

|
|
|
89 |
|
|
|
J xx |
0 |
0 |
|
|
ˆ |
|
0 |
J yy |
0 |
|
J |
|
. |
|||
|
|
0 |
0 |
|
|
|
|
J zz |
|||
Момент импульса в этом случае L Jxx xi J yy y j Jzz z k .
При вращении тела вокруг главной оси векторы момента импульса и угловой скорости совпадают по направлению.
1.8.7. Работа, совершаемая при вращательном движении
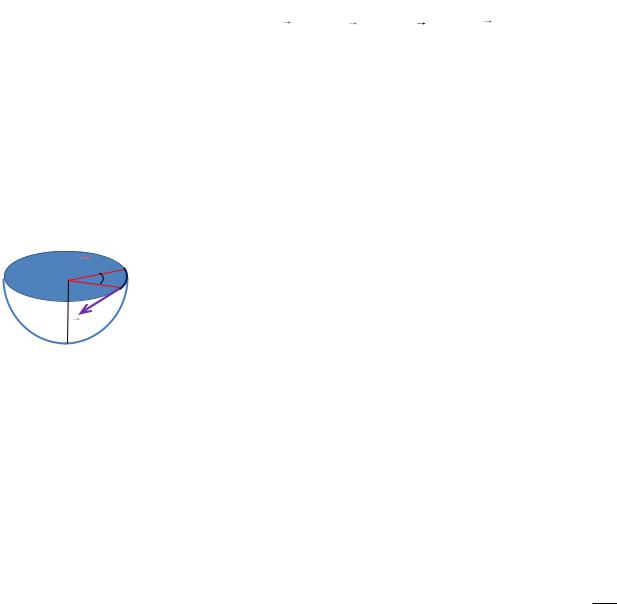
Рассмотрим произвольное тело, которое совершает вращательное дви-
|
|
|
z |
|
жение под действием тангенциальной силы F (рис.1.64). |
|
|
|
|
|
|||
|
|
|
|
При повороте на некоторый угол d совершается работа |
||
|
|
|
|
|
|
|
|
|
|
r |
d ds |
dA F ds , где ds rd . Тогда dA F rd . Учитывая, что |
|
|
|
|
|
|
F r M z есть момент силы относительно оси z , получим: |
|
|
|
|
|
|
|
|
|
|
F |
|
dA M z d . |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.64
выражение:
Для нахождения полной работы проинтегрируем это
2
A M z d . Если Mz = const., то в этом случае A M z .
1
1.8.8. Кинетическая энергия вращающегося тела
Разобьем мысленно вращающееся твѐрдое тело на систему материаль-
ных точек. Кинетическая энергия каждой материальной точки dWк dm2 v2 .
Учитывая, что v r , получим dW |
dm r2 2 |
. Тогда кинетическая энергия |
|||||||||
|
|
||||||||||
|
|
|
к |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вращающегося тела W |
|
dW |
2 |
|
r2dm |
(угловая скорость постоянна для |
|||||
2 |
|||||||||||
к |
|
к |
|
|
|
|
|
|
|
|
|
всех материальных точек |
тела и |
вынесена за знак интеграла). Интеграл |
|||||||||
r2dm I есть момент инерции этого тела относительно оси z , т. е. |
|||||||||||
|
|
|
|
W |
I |
2 |
. |
|
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
k |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

90
Умножив числитель и знаменатель на момент инерции I , и, учитывая, что I L получим:
Wк L2 .
2I
Если тело катится, то оно участвует в двух движениях: поступательном (скорость этого движения равна скорости центра масс) и во вращательном движении вокруг оси, проходящей через этот центр масс. Кинетическая энергия катящегося тела
mv2 I 2
Wк 2C 02 .
Здесь vC – линейная скорость центра масс, I0 – момент инерции тела относительно оси, проходящей через центр масс.
1.8.9. Основной закон динамики вращательного движения
Тангенциальная сила F , совершая работу dA = Mzdφ, увеличивает кинетическую энергию вращающегося тела на dWk :
M z d dWk .
Возьмѐм дифференциал кинетической энергии вращения W |
I 2 |
|
|
: |
|
|
||
k |
2 |
|
|
|
|
dWk I d . Получим: M z d I d . Разделим обе части этого равенства на
промежуток времени dt . Тогда M |
|
d |
I |
d |
. Учитывая, что |
d |
есть мо- |
z |
|
|
|
||||
|
dt |
|
dt |
|
dt |
||
|
|
|
|
||||
дуль угловой скорости ω, после сокращений получим:
M z I ,
где ddt – проекция вектора углового ускорения на ось z.
Полученная формула представляет собой основной закон динамики вращательного движения. Векторное равенство
M I
91
справедливо в случае, когда вектор момента силы направлен вдоль оси вращения (рис. 1.65). Для вращательного движения этот закон играет роль второго закона Ньютона F ma .
Отсюда вытекает физический смысл момента инерции тела относительно оси вращения. Если на два тела, обладающих разными моментами инерции, подействовать одним и тем же моментом силы, то тело, обладающее большим моментом инерции, получит меньшее уг-
ловое ускорение. Момент инерции есть мера инертности тела для вращательного движения.
1.8.10.Уравнение моментов
Вцентральном поле тяготения многие тела (планеты, спутники) движутся по замкнутым траекториям – орбитам. Законом динамики орбитального движения тела является второй закон Ньютона
F ddtp .
Выберем некоторую точку О. Умножим векторно обе части этого равенства слева на радиус-вектор r , проведенный из точки O к центру масс тела
|
|
|
|
|
|
|
|
|
d p |
|
|
|
|
|
|
|
|
|||||||
|
|
|
r , |
|
|
|
|
|
. |
|
|
|
|
|
|
(1.10) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
r , |
F |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
||||
|
|
Орбитальный момент импульса тела L r , |
|
p . Возьмем производную |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dL |
|
d r |
|
|
d p |
|
|||||
по времени обеих частей этого равенства: |
|
|
|
|
|
|
|
|
|
, p |
r , |
|
|
. Вектор |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
dt |
|
|
dt |
|
|||||
|
d r |
равен скорости движения центра масс тела и совпадает по направлению с |
||||||||||||||||||||||
|
dt |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
вектором импульса тела p , поэтому |
|
, p 0 , и, следовательно |
|
|||||||||||||||||||||
|
|
|||||||||||||||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
dL |
|
|
|
d p |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
r , |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
(1.11) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
dt |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|||||||
92 |
|
|
|
|
|
Сравнивая (1.10) и (1.11) и учитывая, что |
|
|
есть момент равно- |
||
r , |
F |
||||
действующей силы относительно точки O , получим |
|
|
|||
M |
dL |
. |
|
|
(1.12) |
|
|
|
|||
|
dt |
|
|
|
|
Момент равнодействующей силы относительно некоторой точки O выбранной системы отсчета равен производной по времени орбитального момента импульса тела относительно той же точки O .
Если тело одновременно участвует и в поступательном, и во вращательном движениях, то необходимо учитывать как орбитальный, так и собственный момент импульса тела. Полный момент импульса тела равен векторной сумме этих моментов L Lорб Lсоб , а закон динамики имеет вид (1.12),
где M – результирующий момент всех сил, действующих на тело, L – полный момент импульса тела.
1.8.11.Закон сохранения момента импульса
Пусть имеется система n тел, взаимодействующих только друг с другом. Внешние силы либо отсутствуют, либо сумма моментов этих сил равна нулю. Под действием этих сил тела могут участвовать как в поступательном, так и во вращательном движении.
Запишем для каждого тела уравнение динамики (уравнение моментов):
M1,2 M1,3 |
|
M1,n |
|
dL1 |
|
|||||
|
dt |
|||||||||
|
|
|
|
|
|
|||||
M 2,1 M 2,3 |
|
M 2,n |
|
|
dL2 |
|
||||
|
|
dt . |
||||||||
|
|
|
|
|
|
|
||||
M n,1 M n,2 |
M n,n 1 |
|
|
dLn |
|
|||||
|
dt |
|||||||||
|
|
|
|
|
|
|
||||
Сложим левые и правые части этих уравнений. В левой части сумма моментов сил взаимодействия согласно п. 1.8.1 равна нулю. В правой части
сумма производных равна производной суммы. Тогда |
d (L1 L2 |
Ln ) |
0 , |
dt |
|
||
|
|
|
|
и |
|
|
|