работа измеряются в одних и тех же единицах. В системе СИ такой единицей является 1 Джоуль (Дж).
Если тело под действием постоянной силы F перемещается по прямой линии ( r s ), то при этом совершается механическая работа
|
|
F |
A Fs cosα F s , |
|
|
|
|
|
|
|
|
|
|
|
где α – угол между направлениями силы и перемещения |
|
r |
F |
|
|
Рис. 1.22. |
тела (рис. 1.22), F F cos – проекция вектора силы на |
|
|
направление перемещения. Величина работы может иметь |
||
|
|
|
|
разный знак, а также быть равной нулю.
A 0, если cosα = 0 т. е. α = 900 (сила перпендикулярна перемещению);
A 0, если cosα > 0, т. е. α < 900 (угол между силой и перемещением острый);
A 0 , если cosα < 0, т. е. α > 900 (угол α тупой).
Если направления силы и перемещения совпадают, то A Fs .
За единицу работы принимают такую работу, которую совершает сила в 1Н при перемещении тела в направлении действия силы на расстояние 1 м.
A 1 H 1 м 1 Н м 1 Дж .
38
Если составляющая силы F в направлении перемещения во время движения тела не остаѐтся постоянной (т. е. меняется или величина силы, или угол α), то работа А может быть найдена путѐм интегрирования элементарных работ A , совершенных на малых участках пути ds , в пределах которых составляющую силы F можно считать постоянной:
A F ds .
Так как ds dr , то элементарную работу A F dr cos можно записать в
виде скалярного произведения: A F dr . Тогда работа на всем пути будет равна:
|
F |
A F ds |
|
|
|
|
|
A F ds или A F dr . |
||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Графически работу можно |
представить |
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
A |
|
|
|
|
как площадь под кривой F s (рис. 1.23). |
|||||||
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость совершения работы характери- |
||||||
|
|
|
|
|
|
|
зуется |
величиной, |
называемой |
мощностью. |
||||
1 |
ds |
2 |
s |
Мощность – это работа, совершаемая в единицу |
||||||||||
|
|
Рис. 1.23. |
|
|
времени (за 1 секунду): |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
N = |
dA |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
N |
F ds |
F v F |
v . |
|
|||
5. |
|
|
|
|
|
|
|
dt |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если работа выполняется равномерно, то N At . Так же определяется и
среднее значение мощности  N
N  At . В системе СИ мощность измеряется в ваттах N = 11Джс = 1Вт .
At . В системе СИ мощность измеряется в ваттах N = 11Джс = 1Вт .
1.5.3. Потенциальные силовые поля. Консервативные и диссипативные силы
39
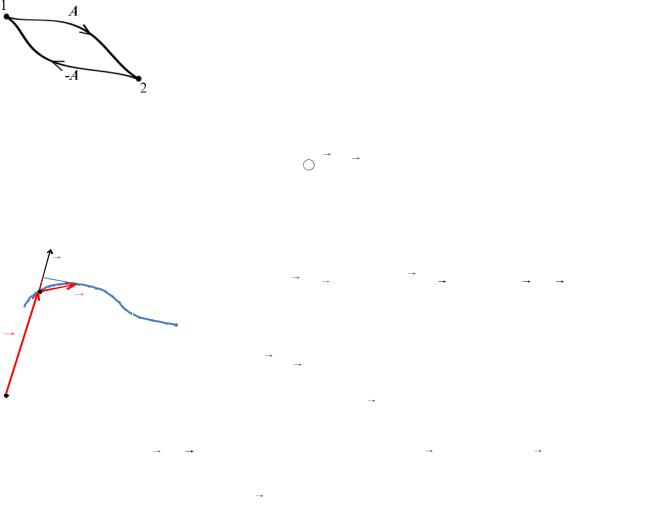
Силовое поле называют потенциальным, а силы, действующие в нѐм, консервативными, если работа сил поля по перемещению материальной точки не зависит от вида траектории движения, а зависит только от по-
Рис. 1.24. ложений материальной точки в исходном и конечном состояниях. В этом случае работа сил поля по замкну-
той траектории равна нулю (рис. 1.24): F dr 0 .
Все центральные силовые поля являются потенциальными. Действительно, работа сил поля
er |
|
|
(2) |
|
(2) |
(2) |
|
||||||
drr |
|
A |
F |
dr Fr |
(r) |
r |
dr Fr (r)er dr . |
||||||
M dr |
|
|
|||||||||||
|
|
|
|
(1) |
|
(1) |
|
r |
|
||||
|
|
|
|
|
|
(1) |
|
||||||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор |
|
r |
|
e |
|
– единичный вектор, |
задающий на- |
||||
|
|
|
|
|
|||||||||
|
|
r |
|
|
|||||||||
O |
|
|
|
|
r |
|
|
|
|
|
|||
правление радиус-вектора r |
материальной точки М, про- |
||||||||||||
|
|||||||||||||
Рис. 1.25. |
веденного из центра силового поля (рис. |
1.25). Так как |
|||||||||||
|
er dr drr – проекция вектора dr на вектор er или на |
||||||||||||
2
соответствующий радиус-вектор r , то работа A Fr (r) drr . Полученное вы-
1
ражение зависит только от вида функции Fr (r) , т. е. от характера взаимодействия, и от значений r1 и r2 – начального и конечного положений точки М.
К потенциальным полям относятся гравитационное поле Земли, поле точечного заряда, поле упругих сил. Соответственно гравитационные, кулоновские и упругие силы являются консервативными.
Силы, работа которых зависит от траектории движения, неконсервативны. Если действие таких сил приводит к переходу энергии из механической в немеханические формы, то эти силы называют диссипативными. К ним относятся силы трения скольжения и сопротивления среды.
Сила трения скольжения возникает при скольжении одного тела по поверхности другого. При отсутствии смазки между поверхностями тел спра-
ведлив закон сухого трения: сила трения скольжения не зависит от площади трущихся поверхностей и пропорциональна силе нормального давления:
Fтр Fn ,