

|
|
|
|
|
|
|
109 |
3) |
|
При разности фаз |
sin 1, cos 0 и уравнение (2.6) перехо- |
||||
|
|
|
|
|
2 |
|
|
дит |
в |
уравнение эллипса симметричного относительно осей координат: |
|||||
2 |
|
|
|
2 |
|
|
|
|
x |
|
|
y |
|
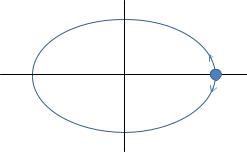
1. Исследуем направление движение тела по этому эллипсу. Поло- |
|
|
2 |
|
|
2 |
|||
|
A |
|
B |
|
|
|
|
жение тела в момент времени t 0 находим из уравнений (2.2) и (2.3). Если
2 , то
x Acos t |
|
|
|
||
|
|
|
|
|
|
|
t |
Asin t |
(2.7) |
||
y Acos |
|
|
|||
|
|
|
2 |
|
|
Если 2 , то
x Acos t |
|
|
|
||
|
|
|
|
|
(2.8) |
|
t |
Asin t |
|||
y Acos |
|
|
|||
|
|
|
2 |
|
|
y
B |
|
|
2 |
||
|
A |
|
|
|
|
|
2 |
|
В момент времени t 0 в обоих случаях ко- |
|
|
леблющееся |
тело имеет координаты |
x |
x A, y 0. |
При разности фаз в по- |
|
2 |
|
следующий момент времени координата y становится отрицательной. Движение совершается по часовой стрелке (рис. 2.9). При
|
разности фаз |
|
|
в последующий мо- |
|
Рис. 2.9. |
2 |
||||
|
|
|
|||
|
|
|
|
мент времени координата y становится положительной. Следовательно, движение совершается против часовой стрелки.
2.1.4. Скорость и ускорение при гармонических колебаниях
Рассмотрим материальную точку, совершающую гармоническое колебание по закону
x Acos( t ) . |
(2.9) |

110
Определим закон, по которому изменяются скорость и ускорение этой точки. Взяв производную колеблющейся величины x по времени t , найдем скорость движения точки в проекции на ось х:
vx dxdt A sin( t ) .
Применив тригонометрическую формулу приведения, запишем
vx |
|
t |
|
|
A cos |
|
, |
||
|
|
|
2 |
|
где A амплитуда скорости колеблющейся точки. Сравнивая (2.9) и
видим, что скорость опережает колеблющуюся величину по фазе на
2
ан.
(2.10)
(2.11)
(2.11),
ради-
Найдем уравнение изменения ускорения как первую производную скорости по времени (или как вторую производную от колеблющейся величины x по времени t ). В проекции на ось х
|
a |
|
|
dvx |
|
d 2 x |
A 2 cos( t ) |
(2.12) |
||
|
x |
|
|
|||||||
|
|
|
dt |
|
|
dt2 |
|
|||
|
|
|
|
|
|
|
|
|
или |
|
|
|
|
|
a |
x |
A 2 cos( t ) , |
(2.13) |
|||
|
|
|
|
|
|
|
|
|
|
|
где A 2 |
амплитуда ускорения. Сравнивая (2.9) и (2.13), приходим к выводу, |
|||||||||
что ускорение опережает колеблющуюся величину по фазе на радиан. |
|
|||||||||
2.1.5. Дифференциальное уравнение свободных гармонических колебаний
Определим силу, действующую на тело, совершающее свободные гармонические колебания. Для этого применим второй закон Ньютона Fx max .
Сравнивая (2.9) и (2.12), запишем
a |
x |
2 x , |
(2.14) |
|
|
|
тогда сила будет равна: |
F m 2 x . |
|
x |
111
То есть сила, действующая на тело, прямо пропорциональна его смещению x от положения равновесия. По такому же закону изменяется упругая сила при растяжении и сжатии пружины на величину x : Fx kx . Для пружины k называют коэффициентом упругости. Для тела, совершающего гармонические колебания, величину k m 2 называют коэффициентом квази-
упругой силы или коэффициентом жесткости, а силу, действующую на тело,
записывают в виде
Fx kx .
Запишем в уравнении (2.14) ускорение как вторую производную колеб-
лющейся величины x по времени t : |
d 2 x |
2 x или |
d 2 x |
2 x 0 . Для соб- |
|
dt2 |
dt2 |
||||
|
|
|
ственных колебаний циклическую частоту обозначают с индексом нуль, тогда
d 2 x 2 x 0 . dt2 0
Это уравнение называют дифференциальным уравнением свободных гармонических колебаний. Его также можно записать в следующем виде:
x 02 x 0 .
2.1.6.Маятники
2.1.6.1.Пружинный маятник
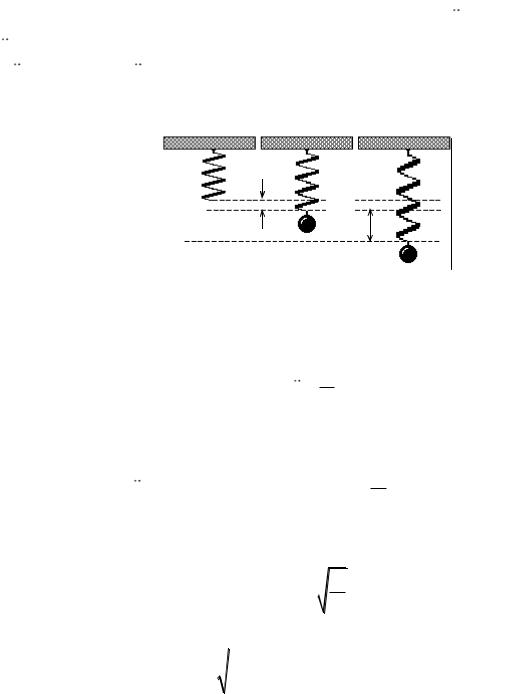
Пусть на пружине жесткостью k подвешено тело массой m (рис. 2.10). Массу пружины предполагаем настолько малой, чтобы при колебаниях ею можно было пренебречь. Такая система называется пружинным маятником. Поместим начало отсчета оси x в точку, соответствующую равновесному положению тела в состоянии покоя. В этом положении благодаря действию силы тяжести пружина растянута на величину x0 , определяемую соотношением
mg kx0 . |
(2.15) |
112
При смещении тела на величину x из положения равновесия проекция силы, действующей на тело со стороны пружины, равна Fx k(x x0 ) . Тогда второй закон Ньютона в проекции на ось х имеет вид mx mg k(x x0 ) , где
x ускорение тела. С учетом (2.15) это уравнение можно переписать в виде mx kx , или mx kx 0. Разделив обе части уравнения на массу m , получим
|
|
0 |
|
х0 |
х |
|
|
х
Рис. 2.10.
x mk x 0 .
Сравнивая это уравнение с дифференциальным уравнением гармониче-
ских колебаний x 02 x 0 , найдем, что 02 mk . Циклическая частота собст-
венных колебаний пружинного маятника
0  mk ,
mk ,
а период колебаний T 2 |
|
m |
|
. |
|
||||
0 |
|
k |
||
|
|
|||
2.1.6.2. Физический и математический маятники
Уравнение движения колебательной системы можно получить не только из уравнений динамики, но и из закона сохранения энергии. Рассмотрим это на примере физического маятника.
113
О |
WП |
0 |
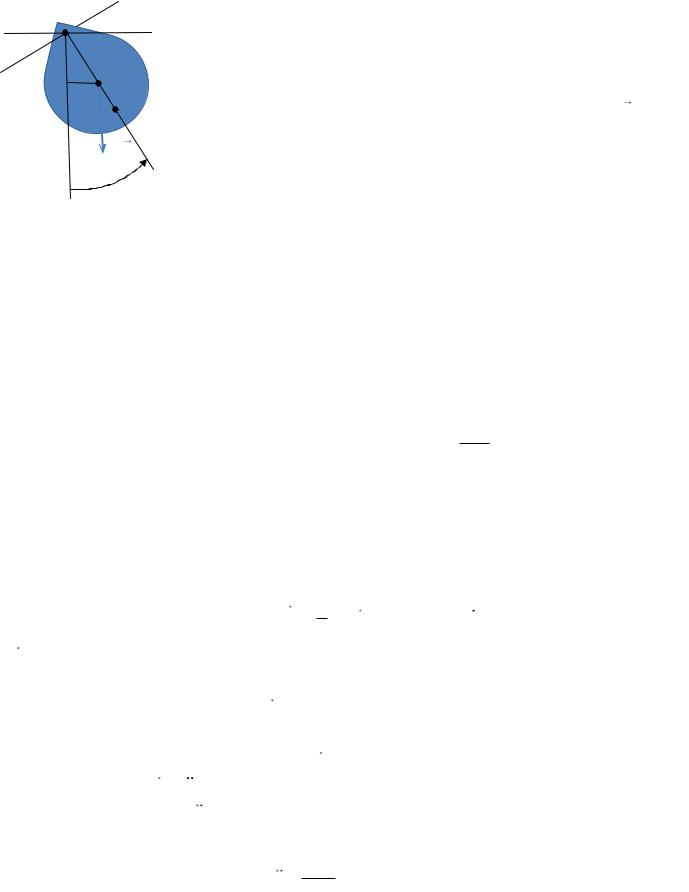
Под физическим маятником понимают твердое те- |
|
|
ло, совершающее под действием силы тяжести колебания |
|||
|
|
|
||
h |
a |
|
вокруг неподвижной горизонтальной оси, не проходящей |
|
A |
С |
|
через его центр масс. Обозначим буквой C центр масс |
|
|
О |
|
твердого тела, к которому приложена сила тяжести |
mg |
|
mg |
|
(рис. 2.11). |
|
|
|
Отклонив маятник от положения равновесия, |
мы |
|
|
|
|
||
|
|
сообщаем ему потенциальную энергию. Выберем за ну- |
||
|
|
|
||
|
|
|
левой уровень потенциальной энергии уровень горизон- |
|
Рис. 2.11. |
|
тальной оси колебаний. Тогда потенциальная энергия |
||
|
|
|
маятника будет равна Wп mgh , где h – глубина по- |
|
гружения центра масс C маятника под нулевой уровень. Глубину погружения h определим из прямоугольного треугольника OAC : h a cos , где a – расстояние от центра масс C до оси колебаний O , – угол отклонения маятника от положения равновесия. Тогда Wп mga cos .
В процессе колебаний потенциальная энергия маятника Wп переходит в кинетическую энергию вращательного движения Wk I 2 2 , где I – момент
инерции маятника относительно оси колебаний, – угловая скорость поворота вокруг этой оси. Если не учитывать силы трения и силы сопротивления, то полная механическая энергия маятника остается величиной постоянной,
|
|
I 2 |
|
W W W |
|
mga cos const., а производная полной механической |
|
|
|||
k |
п |
2 |
|
|
|
|
|
энергии по времени равна нулю W 2I 2 (mga sin ) 0 . Учитывая, что, после сокращений получим
I mgasin 0 .
Производная угловой скорости равна второй производной угла поворота по времени . Для малых углов поворота , выраженных в радианах, sin . Тогда I mga 0 , и, после деления на момент инерции I , получим:
mga 0 .
I
114
Сравнивая это уравнение с дифференциальным уравнением гармонических колебаний x 02 x 0 , видим, что при малых углах отклонения колеба-
ния будут гармоническими, а |
2 |
|
mga |
. Циклическая частота собственных |
||||||
0 |
|
|
|
|||||||
|
|
|
I |
|||||||
|
|
|
|
|
||||||
колебаний физического маятника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
mga |
, |
|||||
|
|
|
|
|||||||
|
|
|
0 |
|
|
|
|
I |
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
а период этих колебаний T0 2 |
|
|
I |
. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
mga |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||
Математическим маятником называют систему, состоящую из невесомой и нерастяжимой нити, на которой подвешено тело, которое можно считать материальной точкой. Хорошим приближением к математическому маятнику служит небольшой тяжелый шарик, подвешенный на длинной тонкой нити. Обозначим длину нити подвеса через . Математический маятник – это частный случай физического маятника, момент инерции которого равен моменту инерции материальной точки I m 2 , – длина нити.
При малых углах отклонения от положения равновесия математический
маятник совершает гармонические колебания, период которых |
T0 |
2 |
m |
2 |
. |
|
|
||||
mg |
|
||||
|
|
|
|
|
Сократив на m и , получим период колебаний математического маятника
T0 2 
 g .
g .
Приведенной длиной физического маятника называют длину такого математического маятника, период колебаний которого совпадает с периодом
физического маятника 2 |
пр |
2 |
|
I |
|
|
. Отсюда приведенная длина физи- |
|
|
|
|
|
|||||
|
g |
|
|
mga |
||||
ческого маятника |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
. |
||
|
|
|
пр |
|
||||
|
|
|
|
ma |
||||
|
|
|
|
|
||||