13.2.1. Метод Зойтендейка
Пусть требуется найти максимальное значение вогнутой функции :
при условиях
 .
(13.14)
.
(13.14)
Характерной особенностью этой задачи является то, что её система ограничений содержит только линейные неравенства.
Предположим
также для любой допустимой точки
,
что
![]() и
и
![]() ,
где
,
где
![]() и
и
![]() .
Далее приводится алгоритм Зойтендейка
для случая линейных ограничений.
.
Далее приводится алгоритм Зойтендейка
для случая линейных ограничений.
Алгоритм метода Зойтендейка
Начальный этап. Выбрать начальную точку , для которой
и ,
![]() ,
,
![]() .
.
Положить .
Основной этап.
Шаг
1. Для
предполагаем, что
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Шаг
2. Определить возможное направление
подъёма
![]() ,
решая следующую задачу:
,
решая следующую задачу:
![]() (13.15)
(13.15)
при условиях
![]() .
(13.16)
.
(13.16)
Шаг
3. Если
![]() ,
то
-
задача решена. В противном случае перейти
к шагу 4.
,
то
-
задача решена. В противном случае перейти
к шагу 4.
Шаг 4. Определить (шаг в направлении ), решая задачу одномерной оптимизации:
![]() .
.
Шаг
5. Положить
,
заменить
на
![]() и перейти к шагу 1.
и перейти к шагу 1.
Дадим некоторые пояснения к алгоритму.
На шаге 2 решается вспомогательная задача, являющаяся задачей линейного программирования. Конечно, надо быть уверенным в её разрешимости и, соответственно, в существовании возможного направления подъёма .
Вектор
![]() является возможным направлением подъёма
в точке
,
если
является возможным направлением подъёма
в точке
,
если
![]() и
и
![]() .
Поскольку множество планов построенной
ЗЛП ограниченно, вспомогательная задача
всегда разрешима. А если существует
.
Поскольку множество планов построенной
ЗЛП ограниченно, вспомогательная задача
всегда разрешима. А если существует
![]() ,
то
,
то
![]() .
Причём для
.
Причём для
![]() :
:
![]() ,
следовательно,
,
следовательно,
![]() .
Если
.
Если
![]() ,
то есть возможность найти лучшую точку.
Если
,
то есть возможность найти лучшую точку.
Если
![]() ,
то выбрать возможное направление подъёма
не представляется возможным.
,
то выбрать возможное направление подъёма
не представляется возможным.
Для
шага 4 необходимо определить величину
![]() .
Рассмотрим неравенство:
.
Рассмотрим неравенство:
![]() .
Так как
.
Так как
![]() ,
,
то
,
,
то
![]() ,
,
![]() .
.
Отсюда
![]() и определяем
для этого неравенства.
определяется при следующих условиях:
и определяем
для этого неравенства.
определяется при следующих условиях:
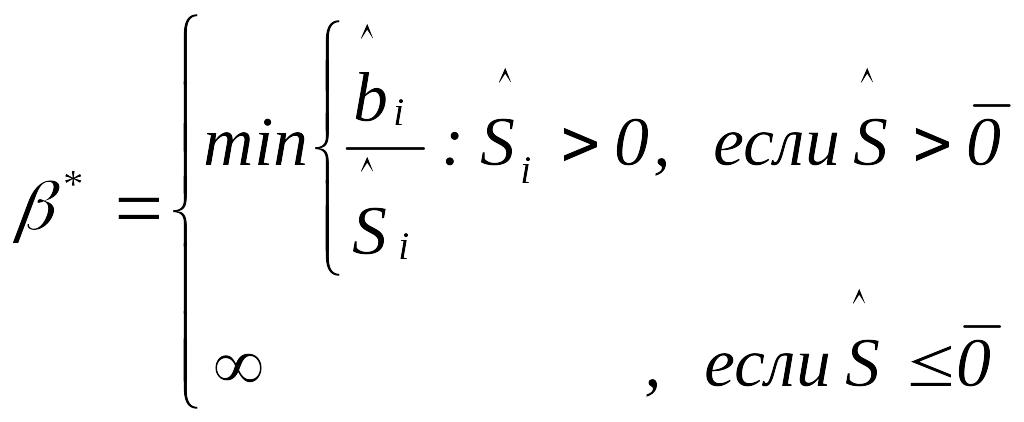 (13.17)
(13.17)
где
![]() ,
,
![]() .
.
Пример 13.2
![]()
![]()
![]()
![]()
![]() .
.
Начальный
этап. Выбираем
начальную точку
![]() ,
для которой
,
для которой
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
![]() .
Положить
.
.
Положить
.
Основной этап.
Итерация 1.
Шаг
1. Для
заданы
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Шаг
2. ![]() .
.
Решаем задачу:
![]()
при условиях
![]()
![]()
![]()
![]() .
.
При
решении этой задачи симплекс-методом
получаем
![]() ,
,
![]() .
.
Шаг
3. Так как
![]() ,
то переходим к шагу 4.
,
то переходим к шагу 4.
Шаг 4. Решаем одномерную задачу:
![]() .
.
Определяем (согласно 3.17):
![]() ,
,
т. е. решаем задачу:
![]()
![]() .
.
Очевидно,
что решением является
![]() .
.
Шаг
5. Положить
![]() .
.
и перейти к шагу 1.
Итерация 2
Шаг
1. Для
![]() :
:
![]() ,
,
![]() .
.
Шаг
2. ![]() .
.
Решаем
задачу
![]() при условиях:
при условиях:
![]()
.
Оптимальное
значение этой ЗЛП –
![]() ;
;
![]() .
.
Шаг
3. Так как
![]() ,
переходим к шагу 4.
,
переходим к шагу 4.
Шаг 4. Решаем задачу линейного поиска:
![]() .
.
Определяем :
![]() .
.
Таким образом, решая задачу
![]() ,
получим оптимальное значение
:
,
получим оптимальное значение
:
![]() .
.
Шаг
5. Положить:
![]() .
.
![]() и перейти к шагу 1.
и перейти к шагу 1.
Итерация 3
Шаг
1. Для
![]() :
:
![]() ,
,
![]() .
.
Шаг
2. ![]() .
.
Решаем задачу
![]()
при условиях:
.
Решение:
![]() ,
,
![]() .
.
Шаг
3. Так как
,
задача решена и
![]() .
.
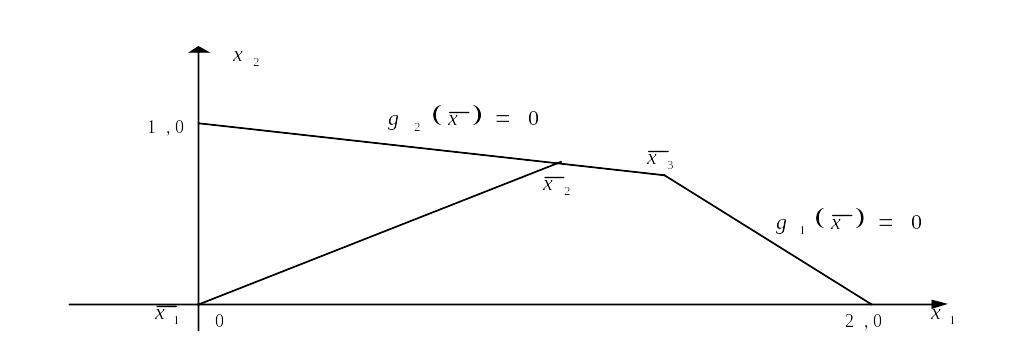
На рис. 13.6 проиллюстрирован процесс решения задачи.